 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Muscle EMG construction using A Physics-Integrated Deep Learning approach
Mar 07, 2025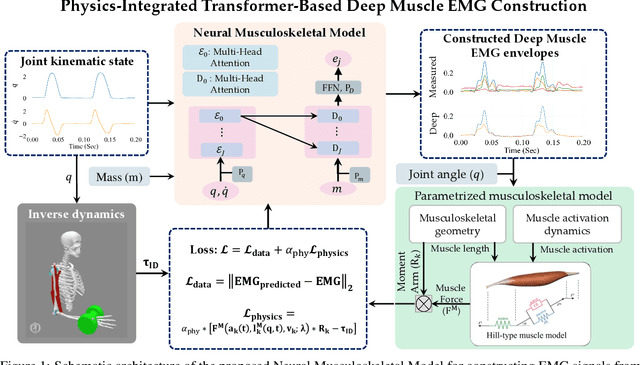
Electromyography (EMG)--based computational musculoskeletal modeling is a non-invasive method for studying musculotendon function, human movement, and neuromuscular control, providing estimates of internal variables like muscle forces and joint torques. However, EMG signals from deeper muscles are often challenging to measure by placing the surface EMG electrodes and unfeasible to measure directly using invasive methods. The restriction to the access of EMG data from deeper muscles poses a considerable obstacle to the broad adoption of EMG-driven modeling techniques. A strategic alternative is to use an estimation algorithm to approximate the missing EMG signals from deeper muscle. A similar strategy is used in physics-informed deep learning, where the features of physical systems are learned without labeled data. In this work, we propose a hybrid deep learning algorithm, namely the neural musculoskeletal model (NMM), that integrates physics-informed and data-driven deep learning to approximate the EMG signals from the deeper muscles. While data-driven modeling is used to predict the missing EMG signals, physics-based modeling engraves the subject-specific information into the predictions. Experimental verifications on five test subjects are carried out to investigate the performance of the proposed hybrid framework. The proposed NMM is validated against the joint torque computed from 'OpenSim' software. The predicted deep EMG signals are also compared against the state-of-the-art muscle synergy extrapolation (MSE) approach, where the proposed NMM completely outperforms the existing MSE framework by a significant margin.
EEG-based 90-Degree Turn Intention Detection for Brain-Computer Interface
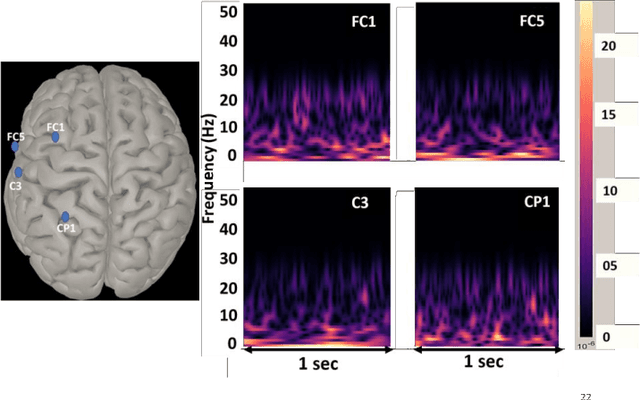
Oct 15, 2024Electroencephalography (EEG)--based turn intention prediction for lower limb movement is important to build an efficient brain-computer interface (BCI) system. This study investigates the feasibility of intention detection of left-turn, right-turn, and straight walk by utilizing EEG signals obtained before the event occurrence. Synchronous data was collected using 31-channel EEG and IMU-based motion capture systems for nine healthy participants while performing left-turn, right-turn, and straight walk movements. EEG data was preprocessed with steps including Artifact Subspace Reconstruction (ASR), re-referencing, and Independent Component Analysis (ICA) to remove data noise. Feature extraction from the preprocessed EEG data involved computing various statistical measures (mean, median, standard deviation, skew, and kurtosis), and Hjorth parameters (activity, mobility, and complexity). Further, the feature selection was performed using the Random forest algorithm for the dimensionality reduction. The feature set obtained was utilized for 3-class classification using XG boost, gradient boosting, and support vector machine (SVM) with RBF kernel classifiers in a five-fold cross-validation scheme. Using the proposed intention detection methodology, the SVM classifier using an EEG window of 1.5 s and 0 s time-lag has the best decoding performance with mean accuracy, precision, and recall of 81.23%, 85.35%, and 83.92%, respectively, across the nine participants. The decoding analysis shows the feasibility of turn intention prediction for lower limb movement using the EEG signal before the event onset.
