 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeParsimonious Dataset Construction for Laparoscopic Cholecystectomy Structure Segmentation
Apr 17, 2025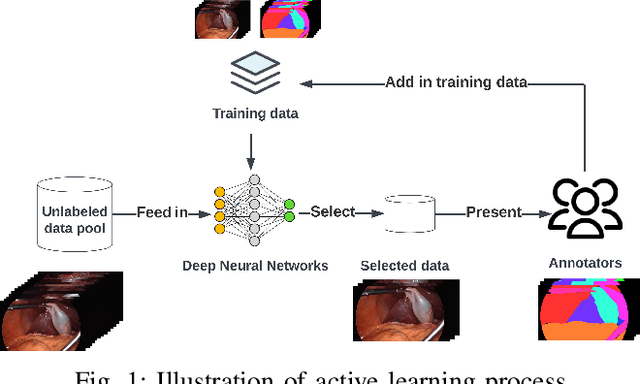
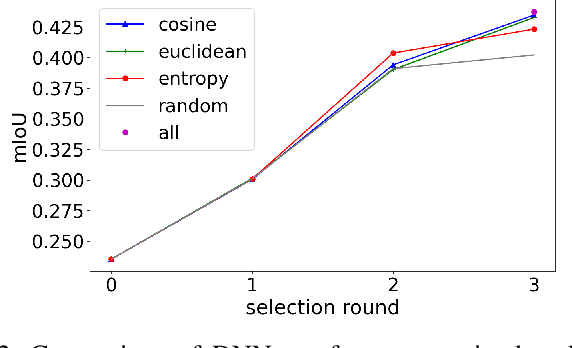
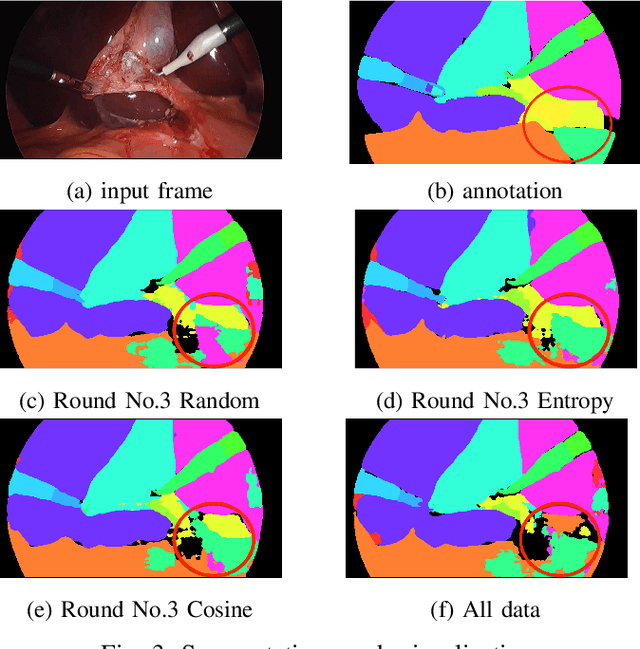
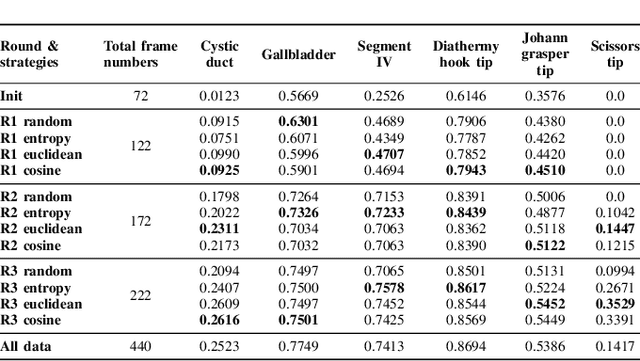
Labeling has always been expensive in the medical context, which has hindered related deep learning application. Our work introduces active learning in surgical video frame selection to construct a high-quality, affordable Laparoscopic Cholecystectomy dataset for semantic segmentation. Active learning allows the Deep Neural Networks (DNNs) learning pipeline to include the dataset construction workflow, which means DNNs trained by existing dataset will identify the most informative data from the newly collected data. At the same time, DNNs' performance and generalization ability improve over time when the newly selected and annotated data are included in the training data. We assessed different data informativeness measurements and found the deep features distances select the most informative data in this task. Our experiments show that with half of the data selected by active learning, the DNNs achieve almost the same performance with 0.4349 mean Intersection over Union (mIoU) compared to the same DNNs trained on the full dataset (0.4374 mIoU) on the critical anatomies and surgical instruments.
Dexterous Manipulation through Imitation Learning: A Survey
Apr 04, 2025Dexterous manipulation, which refers to the ability of a robotic hand or multi-fingered end-effector to skillfully control, reorient, and manipulate objects through precise, coordinated finger movements and adaptive force modulation, enables complex interactions similar to human hand dexterity. With recent advances in robotics and machine learning, there is a growing demand for these systems to operate in complex and unstructured environments. Traditional model-based approaches struggle to generalize across tasks and object variations due to the high-dimensionality and complex contact dynamics of dexterous manipulation. Although model-free methods such as reinforcement learning (RL) show promise, they require extensive training, large-scale interaction data, and carefully designed rewards for stability and effectiveness. Imitation learning (IL) offers an alternative by allowing robots to acquire dexterous manipulation skills directly from expert demonstrations, capturing fine-grained coordination and contact dynamics while bypassing the need for explicit modeling and large-scale trial-and-error. This survey provides an overview of dexterous manipulation methods based on imitation learning (IL), details recent advances, and addresses key challenges in the field. Additionally, it explores potential research directions to enhance IL-driven dexterous manipulation. Our goal is to offer researchers and practitioners a comprehensive introduction to this rapidly evolving domain.
DDA: Dimensionality Driven Augmentation Search for Contrastive Learning in Laparoscopic Surgery
Jun 03, 2024Self-supervised learning (SSL) has potential for effective representation learning in medical imaging, but the choice of data augmentation is critical and domain-specific. It remains uncertain if general augmentation policies suit surgical applications. In this work, we automate the search for suitable augmentation policies through a new method called Dimensionality Driven Augmentation Search (DDA). DDA leverages the local dimensionality of deep representations as a proxy target, and differentiably searches for suitable data augmentation policies in contrastive learning. We demonstrate the effectiveness and efficiency of DDA in navigating a large search space and successfully identifying an appropriate data augmentation policy for laparoscopic surgery. We systematically evaluate DDA across three laparoscopic image classification and segmentation tasks, where it significantly improves over existing baselines. Furthermore, DDA's optimised set of augmentations provides insight into domain-specific dependencies when applying contrastive learning in medical applications. For example, while hue is an effective augmentation for natural images, it is not advantageous for laparoscopic images.