 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePINSAT: Parallelized Interleaving of Graph Search and Trajectory Optimization for Kinodynamic Motion Planning
Jan 17, 2024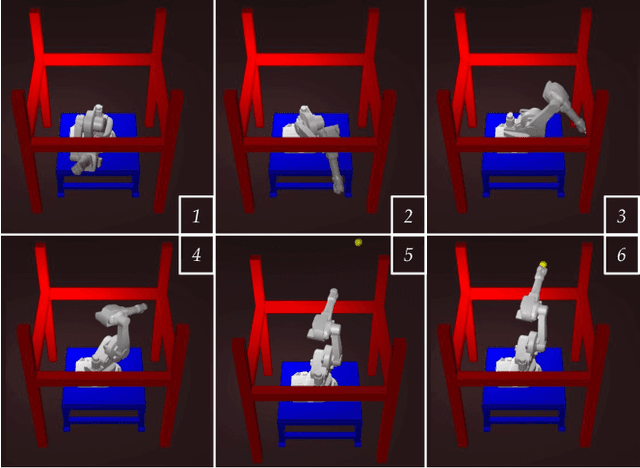

Trajectory optimization is a widely used technique in robot motion planning for letting the dynamics and constraints on the system shape and synthesize complex behaviors. Several previous works have shown its benefits in high-dimensional continuous state spaces and under differential constraints. However, long time horizons and planning around obstacles in non-convex spaces pose challenges in guaranteeing convergence or finding optimal solutions. As a result, discrete graph search planners and sampling-based planers are preferred when facing obstacle-cluttered environments. A recently developed algorithm called INSAT effectively combines graph search in the low-dimensional subspace and trajectory optimization in the full-dimensional space for global kinodynamic planning over long horizons. Although INSAT successfully reasoned about and solved complex planning problems, the numerous expensive calls to an optimizer resulted in large planning times, thereby limiting its practical use. Inspired by the recent work on edge-based parallel graph search, we present PINSAT, which introduces systematic parallelization in INSAT to achieve lower planning times and higher success rates, while maintaining significantly lower costs over relevant baselines. We demonstrate PINSAT by evaluating it on 6 DoF kinodynamic manipulation planning with obstacles.
A-ePA*SE: Anytime Edge-Based Parallel A* for Slow Evaluations
May 08, 2023


Anytime search algorithms are useful for planning problems where a solution is desired under a limited time budget. Anytime algorithms first aim to provide a feasible solution quickly and then attempt to improve it until the time budget expires. On the other hand, parallel search algorithms utilize the multithreading capability of modern processors to speed up the search. One such algorithm, ePA*SE (Edge-Based Parallel A* for Slow Evaluations), parallelizes edge evaluations to achieve faster planning and is especially useful in domains with expensive-to-compute edges. In this work, we propose an extension that brings the anytime property to ePA*SE, resulting in A-ePA*SE. We evaluate A-ePA*SE experimentally and show that it is significantly more efficient than other anytime search methods. The open-source code for A-ePA*SE, along with the baselines, is available here: https://github.com/shohinm/parallel_search
