 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep learning enables urban change profiling through alignment of historical maps
Feb 02, 2026Prior to modern Earth observation technologies, historical maps provide a unique record of long-term urban transformation and offer a lens on the evolving identity of cities. However, extracting consistent and fine-grained change information from historical map series remains challenging due to spatial misalignment, cartographic variation, and degrading document quality, limiting most analyses to small-scale or qualitative approaches. We propose a fully automated, deep learning-based framework for fine-grained urban change analysis from large collections of historical maps, built on a modular design that integrates dense map alignment, multi-temporal object detection, and change profiling. This framework shifts the analysis of historical maps from ad hoc visual comparison toward systematic, quantitative characterization of urban change. Experiments demonstrate the robust performance of the proposed alignment and object detection methods. Applied to Paris between 1868 and 1937, the framework reveals the spatial and temporal heterogeneity in urban transformation, highlighting its relevance for research in the social sciences and humanities. The modular design of our framework further supports adaptation to diverse cartographic contexts and downstream applications.
Generative AI in Map-Making: A Technical Exploration and Its Implications for Cartographers
Aug 26, 2025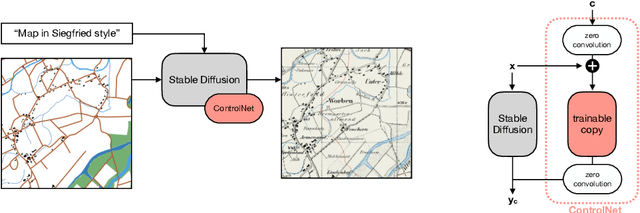
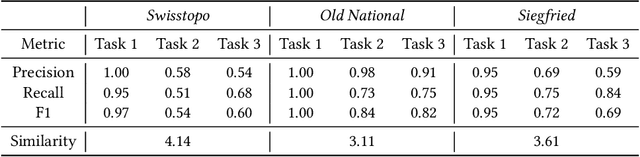
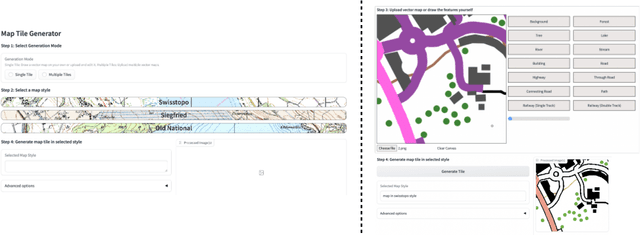
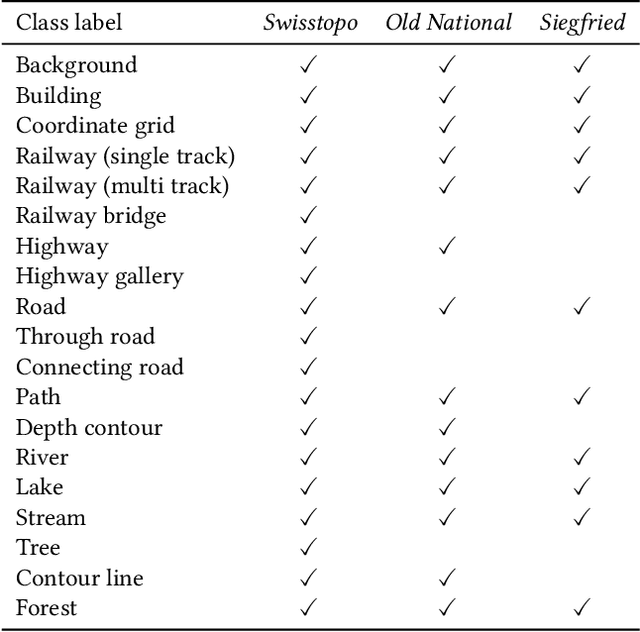
Traditional map-making relies heavily on Geographic Information Systems (GIS), requiring domain expertise and being time-consuming, especially for repetitive tasks. Recent advances in generative AI (GenAI), particularly image diffusion models, offer new opportunities for automating and democratizing the map-making process. However, these models struggle with accurate map creation due to limited control over spatial composition and semantic layout. To address this, we integrate vector data to guide map generation in different styles, specified by the textual prompts. Our model is the first to generate accurate maps in controlled styles, and we have integrated it into a web application to improve its usability and accessibility. We conducted a user study with professional cartographers to assess the fidelity of generated maps, the usability of the web application, and the implications of ever-emerging GenAI in map-making. The findings have suggested the potential of our developed application and, more generally, the GenAI models in helping both non-expert users and professionals in creating maps more efficiently. We have also outlined further technical improvements and emphasized the new role of cartographers to advance the paradigm of AI-assisted map-making.
