 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoll-Drop: accounting for observation noise with a single parameter
Apr 25, 2023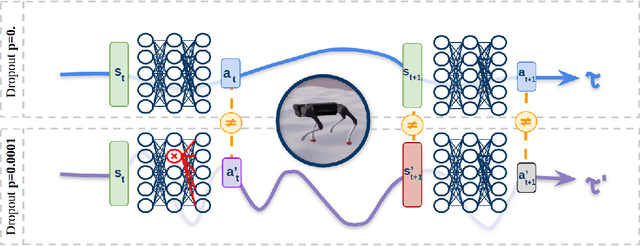
This paper proposes a simple strategy for sim-to-real in Deep-Reinforcement Learning (DRL) -- called Roll-Drop -- that uses dropout during simulation to account for observation noise during deployment without explicitly modelling its distribution for each state. DRL is a promising approach to control robots for highly dynamic and feedback-based manoeuvres, and accurate simulators are crucial to providing cheap and abundant data to learn the desired behaviour. Nevertheless, the simulated data are noiseless and generally show a distributional shift that challenges the deployment on real machines where sensor readings are affected by noise. The standard solution is modelling the latter and injecting it during training; while this requires a thorough system identification, Roll-Drop enhances the robustness to sensor noise by tuning only a single parameter. We demonstrate an 80% success rate when up to 25% noise is injected in the observations, with twice higher robustness than the baselines. We deploy the controller trained in simulation on a Unitree A1 platform and assess this improved robustness on the physical system.
Learning Low-Frequency Motion Control for Robust and Dynamic Robot Locomotion
Sep 29, 2022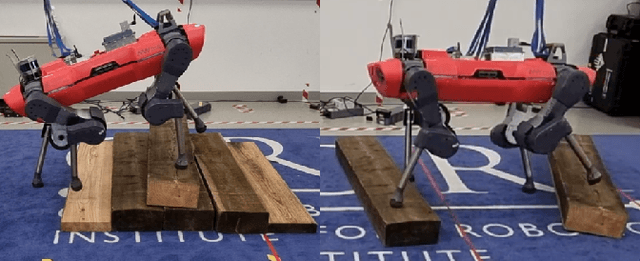
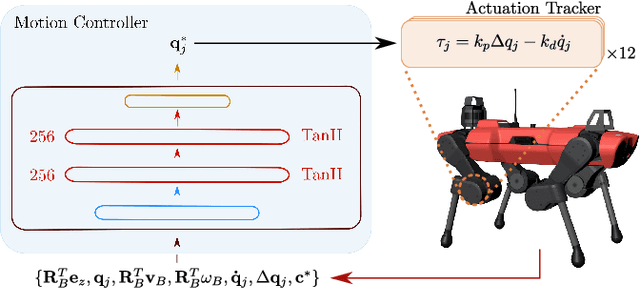
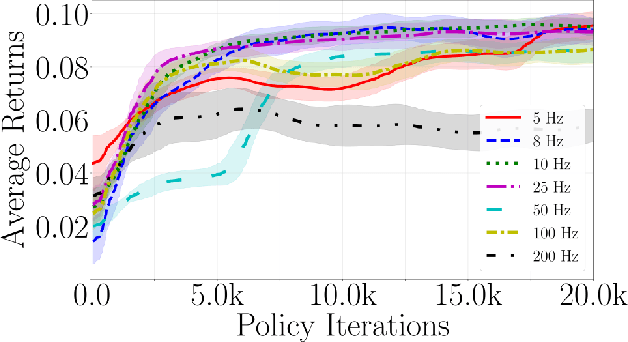
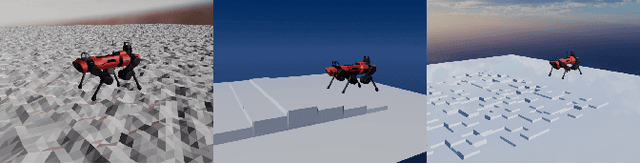
Robotic locomotion is often approached with the goal of maximizing robustness and reactivity by increasing motion control frequency. We challenge this intuitive notion by demonstrating robust and dynamic locomotion with a learned motion controller executing at as low as 8 Hz on a real ANYmal C quadruped. The robot is able to robustly and repeatably achieve a high heading velocity of 1.5 m/s, traverse uneven terrain, and resist unexpected external perturbations. We further present a comparative analysis of deep reinforcement learning (RL) based motion control policies trained and executed at frequencies ranging from 5 Hz to 200 Hz. We show that low-frequency policies are less sensitive to actuation latencies and variations in system dynamics. This is to the extent that a successful sim-to-real transfer can be performed even without any dynamics randomization or actuation modeling. We support this claim through a set of rigorous empirical evaluations. Moreover, to assist reproducibility, we provide the training and deployment code along with an extended analysis at https://ori-drs.github.io/lfmc/.
