 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVIBES -- Vision Backbone Efficient Selection
Oct 11, 2024



This work tackles the challenge of efficiently selecting high-performance pre-trained vision backbones for specific target tasks. Although exhaustive search within a finite set of backbones can solve this problem, it becomes impractical for large datasets and backbone pools. To address this, we introduce Vision Backbone Efficient Selection (VIBES), which aims to quickly find well-suited backbones, potentially trading off optimality for efficiency. We propose several simple yet effective heuristics to address VIBES and evaluate them across four diverse computer vision datasets. Our results show that these approaches can identify backbones that outperform those selected from generic benchmarks, even within a limited search budget of one hour on a single GPU. We reckon VIBES marks a paradigm shift from benchmarks to task-specific optimization.
Benchmarking person re-identification datasets and approaches for practical real-world implementations
Dec 20, 2022



Recently, Person Re-Identification (Re-ID) has received a lot of attention. Large datasets containing labeled images of various individuals have been released, allowing researchers to develop and test many successful approaches. However, when such Re-ID models are deployed in new cities or environments, the task of searching for people within a network of security cameras is likely to face an important domain shift, thus resulting in decreased performance. Indeed, while most public datasets were collected in a limited geographic area, images from a new city present different features (e.g., people's ethnicity and clothing style, weather, architecture, etc.). In addition, the whole frames of the video streams must be converted into cropped images of people using pedestrian detection models, which behave differently from the human annotators who created the dataset used for training. To better understand the extent of this issue, this paper introduces a complete methodology to evaluate Re-ID approaches and training datasets with respect to their suitability for unsupervised deployment for live operations. This method is used to benchmark four Re-ID approaches on three datasets, providing insight and guidelines that can help to design better Re-ID pipelines in the future.
TrADe Re-ID -- Live Person Re-Identification using Tracking and Anomaly Detection
Sep 14, 2022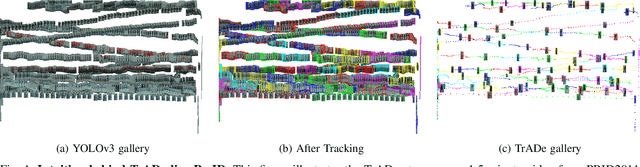
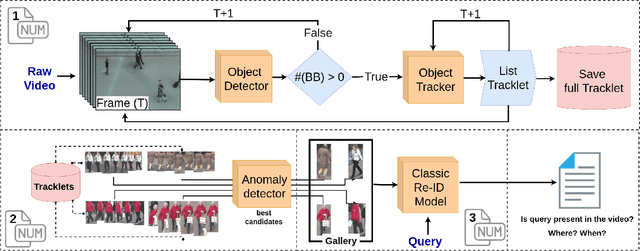
Person Re-Identification (Re-ID) aims to search for a person of interest (query) in a network of cameras. In the classic Re-ID setting the query is sought in a gallery containing properly cropped images of entire bodies. Recently, the live Re-ID setting was introduced to represent the practical application context of Re-ID better. It consists in searching for the query in short videos, containing whole scene frames. The initial live Re-ID baseline used a pedestrian detector to build a large search gallery and a classic Re-ID model to find the query in the gallery. However, the galleries generated were too large and contained low-quality images, which decreased the live Re-ID performance. Here, we present a new live Re-ID approach called TrADe, to generate lower high-quality galleries. TrADe first uses a Tracking algorithm to identify sequences of images of the same individual in the gallery. Following, an Anomaly Detection model is used to select a single good representative of each tracklet. TrADe is validated on the live Re-ID version of the PRID-2011 dataset and shows significant improvements over the baseline.
