 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdvancing Brain-Computer Interface System Performance in Hand Trajectory Estimation with NeuroKinect
Aug 16, 2023



Brain-computer interface (BCI) technology enables direct communication between the brain and external devices, allowing individuals to control their environment using brain signals. However, existing BCI approaches face three critical challenges that hinder their practicality and effectiveness: a) time-consuming preprocessing algorithms, b) inappropriate loss function utilization, and c) less intuitive hyperparameter settings. To address these limitations, we present \textit{NeuroKinect}, an innovative deep-learning model for accurate reconstruction of hand kinematics using electroencephalography (EEG) signals. \textit{NeuroKinect} model is trained on the Grasp and Lift (GAL) tasks data with minimal preprocessing pipelines, subsequently improving the computational efficiency. A notable improvement introduced by \textit{NeuroKinect} is the utilization of a novel loss function, denoted as $\mathcal{L}_{\text{Stat}}$. This loss function addresses the discrepancy between correlation and mean square error in hand kinematics prediction. Furthermore, our study emphasizes the scientific intuition behind parameter selection to enhance accuracy. We analyze the spatial and temporal dynamics of the motor movement task by employing event-related potential and brain source localization (BSL) results. This approach provides valuable insights into the optimal parameter selection, improving the overall performance and accuracy of the \textit{NeuroKinect} model. Our model demonstrates strong correlations between predicted and actual hand movements, with mean Pearson correlation coefficients of 0.92 ($\pm$0.015), 0.93 ($\pm$0.019), and 0.83 ($\pm$0.018) for the X, Y, and Z dimensions. The precision of \textit{NeuroKinect} is evidenced by low mean squared errors (MSE) of 0.016 ($\pm$0.001), 0.015 ($\pm$0.002), and 0.017 ($\pm$0.005) for the X, Y, and Z dimensions, respectively.
An F-ratio-Based Method for Estimating the Number of Active Sources in MEG
Jun 09, 2023



Magnetoencephalography (MEG) is a powerful technique for studying the human brain function. However, accurately estimating the number of sources that contribute to the MEG recordings remains a challenging problem due to the low signal-to-noise ratio (SNR), the presence of correlated sources, inaccuracies in head modeling, and variations in individual anatomy. To address these issues, our study introduces a robust method for accurately estimating the number of active sources in the brain based on the F-ratio statistical approach, which allows for a comparison between a full model with a higher number of sources and a reduced model with fewer sources. Using this approach, we developed a formal statistical procedure that sequentially increases the number of sources in the multiple dipole localization problem until all sources are found. Our results revealed that the selection of thresholds plays a critical role in determining the method`s overall performance, and appropriate thresholds needed to be adjusted for the number of sources and SNR levels, while they remained largely invariant to different inter-source correlations, modeling inaccuracies, and different cortical anatomies. By identifying optimal thresholds and validating our F-ratio-based method in simulated, real phantom, and human MEG data, we demonstrated the superiority of our F-ratio-based method over existing state-of-the-art statistical approaches, such as the Akaike Information Criterion (AIC) and Minimum Description Length (MDL). Overall, when tuned for optimal selection of thresholds, our method offers researchers a precise tool to estimate the true number of active brain sources and accurately model brain function.
Adaptive area-preserving parameterization of open and closed anatomical surfaces
Nov 08, 2021