A roadmap for generative mapping: unlocking the power of generative AI for map-making
Oct 21, 2024Maps are broadly relevant across various fields, serving as valuable tools for presenting spatial phenomena and communicating spatial knowledge. However, map-making is still largely confined to those with expertise in GIS and cartography due to the specialized software and complex workflow involved, from data processing to visualization. While generative AI has recently demonstrated its remarkable capability in creating various types of content and its wide accessibility to the general public, its potential in generating maps is yet to be fully realized. This paper highlights the key applications of generative AI in map-making, summarizes recent advancements in generative AI, identifies the specific technologies required and the challenges of using current methods, and provides a roadmap for developing a generative mapping system (GMS) to make map-making more accessible.
An Efficient System for Automatic Map Storytelling -- A Case Study on Historical Maps
Oct 21, 2024



Historical maps provide valuable information and knowledge about the past. However, as they often feature non-standard projections, hand-drawn styles, and artistic elements, it is challenging for non-experts to identify and interpret them. While existing image captioning methods have achieved remarkable success on natural images, their performance on maps is suboptimal as maps are underrepresented in their pre-training process. Despite the recent advance of GPT-4 in text recognition and map captioning, it still has a limited understanding of maps, as its performance wanes when texts (e.g., titles and legends) in maps are missing or inaccurate. Besides, it is inefficient or even impractical to fine-tune the model with users' own datasets. To address these problems, we propose a novel and lightweight map-captioning counterpart. Specifically, we fine-tune the state-of-the-art vision-language model CLIP to generate captions relevant to historical maps and enrich the captions with GPT-3.5 to tell a brief story regarding where, what, when and why of a given map. We propose a novel decision tree architecture to only generate captions relevant to the specified map type. Our system shows invariance to text alterations in maps. The system can be easily adapted and extended to other map types and scaled to a larger map captioning system. The code is open-sourced at https://github.com/claudaff/automatic-map-storytelling.
StegoGAN: Leveraging Steganography for Non-Bijective Image-to-Image Translation
Mar 29, 2024



Most image-to-image translation models postulate that a unique correspondence exists between the semantic classes of the source and target domains. However, this assumption does not always hold in real-world scenarios due to divergent distributions, different class sets, and asymmetrical information representation. As conventional GANs attempt to generate images that match the distribution of the target domain, they may hallucinate spurious instances of classes absent from the source domain, thereby diminishing the usefulness and reliability of translated images. CycleGAN-based methods are also known to hide the mismatched information in the generated images to bypass cycle consistency objectives, a process known as steganography. In response to the challenge of non-bijective image translation, we introduce StegoGAN, a novel model that leverages steganography to prevent spurious features in generated images. Our approach enhances the semantic consistency of the translated images without requiring additional postprocessing or supervision. Our experimental evaluations demonstrate that StegoGAN outperforms existing GAN-based models across various non-bijective image-to-image translation tasks, both qualitatively and quantitatively. Our code and pretrained models are accessible at https://github.com/sian-wusidi/StegoGAN.