Unifying Evaluation of Machine Learning Safety Monitors
Aug 31, 2022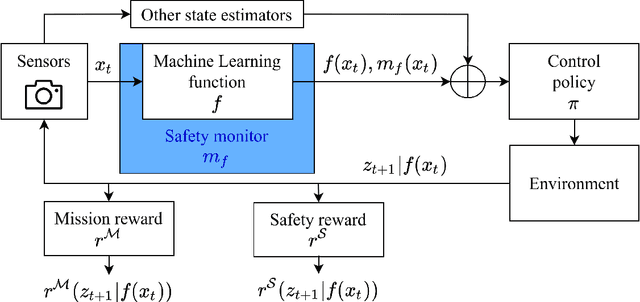
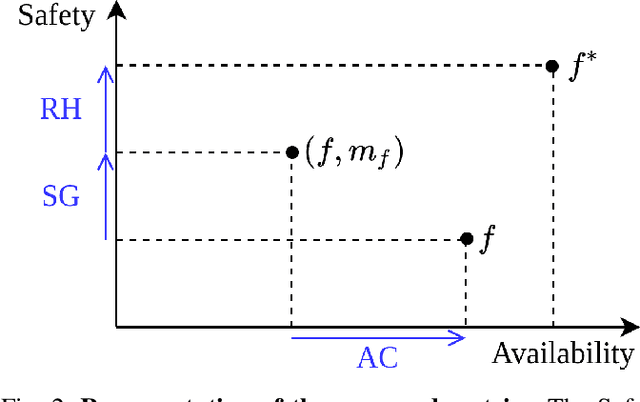
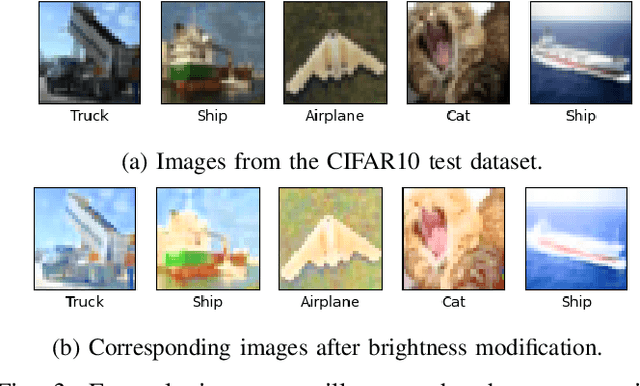
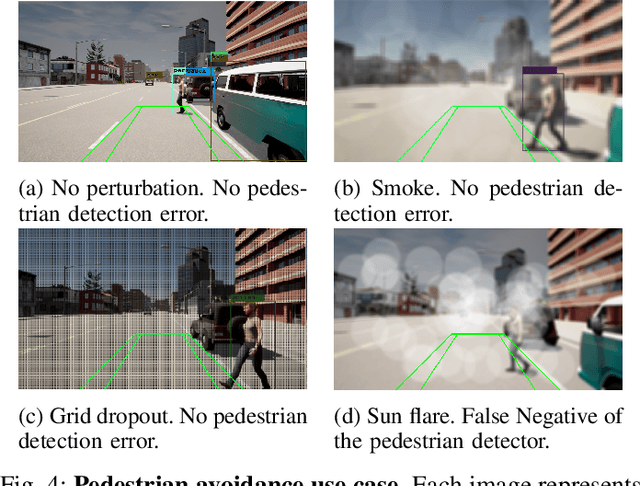
With the increasing use of Machine Learning (ML) in critical autonomous systems, runtime monitors have been developed to detect prediction errors and keep the system in a safe state during operations. Monitors have been proposed for different applications involving diverse perception tasks and ML models, and specific evaluation procedures and metrics are used for different contexts. This paper introduces three unified safety-oriented metrics, representing the safety benefits of the monitor (Safety Gain), the remaining safety gaps after using it (Residual Hazard), and its negative impact on the system's performance (Availability Cost). To compute these metrics, one requires to define two return functions, representing how a given ML prediction will impact expected future rewards and hazards. Three use-cases (classification, drone landing, and autonomous driving) are used to demonstrate how metrics from the literature can be expressed in terms of the proposed metrics. Experimental results on these examples show how different evaluation choices impact the perceived performance of a monitor. As our formalism requires us to formulate explicit safety assumptions, it allows us to ensure that the evaluation conducted matches the high-level system requirements.
