 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUPP: Unified Path Planner with Adaptive Safety and Optimality
May 29, 2025We are surrounded by robots helping us perform complex tasks. Robots have a wide range of applications, from industrial automation to personalized assistance. However, with great technological innovation come significant challenges. One of the major challenges in robotics is path planning. Despite advancements such as graph search, sampling, and potential field methods, most path planning algorithms focus either on optimality or on safety. Very little research addresses both simultaneously. We propose a Unified Path Planner (UPP) that uses modified heuristics and a dynamic safety cost function to balance safety and optimality. The level of safety can be adjusted via tunable parameters, trading off against computational complexity. We demonstrate the planner's performance in simulations, showing how parameter variation affects results. UPP is compared with various traditional and safe-optimal planning algorithms across different scenarios. We also validate it on a TurtleBot, where the robot successfully finds safe and sub-optimal paths.
EEG-based 90-Degree Turn Intention Detection for Brain-Computer Interface
Oct 15, 2024Electroencephalography (EEG)--based turn intention prediction for lower limb movement is important to build an efficient brain-computer interface (BCI) system. This study investigates the feasibility of intention detection of left-turn, right-turn, and straight walk by utilizing EEG signals obtained before the event occurrence. Synchronous data was collected using 31-channel EEG and IMU-based motion capture systems for nine healthy participants while performing left-turn, right-turn, and straight walk movements. EEG data was preprocessed with steps including Artifact Subspace Reconstruction (ASR), re-referencing, and Independent Component Analysis (ICA) to remove data noise. Feature extraction from the preprocessed EEG data involved computing various statistical measures (mean, median, standard deviation, skew, and kurtosis), and Hjorth parameters (activity, mobility, and complexity). Further, the feature selection was performed using the Random forest algorithm for the dimensionality reduction. The feature set obtained was utilized for 3-class classification using XG boost, gradient boosting, and support vector machine (SVM) with RBF kernel classifiers in a five-fold cross-validation scheme. Using the proposed intention detection methodology, the SVM classifier using an EEG window of 1.5 s and 0 s time-lag has the best decoding performance with mean accuracy, precision, and recall of 81.23%, 85.35%, and 83.92%, respectively, across the nine participants. The decoding analysis shows the feasibility of turn intention prediction for lower limb movement using the EEG signal before the event onset.