Learning and Deploying Robust Locomotion Policies with Minimal Dynamics Randomization
Sep 26, 2022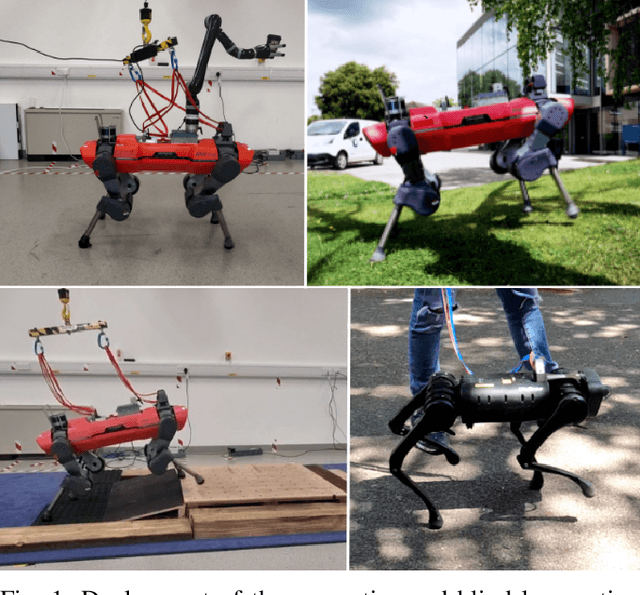
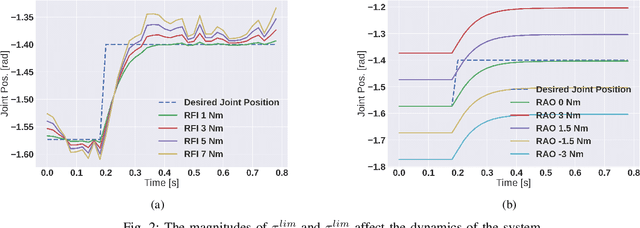
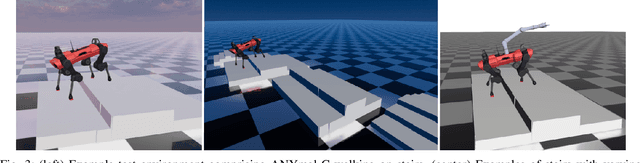
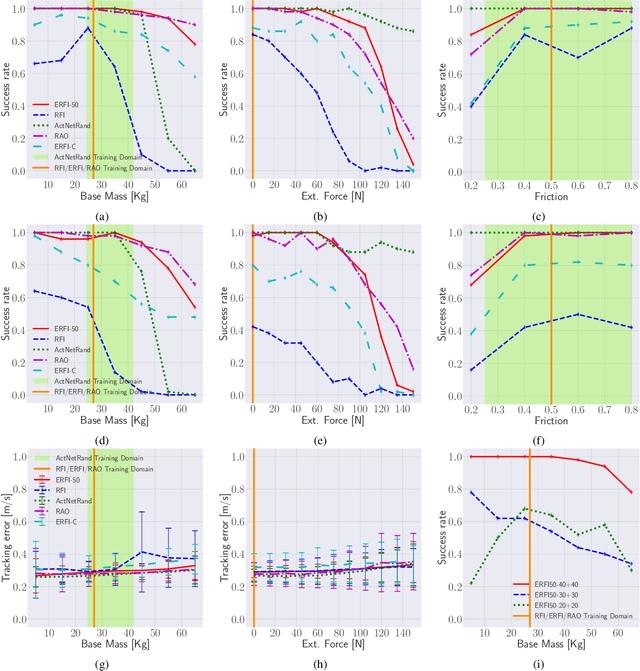
Training deep reinforcement learning (DRL) locomotion policies often requires massive amounts of data to converge to the desired behavior. In this regard, simulators provide a cheap and abundant source. For successful sim-to-real transfer, exhaustively engineered approaches such as system identification, dynamics randomization, and domain adaptation are generally employed. As an alternative, we investigate a simple strategy of random force injection (RFI) to perturb system dynamics during training. We show that the application of random forces enables us to emulate dynamics randomization.This allows us to obtain locomotion policies that are robust to variations in system dynamics. We further extend RFI, referred to as extended random force injection (ERFI), by introducing an episodic actuation offset. We demonstrate that ERFI provides additional robustness for variations in system mass offering on average a 61% improved performance over RFI. We also show that ERFI is sufficient to perform a successful sim-to-real transfer on two different quadrupedal platforms, ANYmal C and Unitree A1, even for perceptive locomotion over uneven terrain in outdoor environments.
