 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVIBES -- Vision Backbone Efficient Selection
Oct 11, 2024



This work tackles the challenge of efficiently selecting high-performance pre-trained vision backbones for specific target tasks. Although exhaustive search within a finite set of backbones can solve this problem, it becomes impractical for large datasets and backbone pools. To address this, we introduce Vision Backbone Efficient Selection (VIBES), which aims to quickly find well-suited backbones, potentially trading off optimality for efficiency. We propose several simple yet effective heuristics to address VIBES and evaluate them across four diverse computer vision datasets. Our results show that these approaches can identify backbones that outperform those selected from generic benchmarks, even within a limited search budget of one hour on a single GPU. We reckon VIBES marks a paradigm shift from benchmarks to task-specific optimization.
A Bayesian Framework for Nash Equilibrium Inference in Human-Robot Parallel Play
Jun 10, 2020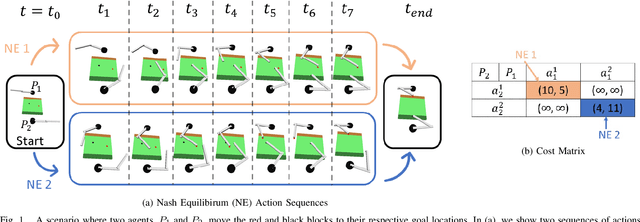