sEMG-Driven Physics-Informed Gated Recurrent Networks for Modeling Upper Limb Multi-Joint Movement Dynamics
Aug 29, 2024Exoskeletons and rehabilitation systems offer great potential for enhancing human strength and recovery through advanced human-machine interfaces (HMIs) that adapt to movement dynamics. However, the real-time application of physics-informed neural networks (PINNs) is limited by their reliance on fixed input lengths and surrogate models. This study introduces a novel physics-informed Gated Recurrent Network (PiGRN) designed to predict multi-joint torques using surface electromyography (sEMG) data. The PiGRN model employs a Gated Recurrent Unit (GRU) to convert time-series sEMG inputs into multi-joint kinematics and external loads, which are then integrated into an equation of motion to ensure consistency with physical laws. Experimental validation with sEMG data from five participants performing elbow flexion-extension tasks showed that the PiGRN model accurately predicted joint torques for 10 unfamiliar movements, with RMSE values between 4.02\% and 11.40\% and correlation coefficients ranging from 0.87 to 0.98. These findings highlight the PiGRN's potential for real-time exoskeleton and rehabilitation applications. Future research will explore more diverse datasets, improve musculoskeletal models, and investigate unsupervised learning methods.
Generative Design of Multimodal Soft Pneumatic Actuators
Aug 12, 2024The recent advancements in machine learning techniques have steered us towards the data-driven design of products. Motivated by this objective, the present study proposes an automated design methodology that employs data-driven methods to generate new designs of soft actuators. One of the bottlenecks in the data-driven automated design process is having publicly available data to train the model. Due to its unavailability, a synthetic data set of soft pneumatic network (Pneu-net) actuators has been created. The parametric design data set for the training of the generative model is created using data augmentation. Next, the Gaussian mixture model has been applied to generate novel parametric designs of Pneu-net actuators. The distance-based metric defines the