Evaluation of Runtime Monitoring for UAV Emergency Landing
Feb 07, 2022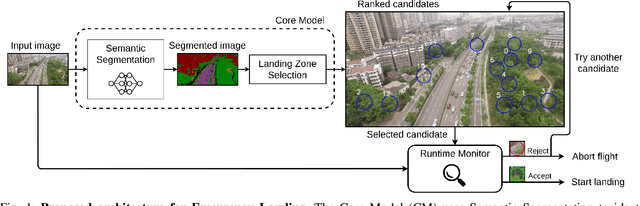
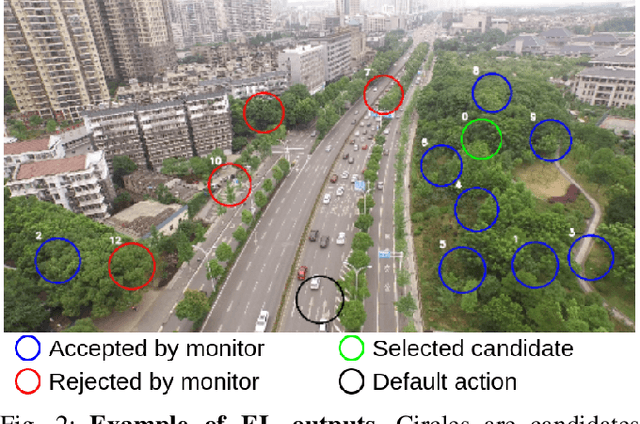
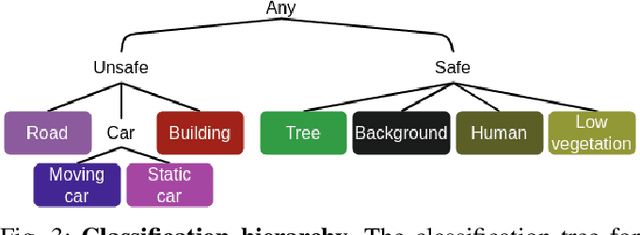
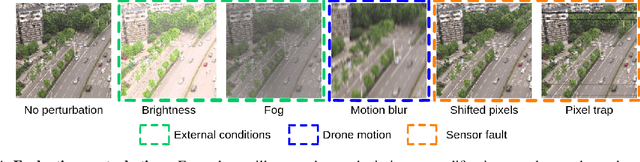
To certify UAV operations in populated areas, risk mitigation strategies -- such as Emergency Landing (EL) -- must be in place to account for potential failures. EL aims at reducing ground risk by finding safe landing areas using on-board sensors. The first contribution of this paper is to present a new EL approach, in line with safety requirements introduced in recent research. In particular, the proposed EL pipeline includes mechanisms to monitor learning based components during execution. This way, another contribution is to study the behavior of Machine Learning Runtime Monitoring (MLRM) approaches within the context of a real-world critical system. A new evaluation methodology is introduced, and applied to assess the practical safety benefits of three MLRM mechanisms. The proposed approach is compared to a default mitigation strategy (open a parachute when a failure is detected), and appears to be much safer.