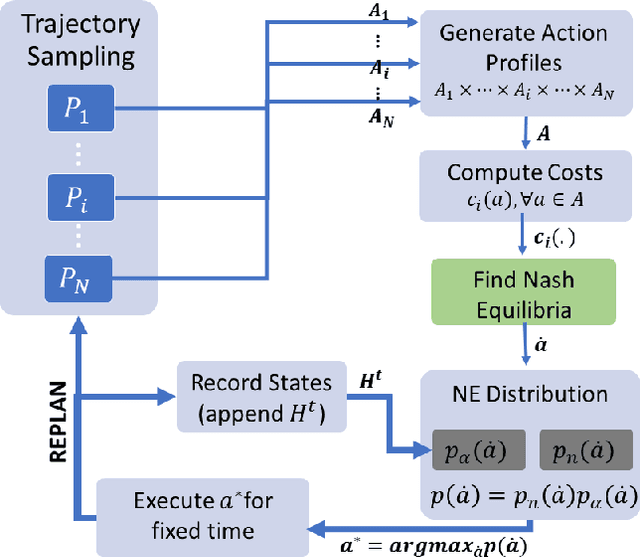

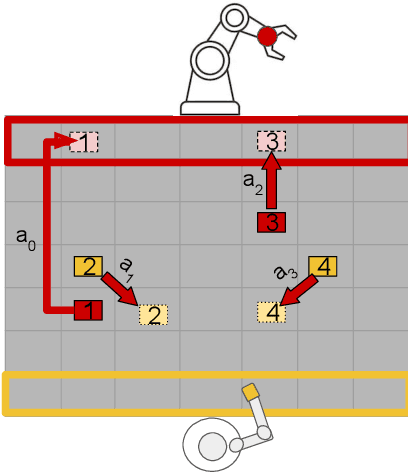
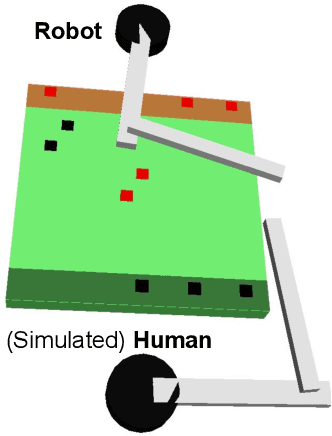
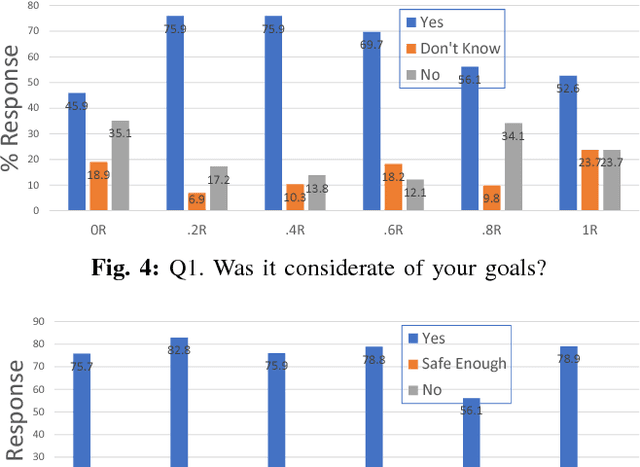
We consider shared workspace scenarios with humans and robots acting to achieve independent goals, termed as parallel play. We model these as general-sum games and construct a framework that utilizes the Nash equilibrium solution concept to consider the interactive effect of both agents while planning. We find multiple Pareto-optimal equilibria in these tasks. We hypothesize that people act by choosing an equilibrium based on social norms and their personalities. To enable coordination, we infer the equilibrium online using a probabilistic model that includes these two factors and use it to select the robot's action. We apply our approach to a close-proximity pick-and-place task involving a robot and a simulated human with three potential behaviors - defensive, selfish, and norm-following. We showed that using a Bayesian approach to infer the equilibrium enables the robot to complete the task with less than half the number of collisions while also reducing the task execution time as compared to the best baseline. We also performed a study with human participants interacting either with other humans or with different robot agents and observed that our proposed approach performs similar to human-human parallel play interactions. The code is available at https://github.com/shray/bayes-nash
Supportive Actions for Manipulation in Human-Robot Coworker Teams
May 02, 2020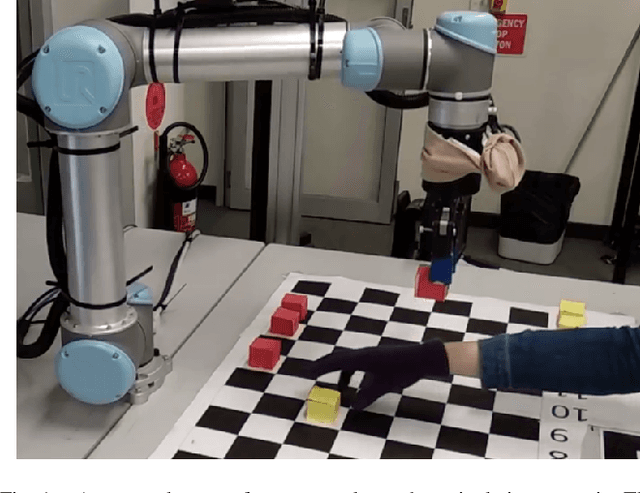
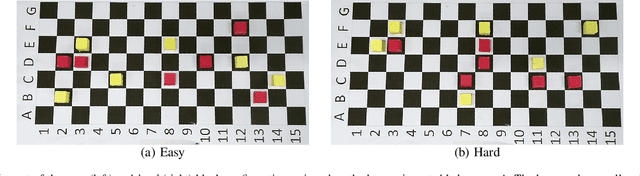
The increasing presence of robots alongside humans, such as in human-robot teams in manufacturing, gives rise to research questions about the kind of behaviors people prefer in their robot counterparts. We term actions that support interaction by reducing future interference with others as supportive robot actions and investigate their utility in a co-located manipulation scenario. We compare two robot modes in a shared table pick-and-place task: (1) Task-oriented: the robot only takes actions to further its own task objective and (2) Supportive: the robot sometimes prefers supportive actions to task-oriented ones when they reduce future goal-conflicts. Our experiments in simulation, using a simplified human model, reveal that supportive actions reduce the interference between agents, especially in more difficult tasks, but also cause the robot to take longer to complete the task. We implemented these modes on a physical robot in a user study where a human and a robot perform object placement on a shared table. Our results show that a supportive robot was perceived as a more favorable coworker by the human and also reduced interference with the human in the more difficult of two scenarios. However, it also took longer to complete the task highlighting an interesting trade-off between task-efficiency and human-preference that needs to be considered before designing robot behavior for close-proximity manipulation scenarios.
Collaborative Planning for Mixed-Autonomy Lane Merging
Aug 07, 2018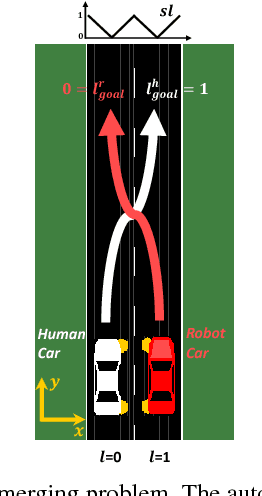