novelty and diversity of the generated designs. In addition, it is noteworthy that the model has the potential to generate a multimodal Pneu-net actuator that could perform in-plane bending and out-of-plane twisting. Later, the novel design is passed through finite element analysis to evaluate the quality of the generated design. Moreover, the trajectory of each category of Pneu-net actuators evaluates the performance of the generated Pneu-net actuators and emphasizes the necessity of multimodal actuation. The proposed model could accelerate the design of new soft robots by selecting a soft actuator from the developed novel pool of soft actuators.
Modeling and parametric optimization of 3D tendon-sheath actuator system for upper limb soft exosuit
Jun 30, 2023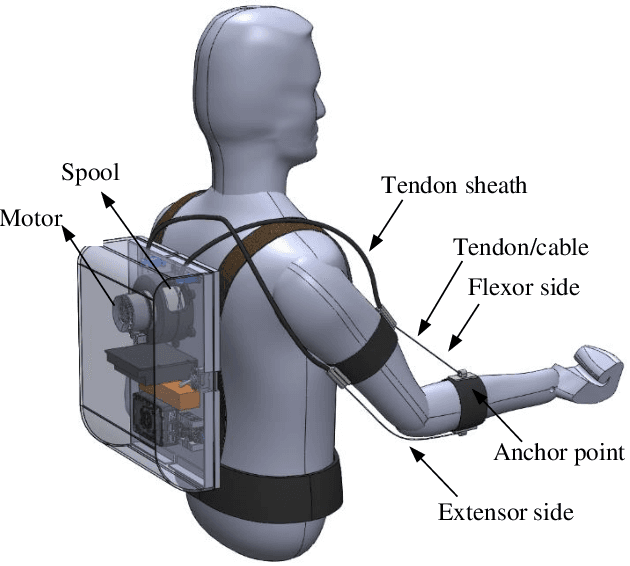
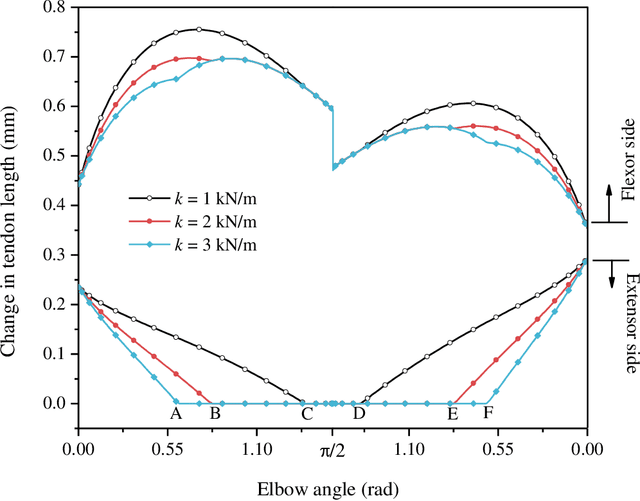
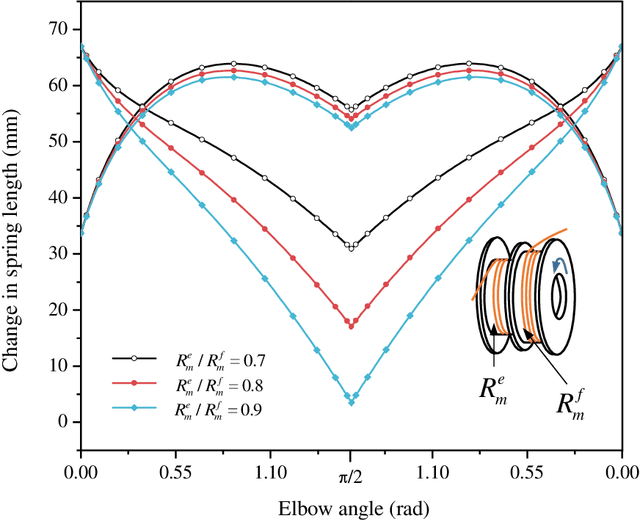
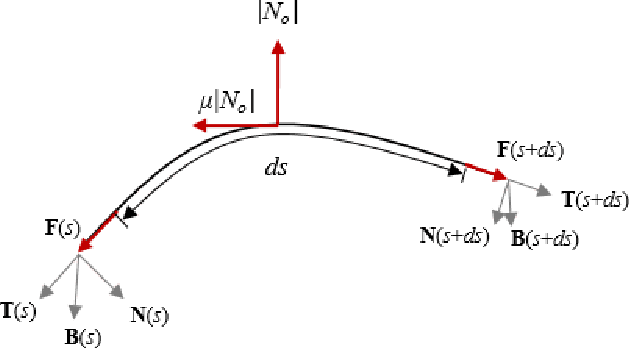
This paper presents an analysis of parametric characterization of a motor driven tendon-sheath actuator system for use in upper limb augmentation for applications such as rehabilitation, therapy, and industrial automation. The double tendon sheath system, which uses two sets of cables (agonist and antagonist side) guided through a sheath, is considered to produce smooth and natural-looking movements of the arm. The exoskeleton is equipped with a single motor capable of controlling both the flexion and extension motions. One of the key challenges in the implementation of a double tendon sheath system is the possibility of slack in the tendon, which can impact the overall performance of the system. To address this issue, a robust mathematical model is developed and a comprehensive parametric study is carried out to determine the most effective strategies for overcoming the problem of slack and improving the transmission. The study suggests that incorporating a series spring into the system's tendon leads to a universally applicable design, eliminating the need for individual customization. The results also show that the slack in the tendon can be effectively controlled by changing the pretension, spring constant, and size and geometry of spool mounted on the axle of motor.