VAE-Loco: Versatile Quadruped Locomotion by Learning a Disentangled Gait Representation
May 02, 2022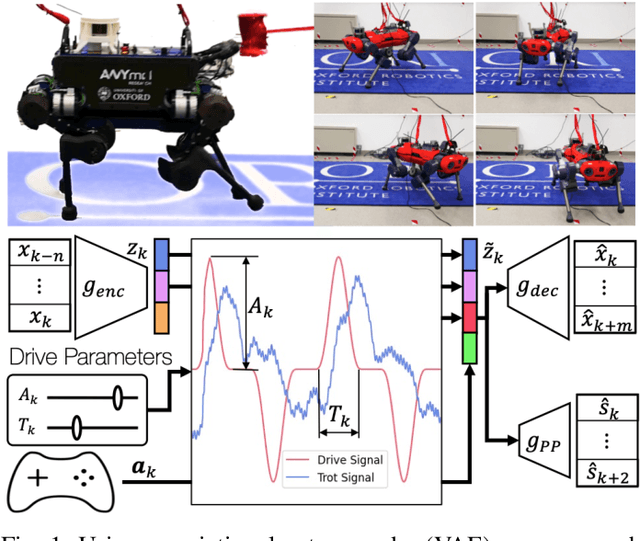
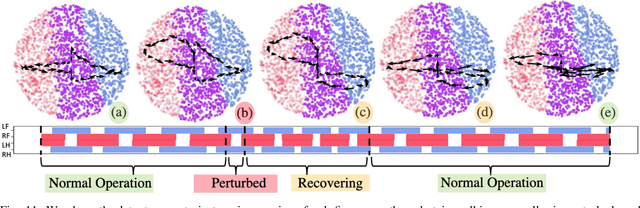
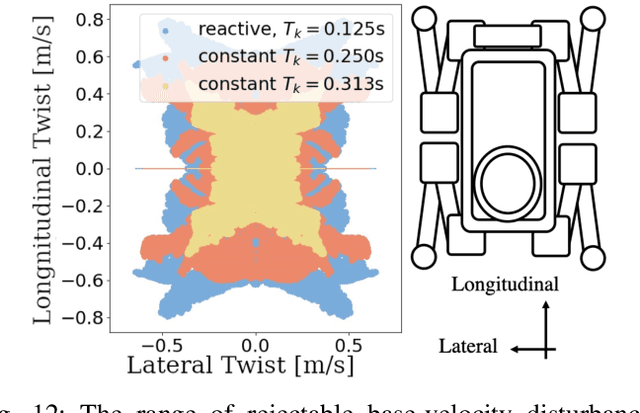
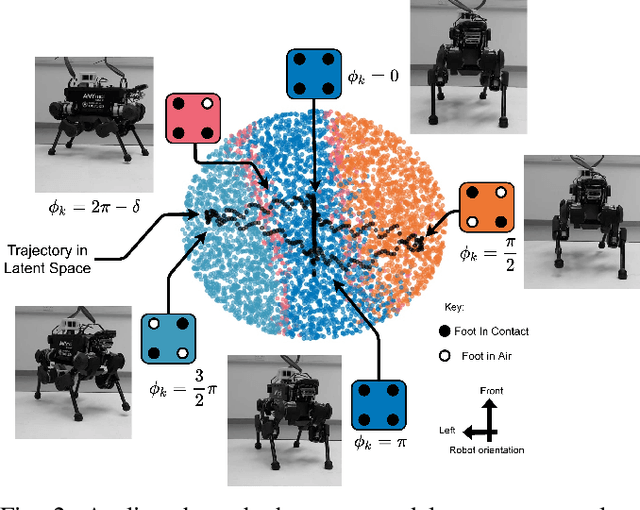
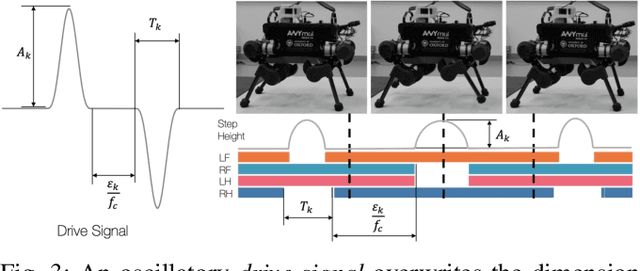
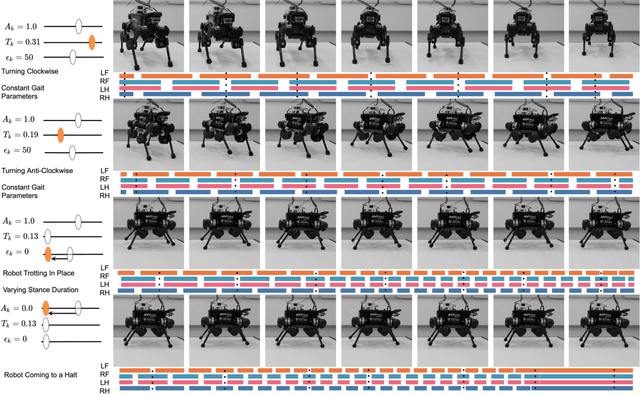
Quadruped locomotion is rapidly maturing to a degree where robots now routinely traverse a variety of unstructured terrains. However, while gaits can be varied typically by selecting from a range of pre-computed styles, current planners are unable to vary key gait parameters continuously while the robot is in motion. The synthesis, on-the-fly, of gaits with unexpected operational characteristics or even the blending of dynamic manoeuvres lies beyond the capabilities of the current state-of-the-art. In this work we address this limitation by learning a latent space capturing the key stance phases constituting a particular gait. This is achieved via a generative model trained on a single trot style, which encourages disentanglement such that application of a drive signal to a single dimension of the latent state induces holistic plans synthesising a continuous variety of trot styles. We demonstrate that specific properties of the drive signal map directly to gait parameters such as cadence, footstep height and full stance duration. Due to the nature of our approach these synthesised gaits are continuously variable online during robot operation and robustly capture a richness of movement significantly exceeding the relatively narrow behaviour seen during training. In addition, the use of a generative model facilitates the detection and mitigation of disturbances to provide a versatile and robust planning framework. We evaluate our approach on two versions of the real ANYmal quadruped robots and demonstrate that our method achieves a continuous blend of dynamic trot styles whilst being robust and reactive to external perturbations.
