 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning local trajectories for high precision robotic tasks : application to KUKA LBR iiwa Cartesian positioning
Paper and Code
Jan 05, 2017
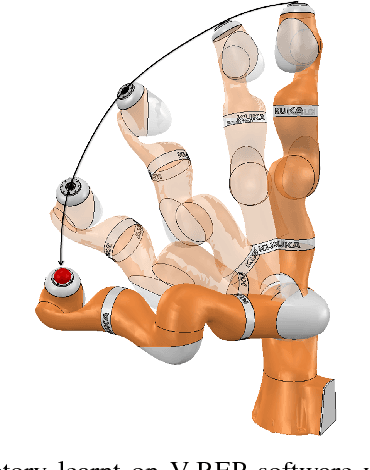

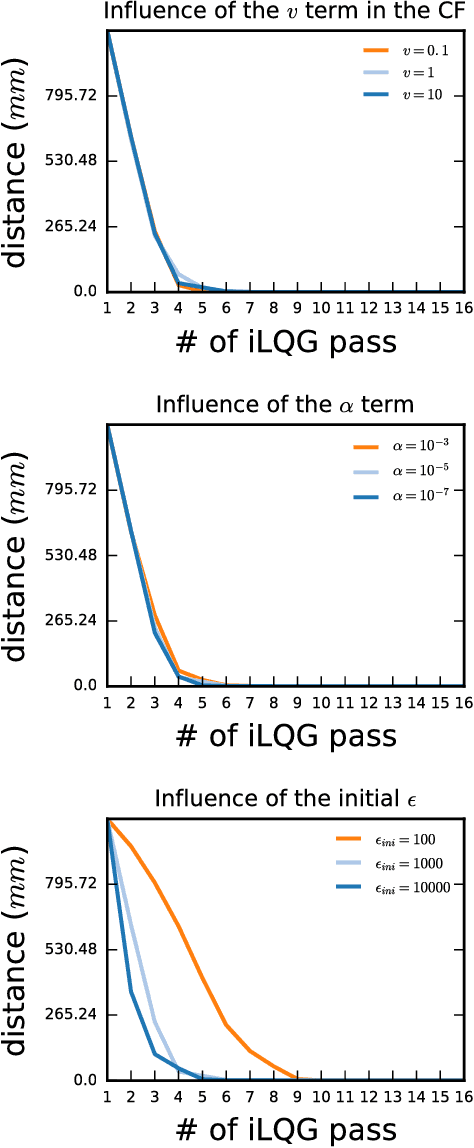
To ease the development of robot learning in industry, two conditions need to be fulfilled. Manipulators must be able to learn high accuracy and precision tasks while being safe for workers in the factory. In this paper, we extend previously submitted work which consists in rapid learning of local high accuracy behaviors. By exploration and regression, linear and quadratic models are learnt for respectively the dynamics and cost function. Iterative Linear Quadratic Gaussian Regulator combined with cost quadratic regression can converge rapidly in the final stages towards high accuracy behavior as the cost function is modelled quite precisely. In this paper, both a different cost function and a second order improvement method are implemented within this framework. We also propose an analysis of the algorithm parameters through simulation for a positioning task. Finally, an experimental validation on a KUKA LBR iiwa robot is carried out. This collaborative robot manipulator can be easily programmed into safety mode, which makes it qualified for the second industry constraint stated above.