Adaptive Actor-Critic Based Optimal Regulation for Drift-Free Uncertain Nonlinear Systems
Jun 13, 2024In this paper, a continuous-time adaptive actor-critic reinforcement learning (RL) controller is developed for drift-free nonlinear systems. Practical examples of such systems are image-based visual servoing (IBVS) and wheeled mobile robots (WMR), where the system dynamics includes a parametric uncertainty in the control effectiveness matrix with no drift term. The uncertainty in the input term poses a challenge for developing a continuous-time RL controller using existing methods. In this paper, an actor-critic or synchronous policy iteration (PI)-based RL controller is presented with a concurrent learning (CL)-based parameter update law for estimating the unknown parameters of the control effectiveness matrix. An infinite-horizon value function minimization objective is achieved by regulating the current states to the desired with near-optimal control efforts. The proposed controller guarantees closed-loop stability and simulation results validate the proposed theory using IBVS and WMR examples.
Modeling and parametric optimization of 3D tendon-sheath actuator system for upper limb soft exosuit
Jun 30, 2023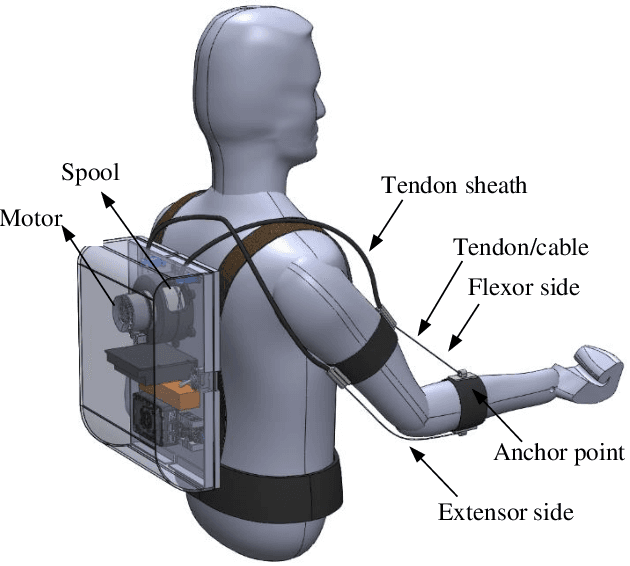
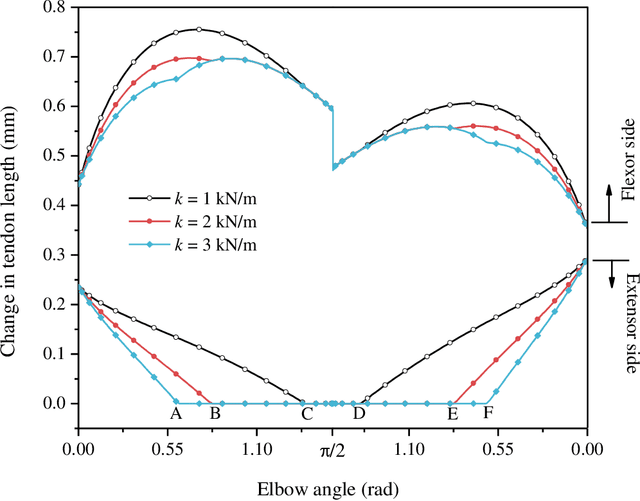
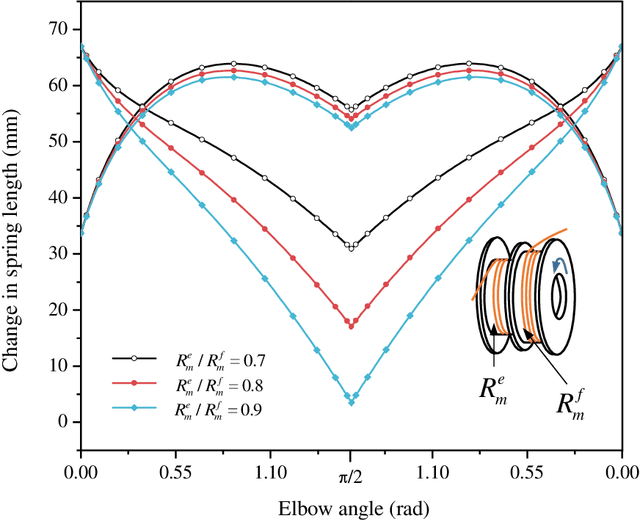
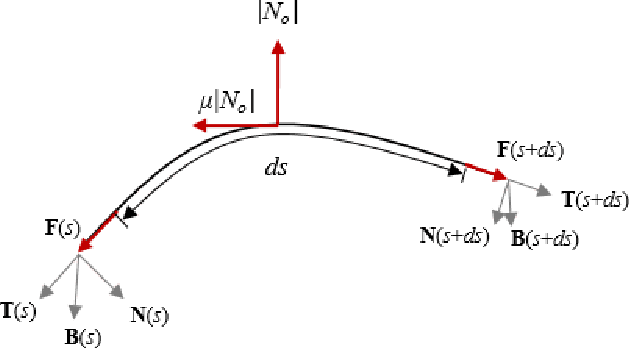
This paper presents an analysis of parametric characterization of a motor driven tendon-sheath actuator system for use in upper limb augmentation for applications such as rehabilitation, therapy, and industrial automation. The double tendon sheath system, which uses two sets of cables (agonist and antagonist side) guided through a sheath, is considered to produce smooth and natural-looking movements of the arm. The exoskeleton is equipped with a single motor capable of controlling both the flexion and extension motions. One of the key challenges in the implementation of a double tendon sheath system is the possibility of slack in the tendon, which can impact the overall performance of the system. To address this issue, a robust mathematical model is developed and a comprehensive parametric study is carried out to determine the most effective strategies for overcoming the problem of slack and improving the transmission. The study suggests that incorporating a series spring into the system's tendon leads to a universally applicable design, eliminating the need for individual customization. The results also show that the slack in the tendon can be effectively controlled by changing the pretension, spring constant, and size and geometry of spool mounted on the axle of motor.
Adaptive Gravity Compensation Control of a Cable-Driven Upper-Arm Soft Exosuit