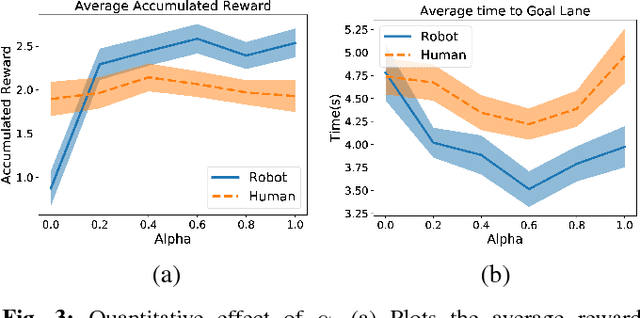
Driving is a social activity: drivers often indicate their intent to change lanes via motion cues. We consider mixed-autonomy traffic where a Human-driven Vehicle (HV) and an Autonomous Vehicle (AV) drive together. We propose a planning framework where the degree to which the AV considers the other agent's reward is controlled by a selfishness factor. We test our approach on a simulated two-lane highway where the AV and HV merge into each other's lanes. In a user study with 21 subjects and 6 different selfishness factors, we found that our planning approach was sound and that both agents had less merging times when a factor that balances the rewards for the two agents was chosen. Our results on double lane merging suggest it to be a non-zero-sum game and encourage further investigation on collaborative decision making algorithms for mixed-autonomy traffic.
One-Shot Learning for Semantic Segmentation
Sep 11, 2017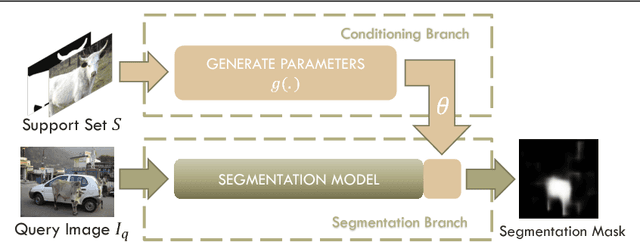

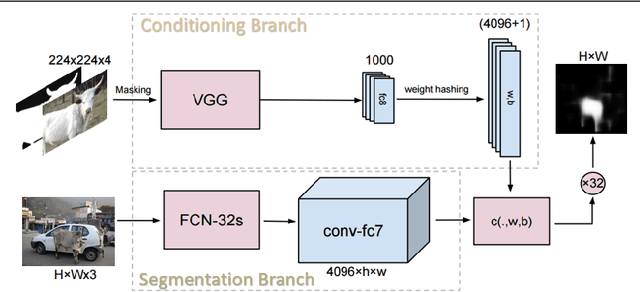
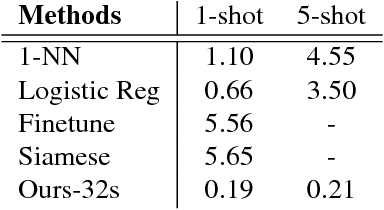
Low-shot learning methods for image classification support learning from sparse data. We extend these techniques to support dense semantic image segmentation. Specifically, we train a network that, given a small set of annotated images, produces parameters for a Fully Convolutional Network (FCN). We use this FCN to perform dense pixel-level prediction on a test image for the new semantic class. Our architecture shows a 25% relative meanIoU improvement compared to the best baseline methods for one-shot segmentation on unseen classes in the PASCAL VOC 2012 dataset and is at least 3 times faster.