Next Steps: Learning a Disentangled Gait Representation for Versatile Quadruped Locomotion
Dec 09, 2021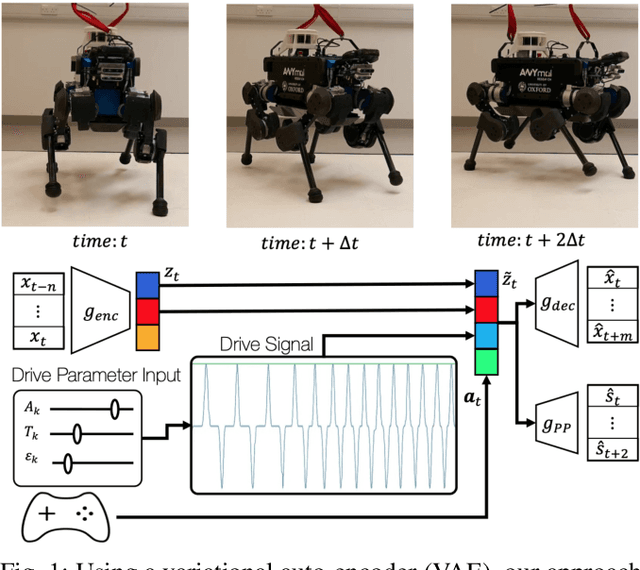
Quadruped locomotion is rapidly maturing to a degree where robots now routinely traverse a variety of unstructured terrains. However, while gaits can be varied typically by selecting from a range of pre-computed styles, current planners are unable to vary key gait parameters continuously while the robot is in motion. The synthesis, on-the-fly, of gaits with unexpected operational characteristics or even the blending of dynamic manoeuvres lies beyond the capabilities of the current state-of-the-art. In this work we address this limitation by learning a latent space capturing the key stance phases constituting a particular gait. This is achieved via a generative model trained on a single trot style, which encourages disentanglement such that application of a drive signal to a single dimension of the latent state induces holistic plans synthesising a continuous variety of trot styles. We demonstrate that specific properties of the drive signal map directly to gait parameters such as cadence, foot step height and full stance duration. Due to the nature of our approach these synthesised gaits are continuously variable online during robot operation and robustly capture a richness of movement significantly exceeding the relatively narrow behaviour seen during training. In addition, the use of a generative model facilitates the detection and mitigation of disturbances to provide a versatile and robust planning framework. We evaluate our approach on a real ANYmal quadruped robot and demonstrate that our method achieves a continuous blend of dynamic trot styles whilst being robust and reactive to external perturbations.
