 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDexterous Manipulation through Imitation Learning: A Survey
Apr 04, 2025Dexterous manipulation, which refers to the ability of a robotic hand or multi-fingered end-effector to skillfully control, reorient, and manipulate objects through precise, coordinated finger movements and adaptive force modulation, enables complex interactions similar to human hand dexterity. With recent advances in robotics and machine learning, there is a growing demand for these systems to operate in complex and unstructured environments. Traditional model-based approaches struggle to generalize across tasks and object variations due to the high-dimensionality and complex contact dynamics of dexterous manipulation. Although model-free methods such as reinforcement learning (RL) show promise, they require extensive training, large-scale interaction data, and carefully designed rewards for stability and effectiveness. Imitation learning (IL) offers an alternative by allowing robots to acquire dexterous manipulation skills directly from expert demonstrations, capturing fine-grained coordination and contact dynamics while bypassing the need for explicit modeling and large-scale trial-and-error. This survey provides an overview of dexterous manipulation methods based on imitation learning (IL), details recent advances, and addresses key challenges in the field. Additionally, it explores potential research directions to enhance IL-driven dexterous manipulation. Our goal is to offer researchers and practitioners a comprehensive introduction to this rapidly evolving domain.
HIF: Height Interval Filtering for Efficient Dynamic Points Removal
Mar 10, 20253D point cloud mapping plays a essential role in localization and autonomous navigation. However, dynamic objects often leave residual traces during the map construction process, which undermine the performance of subsequent tasks. Therefore, dynamic object removal has become a critical challenge in point cloud based map construction within dynamic scenarios. Existing approaches, however, often incur significant computational overhead, making it difficult to meet the real-time processing requirements. To address this issue, we introduce the Height Interval Filtering (HIF) method. This approach constructs pillar-based height interval representations to probabilistically model the vertical dimension, with interval probabilities updated through Bayesian inference. It ensures real-time performance while achieving high accuracy and improving robustness in complex environments. Additionally, we propose a low-height preservation strategy that enhances the detection of unknown spaces, reducing misclassification in areas blocked by obstacles (occluded regions). Experiments on public datasets demonstrate that HIF delivers a 7.7 times improvement in time efficiency with comparable accuracy to existing SOTA methods. The code will be publicly available.
HyperGraph ROS: An Open-Source Robot Operating System for Hybrid Parallel Computing based on Computational HyperGraph
Mar 07, 2025


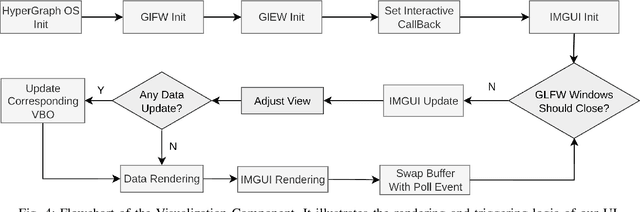
This paper presents HyperGraph ROS, an open-source robot operating system that unifies intra-process, inter-process, and cross-device computation into a computational hypergraph for efficient message passing and parallel execution. In order to optimize communication, HyperGraph ROS dynamically selects the optimal communication mechanism while maintaining a consistent API. For intra-process messages, Intel-TBB Flow Graph is used with C++ pointer passing, which ensures zero memory copying and instant delivery. Meanwhile, inter-process and cross-device communication seamlessly switch to ZeroMQ. When a node receives a message from any source, it is immediately activated and scheduled for parallel execution by Intel-TBB. The computational hypergraph consists of nodes represented by TBB flow graph nodes and edges formed by TBB pointer-based connections for intra-process communication, as well as ZeroMQ links for inter-process and cross-device communication. This structure enables seamless distributed parallelism. Additionally, HyperGraph ROS provides ROS-like utilities such as a parameter server, a coordinate transformation tree, and visualization tools. Evaluation in diverse robotic scenarios demonstrates significantly higher transmission and throughput efficiency compared to ROS 2. Our work is available at https://github.com/wujiazheng2020a/hyper_graph_ros.
A Two-stage Personalized Virtual Try-on Framework with Shape Control and Texture Guidance
Dec 24, 2023The Diffusion model has a strong ability to generate wild images. However, the model can just generate inaccurate images with the guidance of text, which makes it very challenging to directly apply the text-guided generative model for virtual try-on scenarios. Taking images as guiding conditions of the diffusion model, this paper proposes a brand new personalized virtual try-on model (PE-VITON), which uses the two stages (shape control and texture guidance) to decouple the clothing attributes. Specifically, the proposed model adaptively matches the clothing to human body parts through the Shape Control Module (SCM) to mitigate the misalignment of the clothing and the human body parts. The semantic information of the input clothing is parsed by the Texture Guided Module (TGM), and the corresponding texture is generated by directional guidance. Therefore, this model can effectively solve the problems of weak reduction of clothing folds, poor generation effect under complex human posture, blurred edges of clothing, and unclear texture styles in traditional try-on methods. Meanwhile, the model can automatically enhance the generated clothing folds and textures according to the human posture, and improve the authenticity of virtual try-on. In this paper, qualitative and quantitative experiments are carried out on high-resolution paired and unpaired datasets, the results show that the proposed model outperforms the state-of-the-art model.