A Physics-driven GraphSAGE Method for Physical Process Simulations Described by Partial Differential Equations
Mar 13, 2024Physics-informed neural networks (PINNs) have successfully addressed various computational physics problems based on partial differential equations (PDEs). However, while tackling issues related to irregularities like singularities and oscillations, trained solutions usually suffer low accuracy. In addition, most current works only offer the trained solution for predetermined input parameters. If any change occurs in input parameters, transfer learning or retraining is required, and traditional numerical techniques also need an independent simulation. In this work, a physics-driven GraphSAGE approach (PD-GraphSAGE) based on the Galerkin method and piecewise polynomial nodal basis functions is presented to solve computational problems governed by irregular PDEs and to develop parametric PDE surrogate models. This approach employs graph representations of physical domains, thereby reducing the demands for evaluated points due to local refinement. A distance-related edge feature and a feature mapping strategy are devised to help training and convergence for singularity and oscillation situations, respectively. The merits of the proposed method are demonstrated through a couple of cases. Moreover, the robust PDE surrogate model for heat conduction problems parameterized by the Gaussian random field source is successfully established, which not only provides the solution accurately but is several times faster than the finite element method in our experiments.
Functional Autoencoder for Smoothing and Representation Learning
Jan 17, 2024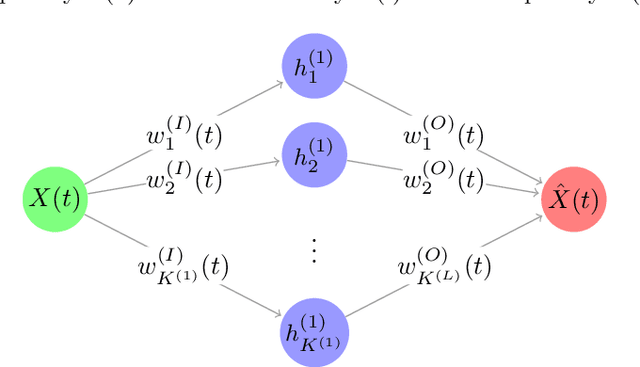
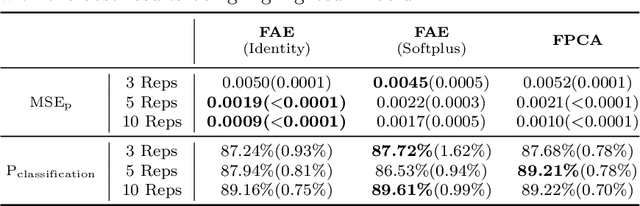
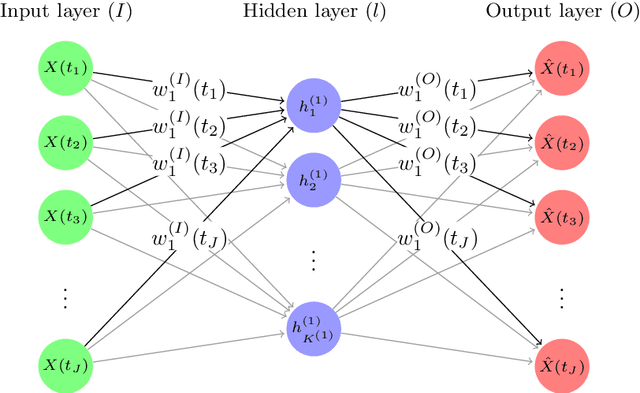
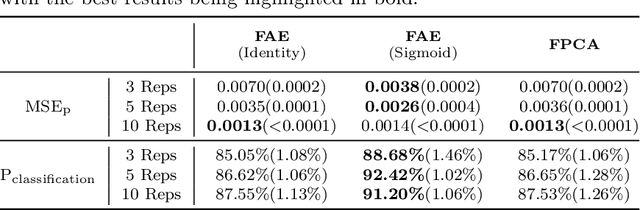
A common pipeline in functional data analysis is to first convert the discretely observed data to smooth functions, and then represent the functions by a finite-dimensional vector of coefficients summarizing the information. Existing methods for data smoothing and dimensional reduction mainly focus on learning the linear mappings from the data space to the representation space, however, learning only the linear representations may not be sufficient. In this study, we propose to learn the nonlinear representations of functional data using neural network autoencoders designed to process data in the form it is usually collected without the need of preprocessing. We design the encoder to employ a projection layer computing the weighted inner product of the functional data and functional weights over the observed timestamp, and the decoder to apply a recovery layer that maps the finite-dimensional vector extracted from the functional data back to functional space using a set of predetermined basis functions. The developed architecture can accommodate both regularly and irregularly spaced data. Our experiments demonstrate that the proposed method outperforms functional principal component analysis in terms of prediction and classification, and maintains superior smoothing ability and better computational efficiency in comparison to the conventional autoencoders under both linear and nonlinear settings.