CPG-ACTOR: Reinforcement Learning for Central Pattern Generators
Feb 25, 2021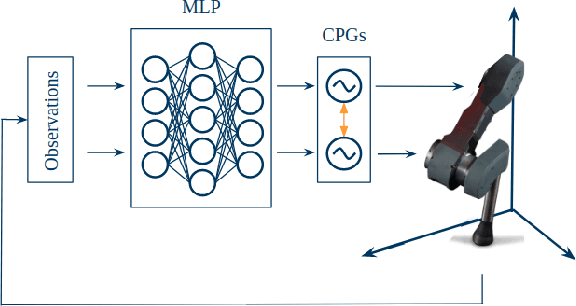
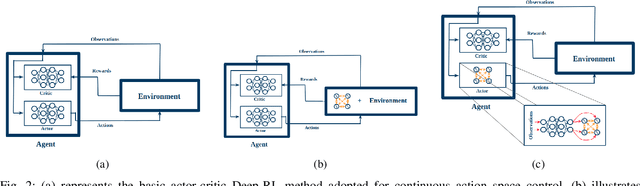
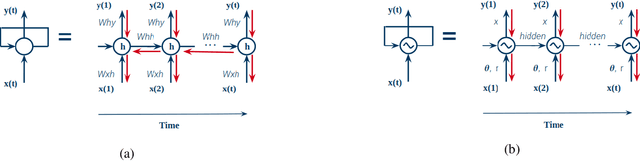
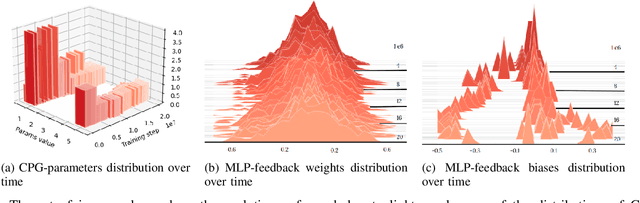
Central Pattern Generators (CPGs) have several properties desirable for locomotion: they generate smooth trajectories, are robust to perturbations and are simple to implement. Although conceptually promising, we argue that the full potential of CPGs has so far been limited by insufficient sensory-feedback information. This paper proposes a new methodology that allows tuning CPG controllers through gradient-based optimization in a Reinforcement Learning (RL) setting. To the best of our knowledge, this is the first time CPGs have been trained in conjunction with a MultilayerPerceptron (MLP) network in a Deep-RL context. In particular, we show how CPGs can directly be integrated as the Actor in an Actor-Critic formulation. Additionally, we demonstrate how this change permits us to integrate highly non-linear feedback directly from sensory perception to reshape the oscillators' dynamics. Our results on a locomotion task using a single-leg hopper demonstrate that explicitly using the CPG as the Actor rather than as part of the environment results in a significant increase in the reward gained over time (6x more) compared with previous approaches. Furthermore, we show that our method without feedback reproduces results similar to prior work with feedback. Finally, we demonstrate how our closed-loop CPG progressively improves the hopping behaviour for longer training epochs relying only on basic reward functions.
RLOC: Terrain-Aware Legged Locomotion using Reinforcement Learning and Optimal Control
Dec 05, 2020



We present a unified model-based and data-driven approach for quadrupedal planning and control to achieve dynamic locomotion over uneven terrain. We utilize on-board proprioceptive and exteroceptive feedback to map sensory information and desired base velocity commands into footstep plans using a reinforcement learning (RL) policy trained in simulation over a wide range of procedurally generated terrains. When ran online, the system tracks the generated footstep plans using a model-based controller. We evaluate the robustness of our method over a wide variety of complex terrains. It exhibits behaviors which prioritize stability over aggressive locomotion. Additionally, we introduce two ancillary RL policies for corrective whole-body motion tracking and recovery control. These policies account for changes in physical parameters and external perturbations. We train and evaluate our framework on a complex quadrupedal system, ANYmal version B, and demonstrate transferability to a larger and heavier robot, ANYmal C, without requiring retraining.
