 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLLM-dCache: Improving Tool-Augmented LLMs with GPT-Driven Localized Data Caching
Jun 10, 2024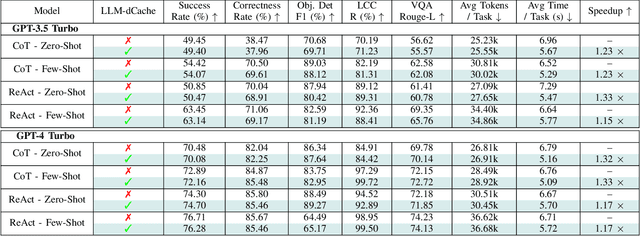


As Large Language Models (LLMs) broaden their capabilities to manage thousands of API calls, they are confronted with complex data operations across vast datasets with significant overhead to the underlying system. In this work, we introduce LLM-dCache to optimize data accesses by treating cache operations as callable API functions exposed to the tool-augmented agent. We grant LLMs the autonomy to manage cache decisions via prompting, seamlessly integrating with existing function-calling mechanisms. Tested on an industry-scale massively parallel platform that spans hundreds of GPT endpoints and terabytes of imagery, our method improves Copilot times by an average of 1.24x across various LLMs and prompting techniques.
Unlearning Climate Misinformation in Large Language Models
May 29, 2024Misinformation regarding climate change is a key roadblock in addressing one of the most serious threats to humanity. This paper investigates factual accuracy in large language models (LLMs) regarding climate information. Using true/false labeled Q&A data for fine-tuning and evaluating LLMs on climate-related claims, we compare open-source models, assessing their ability to generate truthful responses to climate change questions. We investigate the detectability of models intentionally poisoned with false climate information, finding that such poisoning may not affect the accuracy of a model's responses in other domains. Furthermore, we compare the effectiveness of unlearning algorithms, fine-tuning, and Retrieval-Augmented Generation (RAG) for factually grounding LLMs on climate change topics. Our evaluation reveals that unlearning algorithms can be effective for nuanced conceptual claims, despite previous findings suggesting their inefficacy in privacy contexts. These insights aim to guide the development of more factually reliable LLMs and highlight the need for additional work to secure LLMs against misinformation attacks.
Evaluating Zero-Shot GPT-4V Performance on 3D Visual Question Answering Benchmarks
May 29, 2024



As interest in "reformulating" the 3D Visual Question Answering (VQA) problem in the context of foundation models grows, it is imperative to assess how these new paradigms influence existing closed-vocabulary datasets. In this case study, we evaluate the zero-shot performance of foundational models (GPT-4 Vision and GPT-4) on well-established 3D VQA benchmarks, namely 3D-VQA and ScanQA. We provide an investigation to contextualize the performance of GPT-based agents relative to traditional modeling approaches. We find that GPT-based agents without any fine-tuning perform on par with the closed vocabulary approaches. Our findings corroborate recent results that "blind" models establish a surprisingly strong baseline in closed-vocabulary settings. We demonstrate that agents benefit significantly from scene-specific vocabulary via in-context textual grounding. By presenting a preliminary comparison with previous baselines, we hope to inform the community's ongoing efforts to refine multi-modal 3D benchmarks.
GeckOpt: LLM System Efficiency via Intent-Based Tool Selection
Apr 24, 2024

In this preliminary study, we investigate a GPT-driven intent-based reasoning approach to streamline tool selection for large language models (LLMs) aimed at system efficiency. By identifying the intent behind user prompts at runtime, we narrow down the API toolset required for task execution, reducing token consumption by up to 24.6\%. Early results on a real-world, massively parallel Copilot platform with over 100 GPT-4-Turbo nodes show cost reductions and potential towards improving LLM-based system efficiency.
GeoLLM-Engine: A Realistic Environment for Building Geospatial Copilots
Apr 23, 2024



Geospatial Copilots unlock unprecedented potential for performing Earth Observation (EO) applications through natural language instructions. However, existing agents rely on overly simplified single tasks and template-based prompts, creating a disconnect with real-world scenarios. In this work, we present GeoLLM-Engine, an environment for tool-augmented agents with intricate tasks routinely executed by analysts on remote sensing platforms. We enrich our environment with geospatial API tools, dynamic maps/UIs, and external multimodal knowledge bases to properly gauge an agent's proficiency in interpreting realistic high-level natural language commands and its functional correctness in task completions. By alleviating overheads typically associated with human-in-the-loop benchmark curation, we harness our massively parallel engine across 100 GPT-4-Turbo nodes, scaling to over half a million diverse multi-tool tasks and across 1.1 million satellite images. By moving beyond traditional single-task image-caption paradigms, we investigate state-of-the-art agents and prompting techniques against long-horizon prompts.
Evaluating Tool-Augmented Agents in Remote Sensing Platforms
Apr 23, 2024