Cross-attention Spatio-temporal Context Transformer for Semantic Segmentation of Historical Maps
Oct 19, 2023



Historical maps provide useful spatio-temporal information on the Earth's surface before modern earth observation techniques came into being. To extract information from maps, neural networks, which gain wide popularity in recent years, have replaced hand-crafted map processing methods and tedious manual labor. However, aleatoric uncertainty, known as data-dependent uncertainty, inherent in the drawing/scanning/fading defects of the original map sheets and inadequate contexts when cropping maps into small tiles considering the memory limits of the training process, challenges the model to make correct predictions. As aleatoric uncertainty cannot be reduced even with more training data collected, we argue that complementary spatio-temporal contexts can be helpful. To achieve this, we propose a U-Net-based network that fuses spatio-temporal features with cross-attention transformers (U-SpaTem), aggregating information at a larger spatial range as well as through a temporal sequence of images. Our model achieves a better performance than other state-or-art models that use either temporal or spatial contexts. Compared with pure vision transformers, our model is more lightweight and effective. To the best of our knowledge, leveraging both spatial and temporal contexts have been rarely explored before in the segmentation task. Even though our application is on segmenting historical maps, we believe that the method can be transferred into other fields with similar problems like temporal sequences of satellite images. Our code is freely accessible at https://github.com/chenyizi086/wu.2023.sigspatial.git.
Neural Networks for Scalar Input and Functional Output
Aug 10, 2022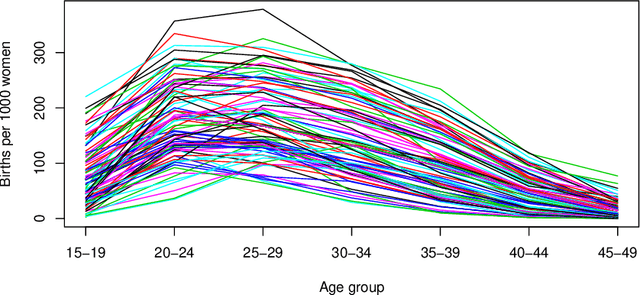
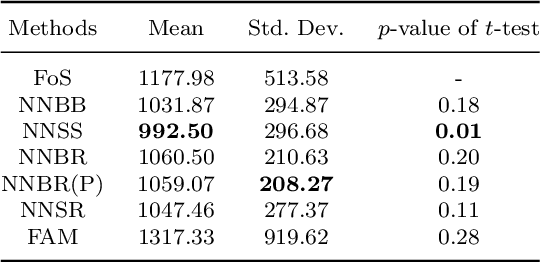
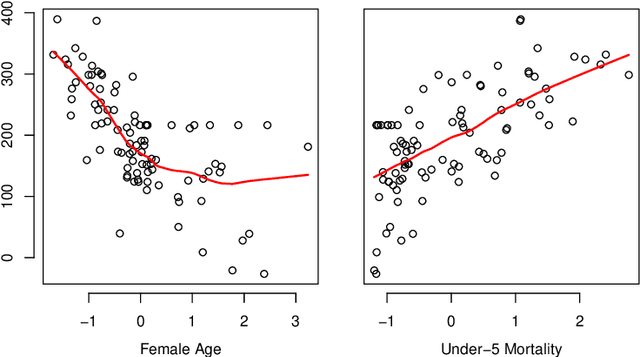
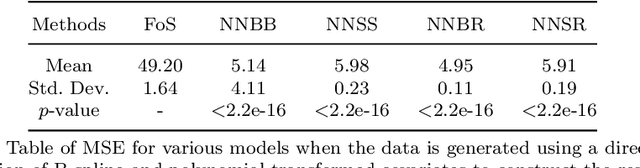
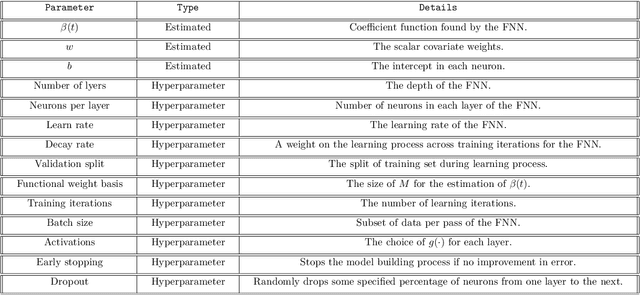
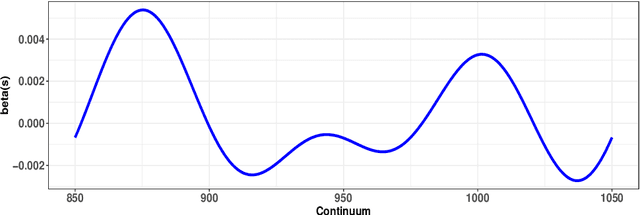
