 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Obstacle-Avoiding Control of Planar Snake Robots Exploring Neuro-Evolution of Augmenting Topologies
Nov 15, 2025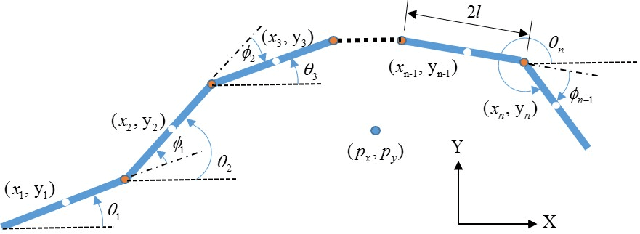
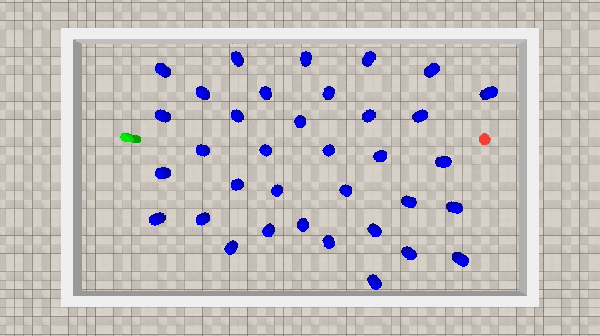
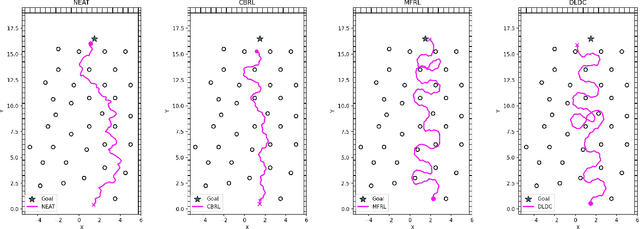
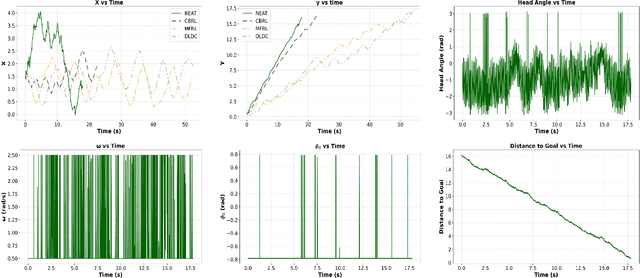
This work aims to develop a resource-efficient solution for obstacle-avoiding tracking control of a planar snake robot in a densely cluttered environment with obstacles. Particularly, Neuro-Evolution of Augmenting Topologies (NEAT) has been employed to generate dynamic gait parameters for the serpenoid gait function, which is implemented on the joint angles of the snake robot, thus controlling the robot on a desired dynamic path. NEAT is a single neural-network based evolutionary algorithm that is known to work extremely well when the input layer is of significantly higher dimension and the output layer is of a smaller size. For the planar snake robot, the input layer consists of the joint angles, link positions, head link position as well as obstacle positions in the vicinity. However, the output layer consists of only the frequency and offset angle of the serpenoid gait that control the speed and heading of the robot, respectively. Obstacle data from a LiDAR and the robot data from various sensors, along with the location of the end goal and time, are employed to parametrize a reward function that is maximized over iterations by selective propagation of superior neural networks. The implementation and experimental results showcase that the proposed approach is computationally efficient, especially for large environments with many obstacles. The proposed framework has been verified through a physics engine simulation study on PyBullet. The approach shows superior results to existing state-of-the-art methodologies and comparable results to the very recent CBRL approach with significantly lower computational overhead. The video of the simulation can be found here: https://sites.google.com/view/neatsnakerobot
LeARN: Learnable and Adaptive Representations for Nonlinear Dynamics in System Identification
Dec 16, 2024System identification, the process of deriving mathematical models of dynamical systems from observed input-output data, has undergone a paradigm shift with the advent of learning-based methods. Addressing the intricate challenges of data-driven discovery in nonlinear dynamical systems, these methods have garnered significant attention. Among them, Sparse Identification of Nonlinear Dynamics (SINDy) has emerged as a transformative approach, distilling complex dynamical behaviors into interpretable linear combinations of basis functions. However, SINDy relies on domain-specific expertise to construct its foundational "library" of basis functions, which limits its adaptability and universality. In this work, we introduce a nonlinear system identification framework called LeARN that transcends the need for prior domain knowledge by learning the library of basis functions directly from data. To enhance adaptability to evolving system dynamics under varying noise conditions, we employ a novel meta-learning-based system identification approach that uses a lightweight deep neural network (DNN) to dynamically refine these basis functions. This not only captures intricate system behaviors but also adapts seamlessly to new dynamical regimes. We validate our framework on the Neural Fly dataset, showcasing its robust adaptation and generalization capabilities. Despite its simplicity, our LeARN achieves competitive dynamical error performance compared to SINDy. This work presents a step toward the autonomous discovery of dynamical systems, paving the way for a future where machine learning uncovers the governing principles of complex systems without requiring extensive domain-specific interventions.
