 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Llama 4 Herd: Architecture, Training, Evaluation, and Deployment Notes
Jan 15, 2026This document consolidates publicly reported technical details about Metas Llama 4 model family. It summarizes (i) released variants (Scout and Maverick) and the broader herd context including the previewed Behemoth teacher model, (ii) architectural characteristics beyond a high-level MoE description covering routed/shared-expert structure, early-fusion multimodality, and long-context design elements reported for Scout (iRoPE and length generalization strategies), (iii) training disclosures spanning pre-training, mid-training for long-context extension, and post-training methodology (lightweight SFT, online RL, and lightweight DPO) as described in release materials, (iv) developer-reported benchmark results for both base and instruction-tuned checkpoints, and (v) practical deployment constraints observed across major serving environments, including provider-specific context limits and quantization packaging. The manuscript also summarizes licensing obligations relevant to redistribution and derivative naming, and reviews publicly described safeguards and evaluation practices. The goal is to provide a compact technical reference for researchers and practitioners who need precise, source-backed facts about Llama 4.
SkiLD: Unsupervised Skill Discovery Guided by Factor Interactions
Oct 24, 2024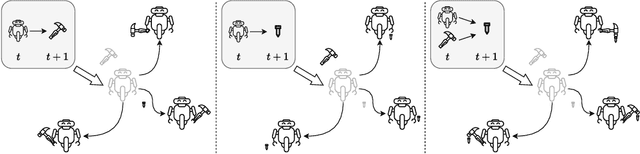
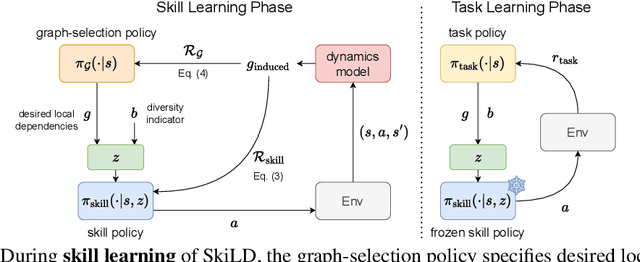
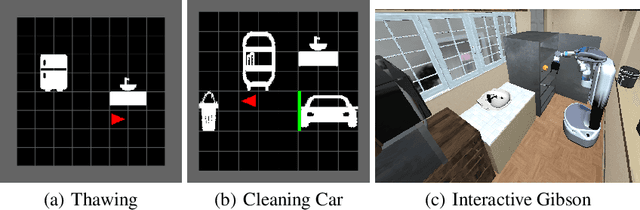
Unsupervised skill discovery carries the promise that an intelligent agent can learn reusable skills through autonomous, reward-free environment interaction. Existing unsupervised skill discovery methods learn skills by encouraging distinguishable behaviors that cover diverse states. However, in complex environments with many state factors (e.g., household environments with many objects), learning skills that cover all possible states is impossible, and naively encouraging state diversity often leads to simple skills that are not ideal for solving downstream tasks. This work introduces Skill Discovery from Local Dependencies (Skild), which leverages state factorization as a natural inductive bias to guide the skill learning process. The key intuition guiding Skild is that skills that induce <b>diverse interactions</b> between state factors are often more valuable for solving downstream tasks. To this end, Skild develops a novel skill learning objective that explicitly encourages the mastering of skills that effectively induce different interactions within an environment. We evaluate Skild in several domains with challenging, long-horizon sparse reward tasks including a realistic simulated household robot domain, where Skild successfully learns skills with clear semantic meaning and shows superior performance compared to existing unsupervised reinforcement learning methods that only maximize state coverage.
The Llama 3 Herd of Models
Jul 31, 2024Modern artificial intelligence (AI) systems are powered by foundation models. This paper presents a new set of foundation models, called Llama 3. It is a herd of language models that natively support multilinguality, coding, reasoning, and tool usage. Our largest model is a dense Transformer with 405B parameters and a context window of up to 128K tokens. This paper presents an extensive empirical evaluation of Llama 3. We find that Llama 3 delivers comparable quality to leading language models such as GPT-4 on a plethora of tasks. We publicly release Llama 3, including pre-trained and post-trained versions of the 405B parameter language model and our Llama Guard 3 model for input and output safety. The paper also presents the results of experiments in which we integrate image, video, and speech capabilities into Llama 3 via a compositional approach. We observe this approach performs competitively with the state-of-the-art on image, video, and speech recognition tasks. The resulting models are not yet being broadly released as they are still under development.