Guided Constrained Policy Optimization for Dynamic Quadrupedal Robot Locomotion
Feb 22, 2020
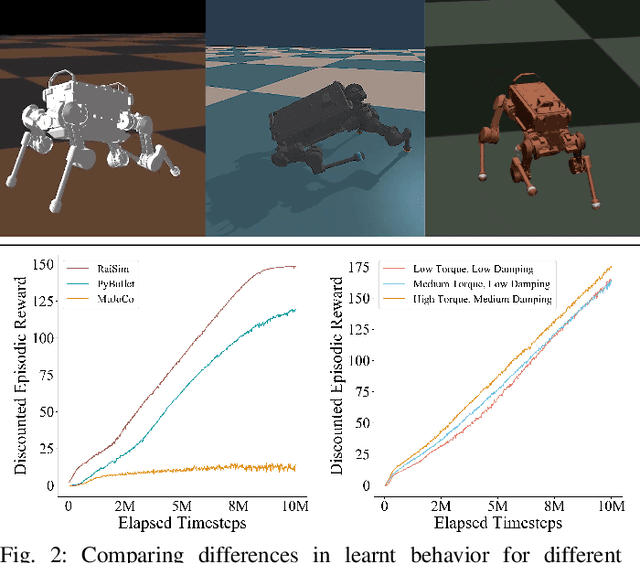
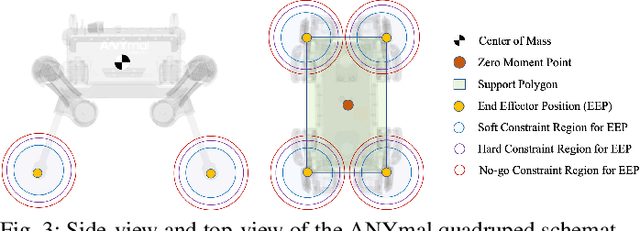
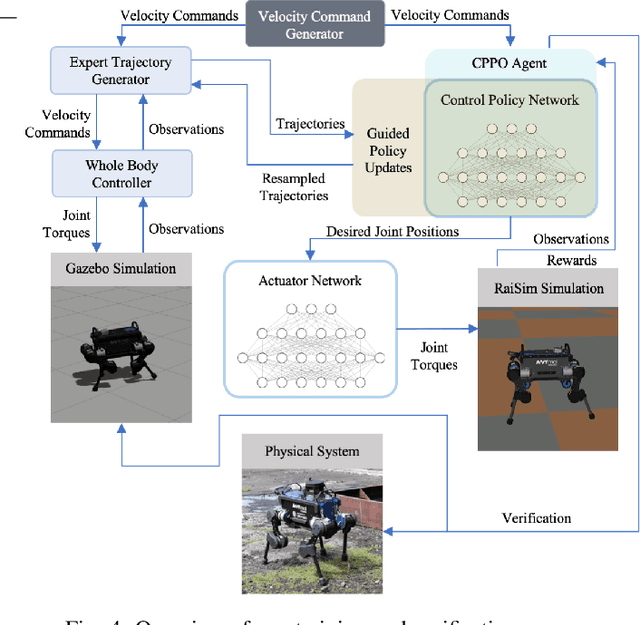
Deep reinforcement learning (RL) uses model-free techniques to optimize task-specific control policies. Despite having emerged as a promising approach for complex problems, RL is still hard to use reliably for real-world applications. Apart from challenges such as precise reward function tuning, inaccurate sensing and actuation, and non-deterministic response, existing RL methods do not guarantee behavior within required safety constraints that are crucial for real robot scenarios. In this regard, we introduce guided constrained policy optimization (GCPO), an RL framework based upon our implementation of constrained proximal policy optimization (CPPO) for tracking base velocity commands while following the defined constraints. We also introduce schemes which encourage state recovery into constrained regions in case of constraint violations. We present experimental results of our training method and test it on the real ANYmal quadruped robot. We compare our approach against the unconstrained RL method and show that guided constrained RL offers faster convergence close to the desired optimum resulting in an optimal, yet physically feasible, robotic control behavior without the need for precise reward function tuning.