Certifying Emergency Landing for Safe Urban UAV
Apr 30, 2021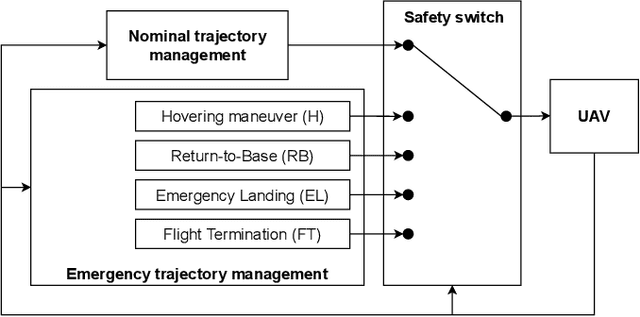
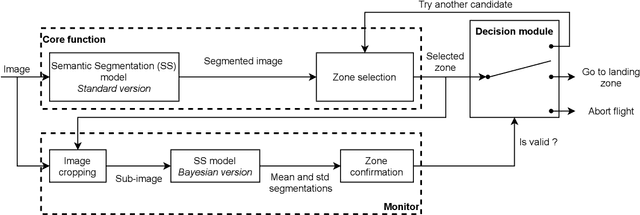
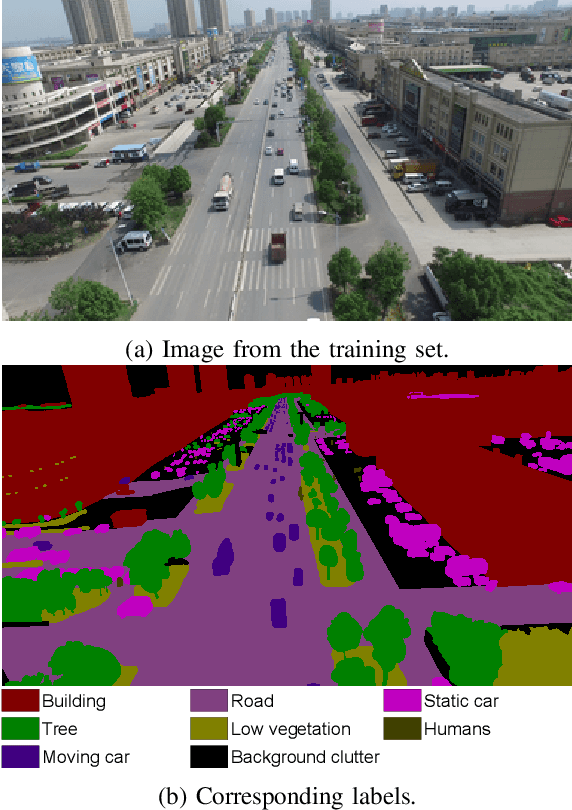
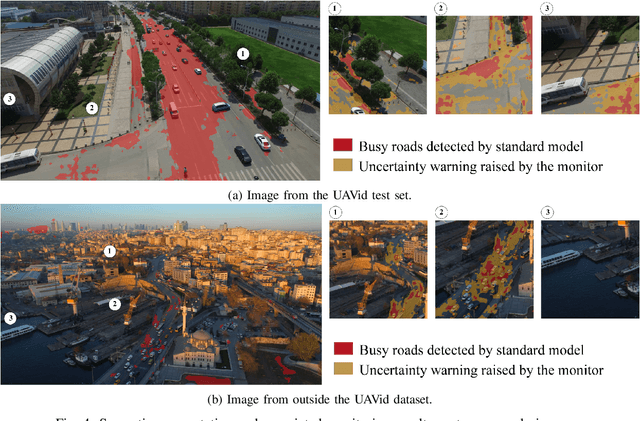
Unmanned Aerial Vehicles (UAVs) have the potential to be used for many applications in urban environments. However, allowing UAVs to fly above densely populated areas raises concerns regarding safety. One of the main safety issues is the possibility for a failure to cause the loss of navigation capabilities, which can result in the UAV falling/landing in hazardous areas such as busy roads, where it can cause fatal accidents. Current standards, such as the SORA published in 2019, do not consider applicable mitigation techniques to handle this kind of hazardous situations. Consequently, certifying UAV urban operations implies to demonstrate very high levels of integrity, which results in prohibitive development costs. To address this issue, this paper explores the concept of Emergency Landing (EL). A safety analysis is conducted on an urban UAV case study, and requirements are proposed to enable the integration of EL as an acceptable mitigation mean in the SORA. Based on these requirements, an EL implementation was developed, together with a runtime monitoring architecture to enhance confidence in the system. Preliminary qualitative results are presented and the monitor seem to be able to detect errors of the EL system effectively.
