 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBiCurNet: Pre-Movement EEG based Neural Decoder for Biceps Curl Trajectory Estimation
Jan 10, 2023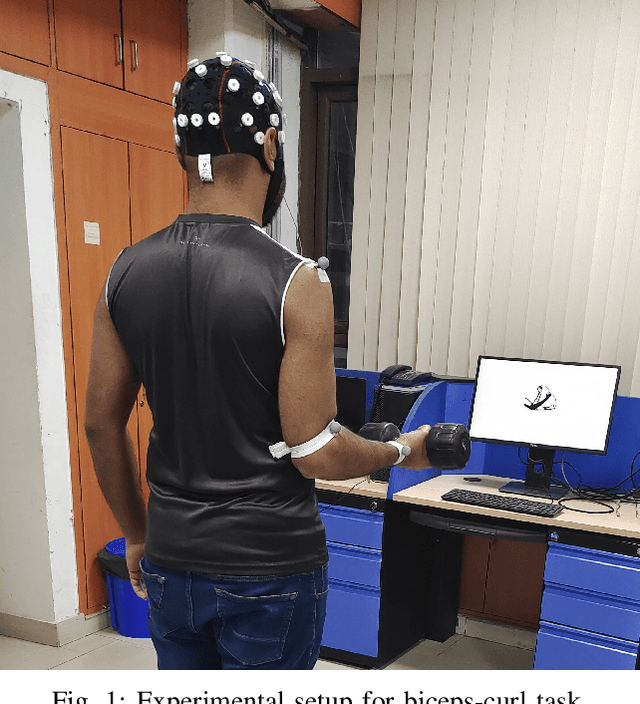

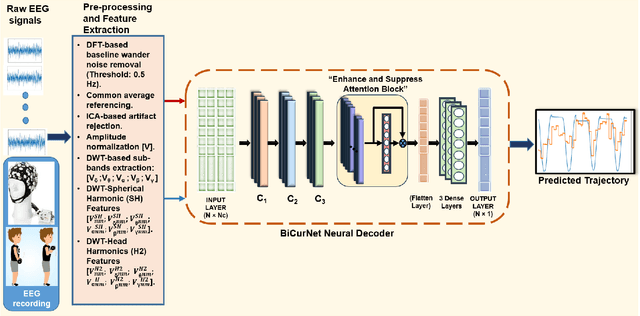

Kinematic parameter (KP) estimation from early electroencephalogram (EEG) signals is essential for positive augmentation using wearable robot. However, work related to early estimation of KPs from surface EEG is sparse. In this work, a deep learning-based model, BiCurNet, is presented for early estimation of biceps curl using collected EEG signal. The model utilizes light-weight architecture with depth-wise separable convolution layers and customized attention module. The feasibility of early estimation of KPs is demonstrated using brain source imaging. Computationally efficient EEG features in spherical and head harmonics domain is utilized for the first time for KP prediction. The best Pearson correlation coefficient (PCC) between estimated and actual trajectory of $0.7$ is achieved when combined EEG features (spatial and harmonics domain) in delta band is utilized. Robustness of the proposed network is demonstrated for subject-dependent and subject-independent training, using EEG signals with artifacts.