The regression of a functional response on a set of scalar predictors can be a challenging task, especially if there is a large number of predictors, these predictors have interaction effects, or the relationship between those predictors and the response is nonlinear. In this work, we propose a solution to this problem: a feed-forward neural network (NN) designed to predict a functional response using scalar inputs. First, we transform the functional response to a finite-dimension representation and then we construct a NN that outputs this representation. We proposed different objective functions to train the NN. The proposed models are suited for both regularly and irregularly spaced data and also provide multiple ways to apply a roughness penalty to control the smoothness of the predicted curve. The difficulty in implementing both those features lies in the definition of objective functions that can be back-propagated. In our experiments, we demonstrate that our model outperforms the conventional function-on-scalar regression model in multiple scenarios while computationally scaling better with the dimension of the predictors.
FuncNN: An R Package to Fit Deep Neural Networks Using Generalized Input Spaces
Sep 22, 2020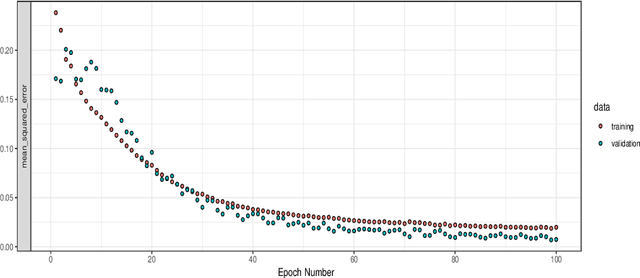

Neural networks have excelled at regression and classification problems when the input space consists of scalar variables. As a result of this proficiency, several popular packages have been developed that allow users to easily fit these kinds of models. However, the methodology has excluded the use of functional covariates and to date, there exists no software that allows users to build deep learning models with this generalized input space. To the best of our knowledge, the functional neural network (FuncNN) library is the first such package in any programming language; the library has been developed for R and is built on top of the keras architecture. Throughout this paper, several functions are introduced that provide users an avenue to easily build models, generate predictions, and run cross-validations. A summary of the underlying methodology is also presented. The ultimate contribution is a package that provides a set of general modelling and diagnostic tools for data problems in which there exist both functional and scalar covariates.