Combining pretrained CNN feature extractors to enhance clustering of complex natural images
Jan 07, 2021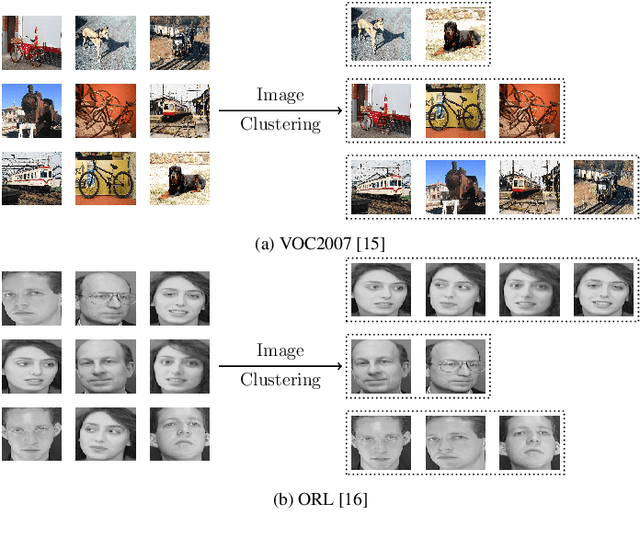
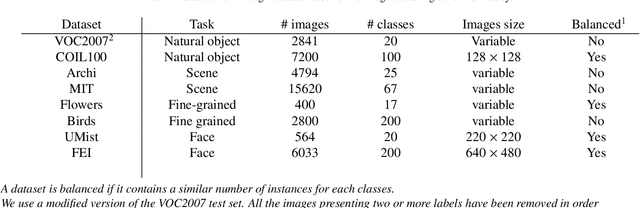
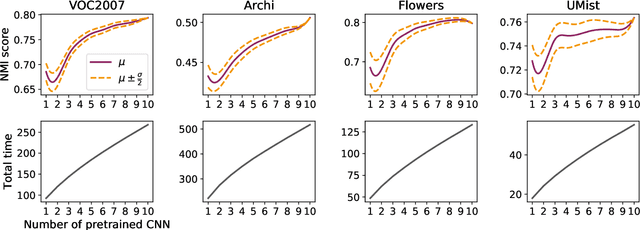
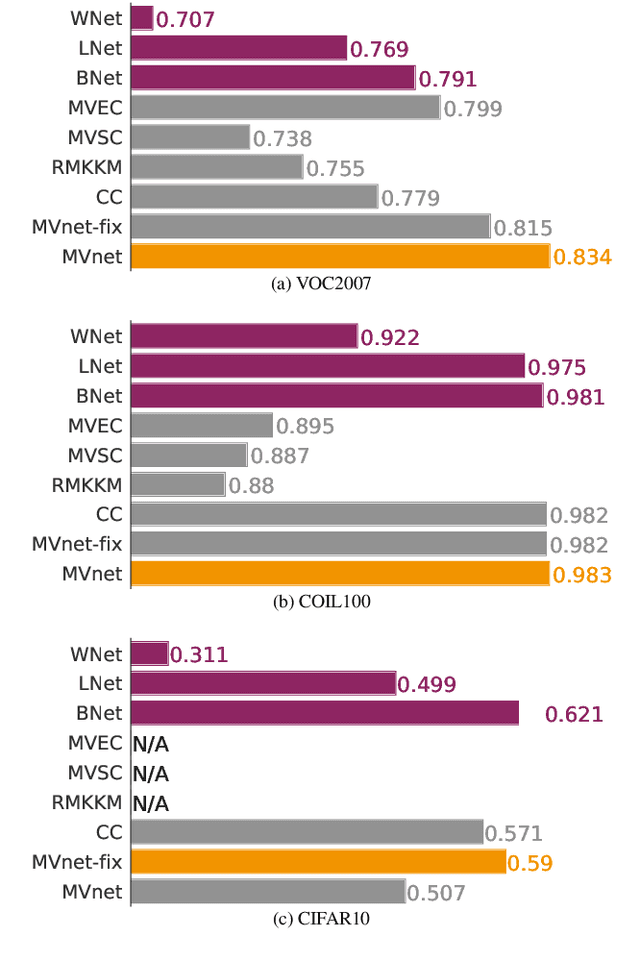
Recently, a common starting point for solving complex unsupervised image classification tasks is to use generic features, extracted with deep Convolutional Neural Networks (CNN) pretrained on a large and versatile dataset (ImageNet). However, in most research, the CNN architecture for feature extraction is chosen arbitrarily, without justification. This paper aims at providing insight on the use of pretrained CNN features for image clustering (IC). First, extensive experiments are conducted and show that, for a given dataset, the choice of the CNN architecture for feature extraction has a huge impact on the final clustering. These experiments also demonstrate that proper extractor selection for a given IC task is difficult. To solve this issue, we propose to rephrase the IC problem as a multi-view clustering (MVC) problem that considers features extracted from different architectures as different "views" of the same data. This approach is based on the assumption that information contained in the different CNN may be complementary, even when pretrained on the same data. We then propose a multi-input neural network architecture that is trained end-to-end to solve the MVC problem effectively. This approach is tested on nine natural image datasets, and produces state-of-the-art results for IC.