Adaptive Gravity Compensation Control of a Cable-Driven Upper-Arm Soft Exosuit
Apr 28, 2023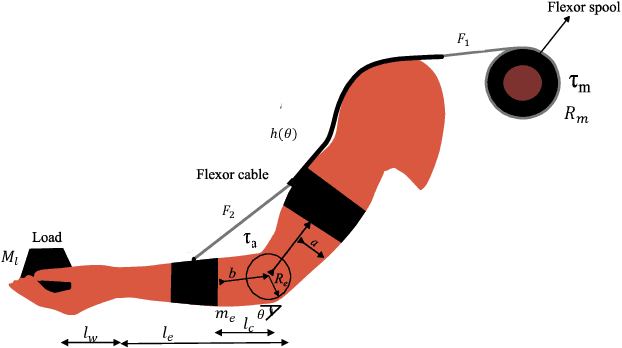
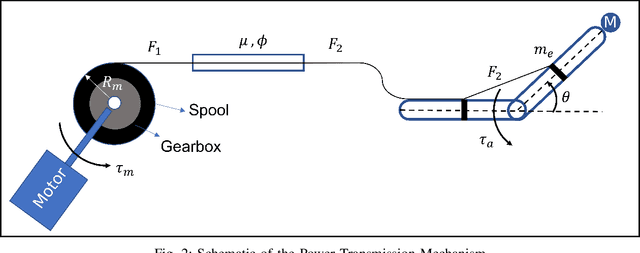
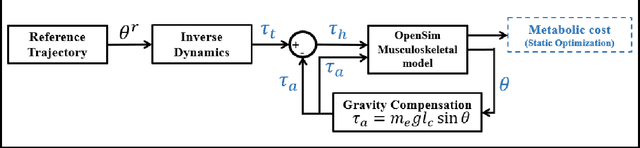
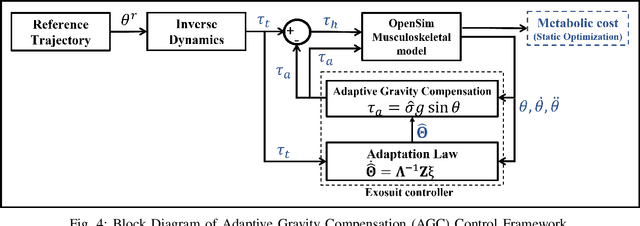
This paper proposes an adaptive gravity compensation (AGC) control strategy for a cable-driven upper-limb exosuit intended to assist the wearer with lifting tasks. Unlike most model-based control techniques used for this human-robot interaction task, the proposed control design does not assume knowledge of the anthropometric parameters of the wearer's arm and the payload. Instead, the uncertainties in human arm parameters, such as mass, length, and payload, are estimated online using an indirect adaptive control law that compensates for the gravity moment about the elbow joint. Additionally, the AGC controller is agnostic to the desired joint trajectory followed by the human arm. For the purpose of controller design, the human arm is modeled using a 1-DOF manipulator model. Further, a cable-driven actuator model is proposed that maps the assistive elbow torque to the actuator torque. The performance of the proposed method is verified through a co-simulation, wherein the control input realized in MATLAB is applied to the human bio-mechanical model in OpenSim under varying payload conditions. Significant reductions in human effort in terms of human muscle torque and metabolic cost are observed with the proposed control strategy. Further, simulation results show that the performance of the AGC controller converges to that of the gravity compensation (GC) controller, demonstrating the efficacy of AGC-based online parameter learning.
BiCurNet: Pre-Movement EEG based Neural Decoder for Biceps Curl Trajectory Estimation
Jan 10, 2023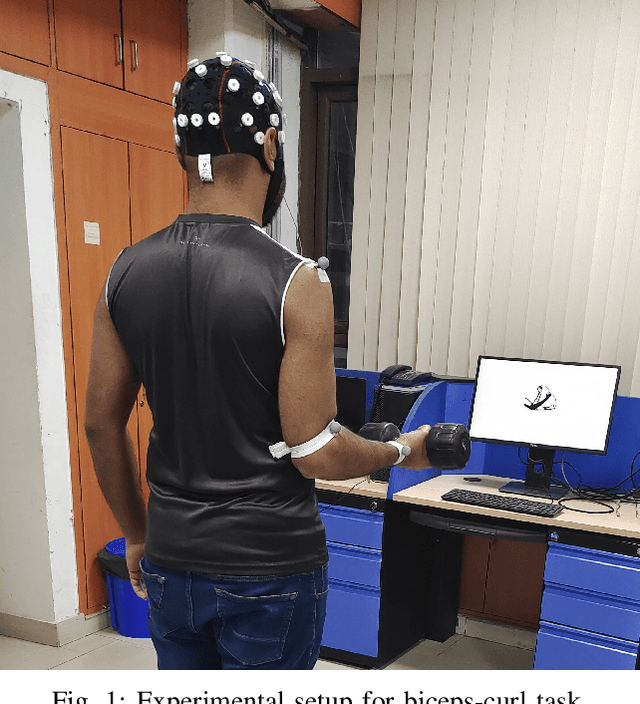

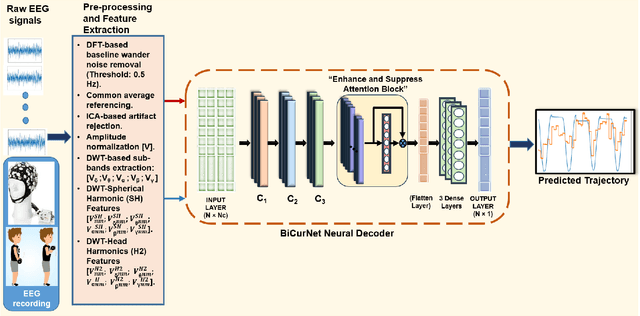

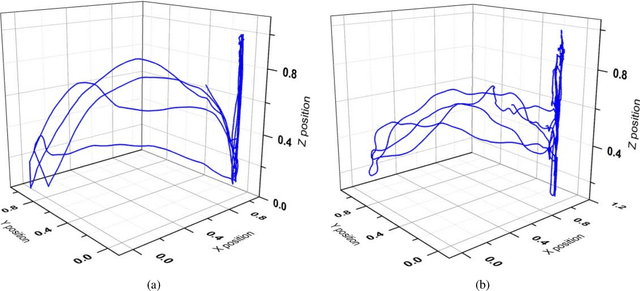
Kinematic parameter (KP) estimation from early electroencephalogram (EEG) signals is essential for positive augmentation using wearable robot. However, work related to early estimation of KPs from surface EEG is sparse. In this work, a deep learning-based model, BiCurNet, is presented for early estimation of biceps curl using collected EEG signal. The model utilizes light-weight architecture with depth-wise separable convolution layers and customized