Adaptive Gravity Compensation Control of a Cable-Driven Upper-Arm Soft Exosuit
Apr 28, 2023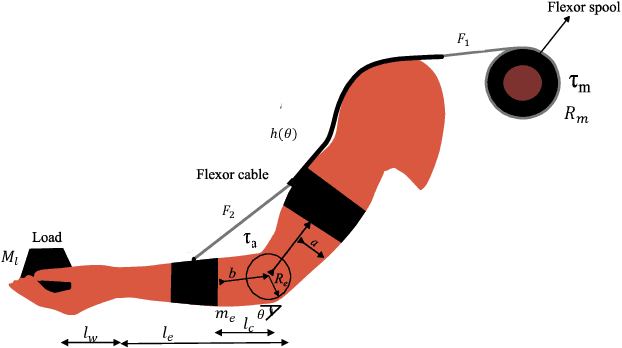
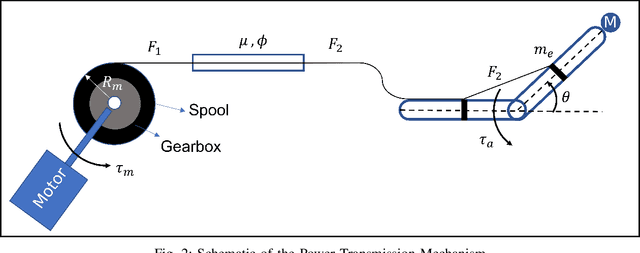
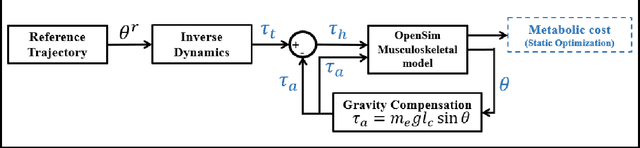
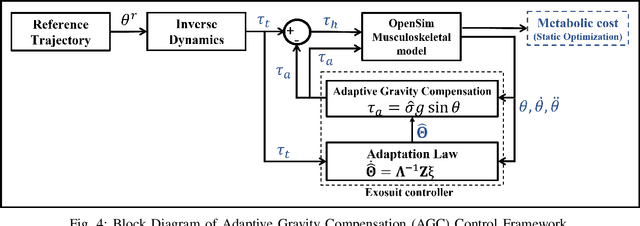
This paper proposes an adaptive gravity compensation (AGC) control strategy for a cable-driven upper-limb exosuit intended to assist the wearer with lifting tasks. Unlike most model-based control techniques used for this human-robot interaction task, the proposed control design does not assume knowledge of the anthropometric parameters of the wearer's arm and the payload. Instead, the uncertainties in human arm parameters, such as mass, length, and payload, are estimated online using an indirect adaptive control law that compensates for the gravity moment about the elbow joint. Additionally, the AGC controller is agnostic to the desired joint trajectory followed by the human arm. For the purpose of controller design, the human arm is modeled using a 1-DOF manipulator model. Further, a cable-driven actuator model is proposed that maps the assistive elbow torque to the actuator torque. The performance of the proposed method is verified through a co-simulation, wherein the control input realized in MATLAB is applied to the human bio-mechanical model in OpenSim under varying payload conditions. Significant reductions in human effort in terms of human muscle torque and metabolic cost are observed with the proposed control strategy. Further, simulation results show that the performance of the AGC controller converges to that of the gravity compensation (GC) controller, demonstrating the efficacy of AGC-based online parameter learning.