* 21 pages, 16 figures, 10 tables, preprint of our paper published in Neurocomputing
Robust Detection of Objects under Periodic Motion with Gaussian Process Filtering
Sep 29, 2020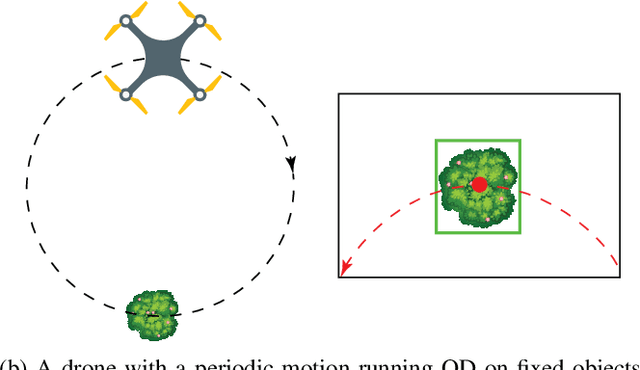
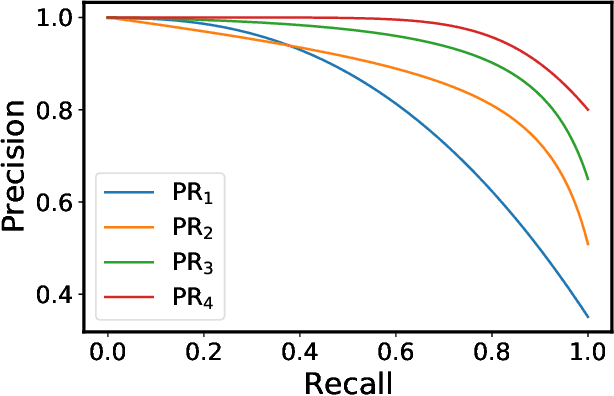
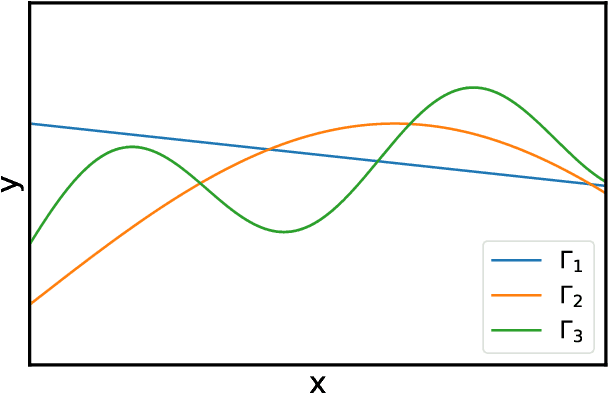
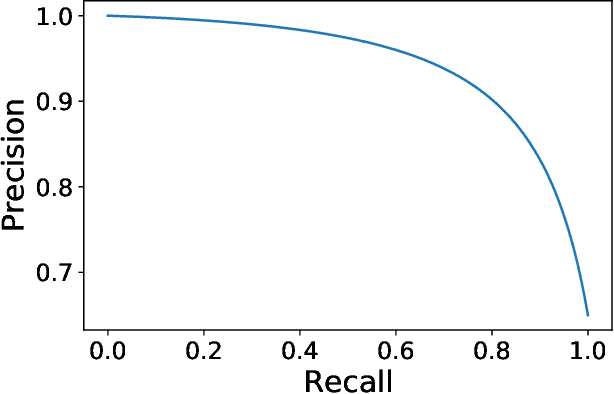
Object Detection (OD) is an important task in Computer Vision with many practical applications. For some use cases, OD must be done on videos, where the object of interest has a periodic motion. In this paper, we formalize the problem of periodic OD, which consists in improving the performance of an OD model in the specific case where the object of interest is repeating similar spatio-temporal trajectories with respect to the video frames. The proposed approach is based on training a Gaussian Process to model the periodic motion, and use it to filter out the erroneous predictions of the OD model. By simulating various OD models and periodic trajectories, we demonstrate that this filtering approach, which is entirely data-driven, improves the detection performance by a large margin.