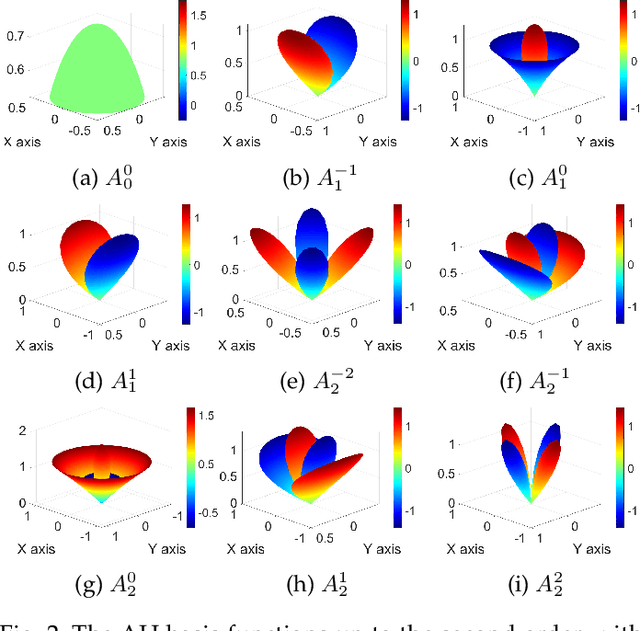
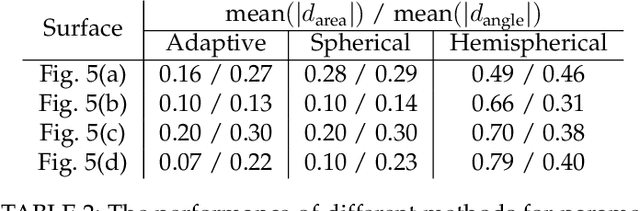
The parameterization of open and closed anatomical surfaces is of fundamental importance in many biomedical applications. Spherical harmonics, a set of basis functions defined on the unit sphere, are widely used for anatomical shape description. However, establishing a one-to-one correspondence between the object surface and the entire unit sphere may induce a large geometric distortion in case the shape of the surface is too different from a perfect sphere. In this work, we propose adaptive area-preserving parameterization methods for simply-connected open and closed surfaces with the target of the parameterization being a spherical cap. Our methods optimize the shape of the parameter domain along with the mapping from the object surface to the parameter domain. The object surface will be globally mapped to an optimal spherical cap region of the unit sphere in an area-preserving manner while also exhibiting low conformal distortion. We further develop a set of spherical harmonics-like basis functions defined over the adaptive spherical cap domain, which we call the adaptive harmonics. Experimental results show that the proposed parameterization methods outperform the existing methods for both open and closed anatomical surfaces in terms of area and angle distortion. Surface description of the object surfaces can be effectively achieved using a novel combination of the adaptive parameterization and the adaptive harmonics. Our work provides a novel way of mapping anatomical surfaces with improved accuracy and greater flexibility. More broadly, the idea of using an adaptive parameter domain allows easy handling of a wide range of biomedical shapes.
Source Aware Deep Learning Framework for Hand Kinematic Reconstruction using EEG Signal
Apr 05, 2021
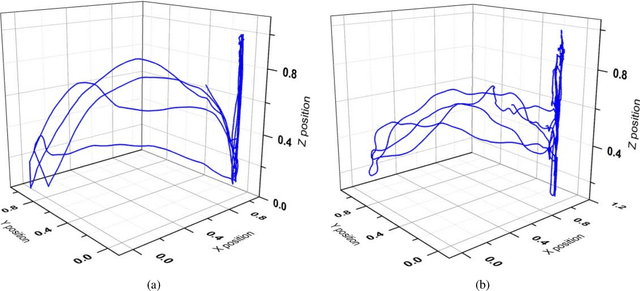
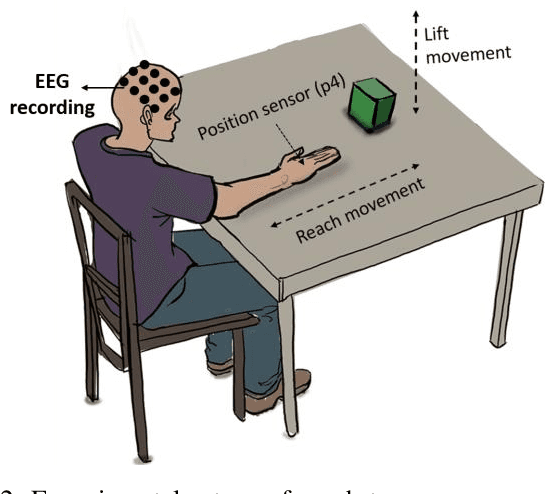
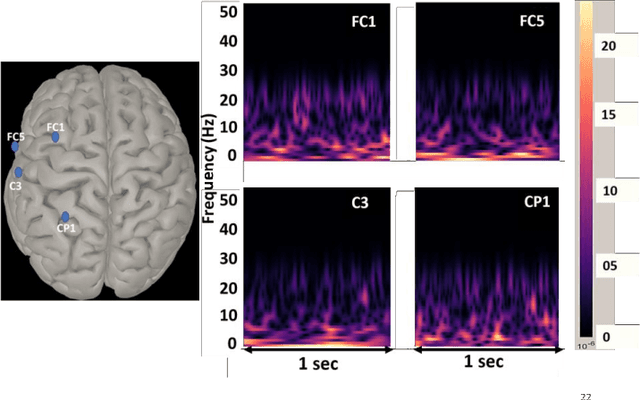
The ability to reconstruct the kinematic parameters of hand movement using non-invasive electroencephalography (EEG) is essential for strength and endurance augmentation using exosuit/exoskeleton. For system development, the conventional classification based brain computer interface (BCI) controls external devices by providing discrete control signals to the actuator. A continuous kinematic reconstruction from EEG signal is better suited for practical BCI applications. The state-of-the-art multi-variable linear regression (mLR) method provides a continuous estimate of hand kinematics, achieving maximum correlation of upto 0.67 between the measured and the estimated hand trajectory. In this work, three novel source aware deep learning models are proposed for motion trajectory prediction (MTP). In particular, multi layer perceptron (MLP), convolutional neural network - long short term memory (CNN-LSTM), and wavelet packet decomposition (WPD) CNN-LSTM are presented. Additional novelty of the work includes utilization of brain source localization (using sLORETA) for the reliable decoding of motor intention mapping (channel selection) and accurate EEG time segment selection. Performance of the proposed models are compared with the traditionally utilised mLR technique on the real grasp and lift (GAL) dataset. Effectiveness of the proposed framework is established using the Pearson correlation coefficient and trajectory analysis. A significant improvement in the correlation coefficient is observed when compared with state-of-the-art mLR model. Our work bridges the gap between the control and the actuator block, enabling real time BCI implementation.