attention module. The feasibility of early estimation of KPs is demonstrated using brain source imaging. Computationally efficient EEG features in spherical and head harmonics domain is utilized for the first time for KP prediction. The best Pearson correlation coefficient (PCC) between estimated and actual trajectory of $0.7$ is achieved when combined EEG features (spatial and harmonics domain) in delta band is utilized. Robustness of the proposed network is demonstrated for subject-dependent and subject-independent training, using EEG signals with artifacts.
Source Aware Deep Learning Framework for Hand Kinematic Reconstruction using EEG Signal
Apr 05, 2021
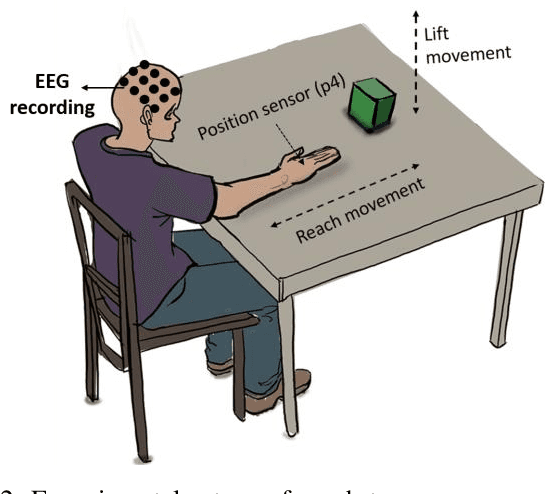
The ability to reconstruct the kinematic parameters of hand movement using non-invasive electroencephalography (EEG) is essential for strength and endurance augmentation using exosuit/exoskeleton. For system development, the conventional classification based brain computer interface (BCI) controls external devices by providing discrete control signals to the actuator. A continuous kinematic reconstruction from EEG signal is better suited for practical BCI applications. The state-of-the-art multi-variable linear regression (mLR) method provides a continuous estimate of hand kinematics, achieving maximum correlation of upto 0.67 between the measured and the estimated hand trajectory. In this work, three novel source aware deep learning models are proposed for motion trajectory prediction (MTP). In particular, multi layer perceptron (MLP), convolutional neural network - long short term memory (CNN-LSTM), and wavelet packet decomposition (WPD) CNN-LSTM are presented. Additional novelty of the work includes utilization of brain source localization (using sLORETA) for the reliable decoding of motor intention mapping (channel selection) and accurate EEG time segment selection. Performance of the proposed models are compared with the traditionally utilised mLR technique on the real grasp and lift (GAL) dataset. Effectiveness of the proposed framework is established using the Pearson correlation coefficient and trajectory analysis. A significant improvement in the correlation coefficient is observed when compared with state-of-the-art mLR model. Our work bridges the gap between the control and the actuator block, enabling real time BCI implementation.