Learning local trajectories for high precision robotic tasks : application to KUKA LBR iiwa Cartesian positioning
Jan 05, 2017

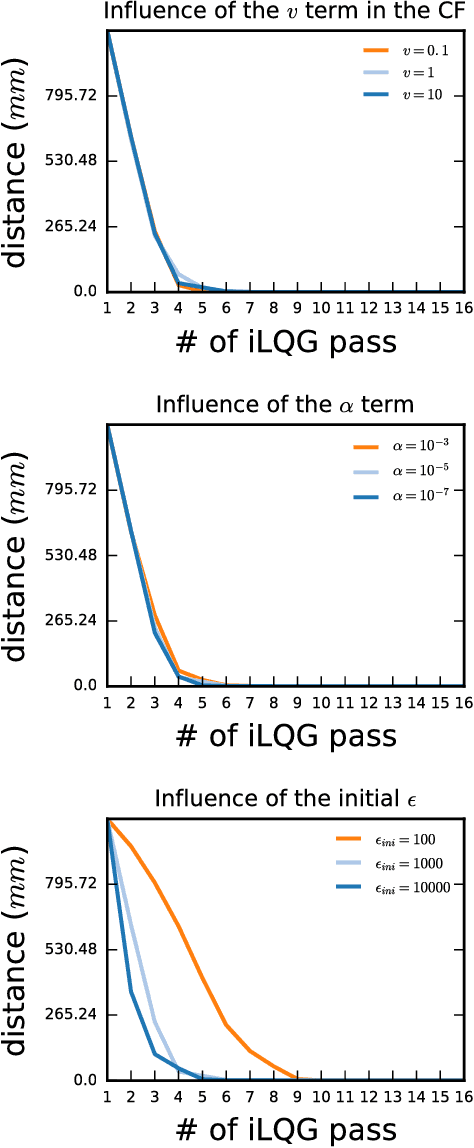
To ease the development of robot learning in industry, two conditions need to be fulfilled. Manipulators must be able to learn high accuracy and precision tasks while being safe for workers in the factory. In this paper, we extend previously submitted work which consists in rapid learning of local high accuracy behaviors. By exploration and regression, linear and quadratic models are learnt for respectively the dynamics and cost function. Iterative Linear Quadratic Gaussian Regulator combined with cost quadratic regression can converge rapidly in the final stages towards high accuracy behavior as the cost function is modelled quite precisely. In this paper, both a different cost function and a second order improvement method are implemented within this framework. We also propose an analysis of the algorithm parameters through simulation for a positioning task. Finally, an experimental validation on a KUKA LBR iiwa robot is carried out. This collaborative robot manipulator can be easily programmed into safety mode, which makes it qualified for the second industry constraint stated above.
* 6 pages, double column, 6 figures and one table. Published in: Industrial Electronics Society , IECON 2016 - 42nd Annual Conference of the IEEE