Apr 28, 2023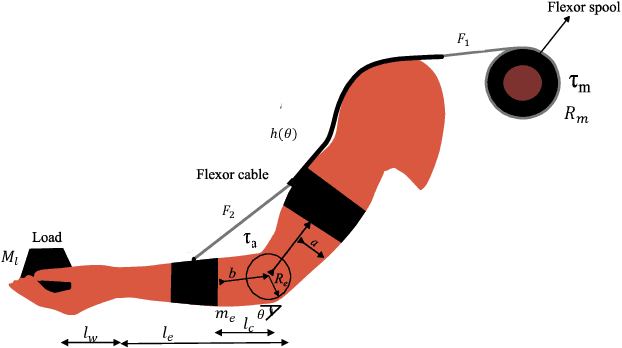
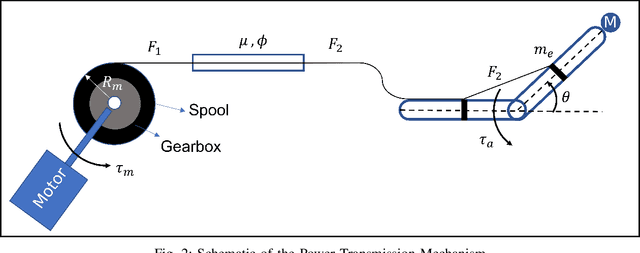
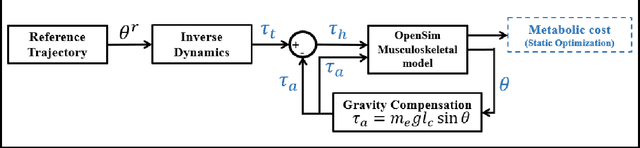
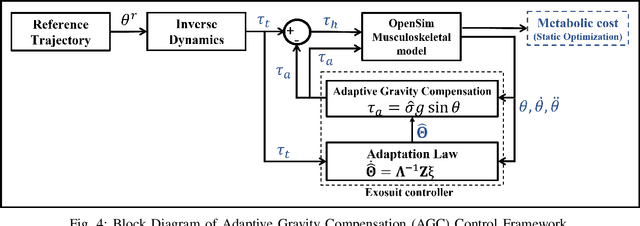
This paper proposes an adaptive gravity compensation (AGC) control strategy for a cable-driven upper-limb exosuit intended to assist the wearer with lifting tasks. Unlike most model-based control techniques used for this human-robot interaction task, the proposed control design does not assume knowledge of the anthropometric parameters of the wearer's arm and the payload. Instead, the uncertainties in human arm parameters, such as mass, length, and payload, are estimated online using an indirect adaptive control law that compensates for the gravity moment about the elbow joint. Additionally, the AGC controller is agnostic to the desired joint trajectory followed by the human arm. For the purpose of controller design, the human arm is modeled using a 1-DOF manipulator model. Further, a cable-driven actuator model is proposed that maps the assistive elbow torque to the actuator torque. The performance of the proposed method is verified through a co-simulation, wherein the control input realized in MATLAB is applied to the human bio-mechanical model in OpenSim under varying payload conditions. Significant reductions in human effort in terms of human muscle torque and metabolic cost are observed with the proposed control strategy. Further, simulation results show that the performance of the AGC controller converges to that of the gravity compensation (GC) controller, demonstrating the efficacy of AGC-based online parameter learning.
BiCurNet: Pre-Movement EEG based Neural Decoder for Biceps Curl Trajectory Estimation
Jan 10, 2023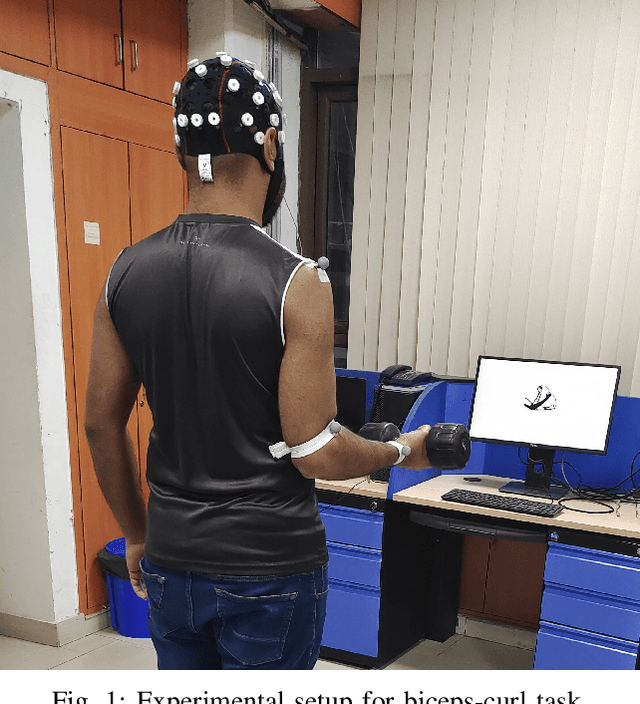

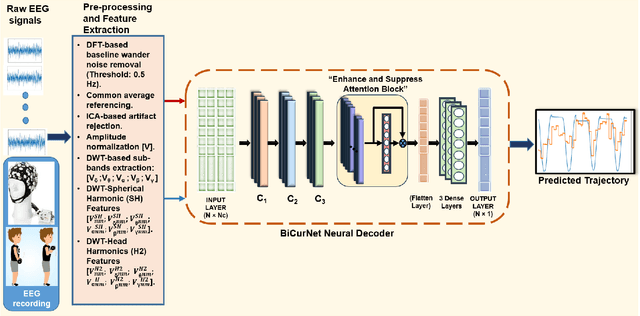

Kinematic parameter (KP) estimation from early electroencephalogram (EEG) signals is essential for positive augmentation using wearable robot. However, work related to early estimation of KPs from surface EEG is sparse. In this work, a deep learning-based model, BiCurNet, is presented for early estimation of biceps curl using collected EEG signal. The model utilizes light-weight architecture with depth-wise separable convolution layers and customized attention module. The feasibility of early estimation of KPs is demonstrated using brain source imaging. Computationally efficient EEG features in spherical and head harmonics domain is utilized for the first time for KP prediction. The best Pearson correlation coefficient (PCC) between estimated and actual trajectory of $0.7$ is achieved when combined EEG features (spatial and harmonics domain) in delta band is utilized. Robustness of the proposed network is demonstrated for subject-dependent and subject-independent training, using EEG signals with artifacts.