Tool-augmented Large Language Models (LLMs) have shown impressive capabilities in remote sensing (RS) applications. However, existing benchmarks assume question-answering input templates over predefined image-text data pairs. These standalone instructions neglect the intricacies of realistic user-grounded tasks. Consider a geospatial analyst: they zoom in a map area, they draw a region over which to collect satellite imagery, and they succinctly ask "Detect all objects here". Where is `here`, if it is not explicitly hardcoded in the image-text template, but instead is implied by the system state, e.g., the live map positioning? To bridge this gap, we present GeoLLM-QA, a benchmark designed to capture long sequences of verbal, visual, and click-based actions on a real UI platform. Through in-depth evaluation of state-of-the-art LLMs over a diverse set of 1,000 tasks, we offer insights towards stronger agents for RS applications.
Stable Diffusion For Aerial Object Detection
Nov 21, 2023



Aerial object detection is a challenging task, in which one major obstacle lies in the limitations of large-scale data collection and the long-tail distribution of certain classes. Synthetic data offers a promising solution, especially with recent advances in diffusion-based methods like stable diffusion (SD). However, the direct application of diffusion methods to aerial domains poses unique challenges: stable diffusion's optimization for rich ground-level semantics doesn't align with the sparse nature of aerial objects, and the extraction of post-synthesis object coordinates remains problematic. To address these challenges, we introduce a synthetic data augmentation framework tailored for aerial images. It encompasses sparse-to-dense region of interest (ROI) extraction to bridge the semantic gap, fine-tuning the diffusion model with low-rank adaptation (LORA) to circumvent exhaustive retraining, and finally, a Copy-Paste method to compose synthesized objects with backgrounds, providing a nuanced approach to aerial object detection through synthetic data.
Sign-OPT: A Query-Efficient Hard-label Adversarial Attack
Sep 28, 2019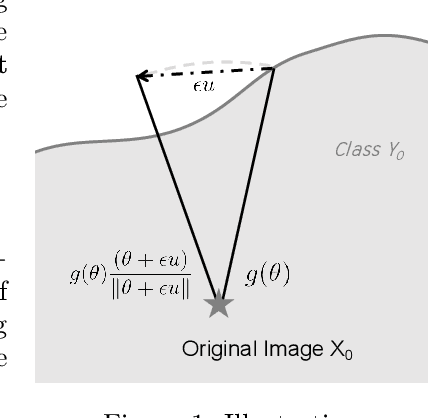
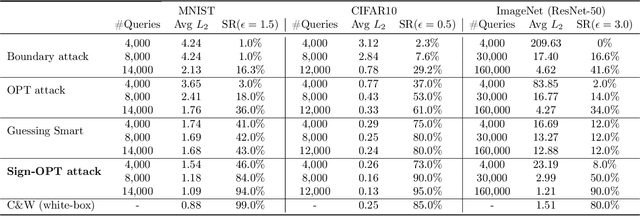
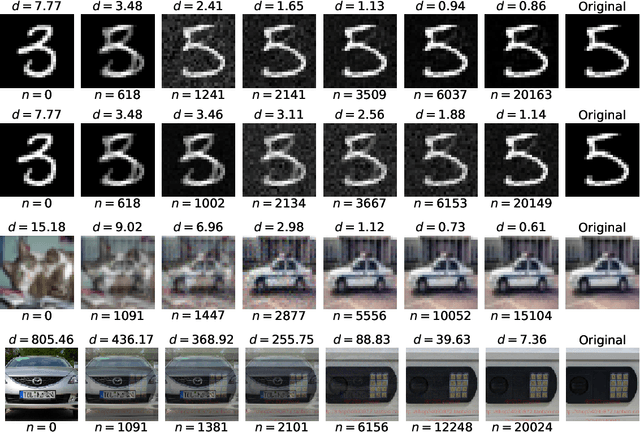
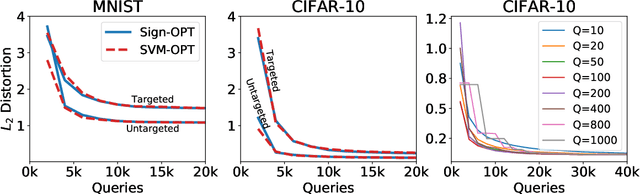
We study the most practical problem setup for evaluating adversarial robustness of a machine learning system with limited access: the hard-label black-box attack setting for generating adversarial examples, where limited model queries are allowed and only the decision is provided to a queried data input. Several algorithms have been proposed for this problem but they typically require huge amount (>20,000) of queries for attacking one example. Among them, one of the state-of-the-art approaches (Cheng et al., 2019) showed that hard-label attack can be modeled as an optimization problem where the objective function can be evaluated by binary search with additional model queries, thereby a zeroth order optimization algorithm can be applied. In this paper, we adopt the same optimization formulation but propose to directly estimate the sign of gradient at any direction instead of the gradient itself, which enjoys the benefit of single query. Using this single query oracle for retrieving sign of directional derivative, we develop a novel query-efficient Sign-OPT approach for hard-label black-box attack. We provide a convergence analysis of the new algorithm and conduct experiments on several models on MNIST, CIFAR-10 and ImageNet. We find that Sign-OPT attack consistently requires 5X to 10X fewer queries when compared to the current state-of-the-art approaches, and usually converges to an adversarial example with smaller perturbation.