GePA*SE: Generalized Edge-Based Parallel A* for Slow Evaluations
Jan 24, 2023Parallel search algorithms have been shown to improve planning speed by harnessing the multithreading capability of modern processors. One such algorithm PA*SE achieves this by parallelizing state expansions, whereas another algorithm ePA*SE achieves this by effectively parallelizing edge evaluations. ePA*SE targets domains in which the action space comprises actions with expensive but similar evaluation times. However, in a number of robotics domains, the action space is heterogenous in the computational effort required to evaluate the cost of an action and its outcome. Motivated by this, we introduce GePA*SE: Generalized Edge-based Parallel A* for Slow Evaluations, which generalizes the key ideas of PA*SE and ePA*SE i.e. parallelization of state expansions and edge evaluations respectively. This extends its applicability to domains that have actions requiring varying computational effort to evaluate them. In particular, we focus on manipulation planning for a high-DoF robot arm which has an action space comprising both cheap and expensive to compute motion primitives. The open-source code for GePA*SE along with the baselines is available here: https://github.com/shohinm/parallel_search
ePA*SE: Edge-based Parallel A* for Slow Evaluations
Mar 02, 2022
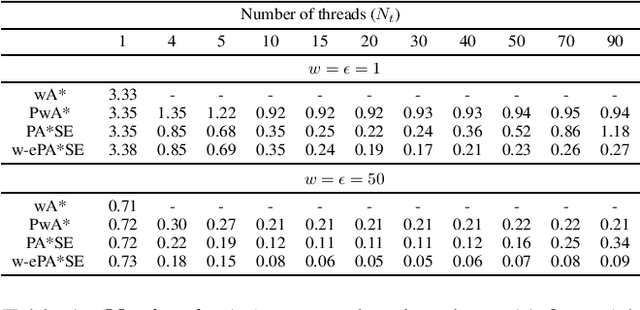
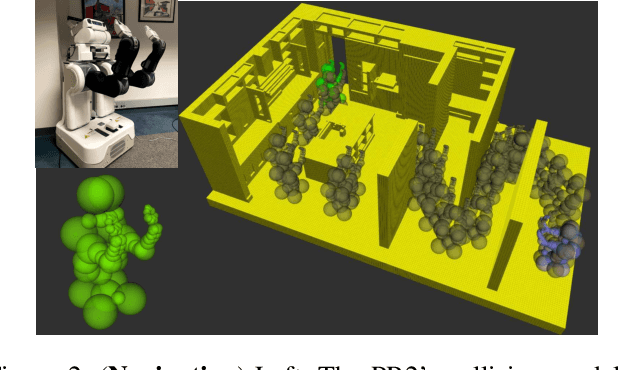
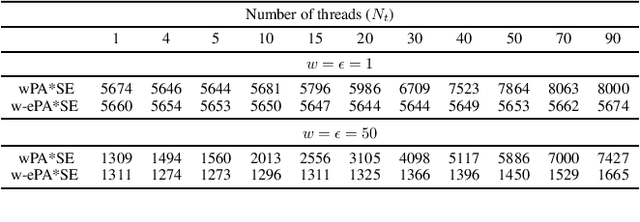
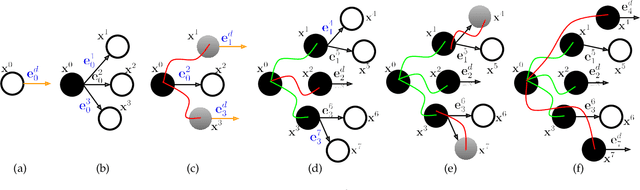
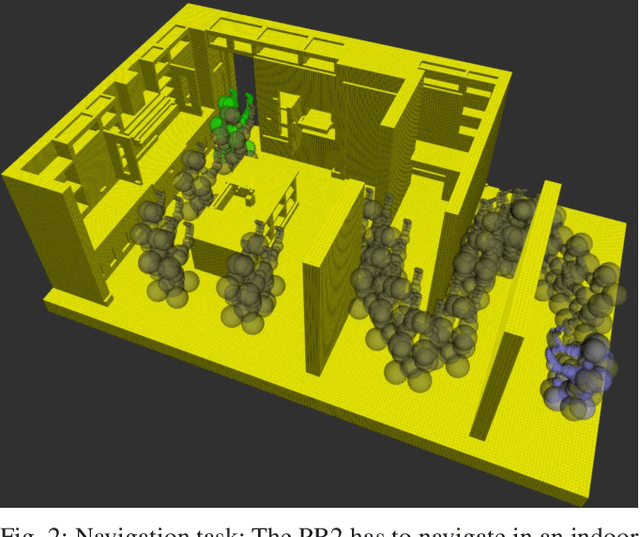
Parallel search algorithms harness the multithreading capability of modern processors to achieve faster planning. One such algorithm is PA*SE (Parallel A* for Slow Expansions), which parallelizes state expansions to achieve faster planning in domains where state expansions are slow. In this work, we propose ePA*SE (Edge-based Parallel A* for Slow Evaluations) that improves on PA*SE by parallelizing edge evaluations instead of state expansions. This makes ePA*SE more efficient in domains where edge evaluations are expensive and need varying amounts of computational effort, which is often the case in robotics. On the theoretical front, we show that ePA*SE provides rigorous optimality guarantees. In addition, ePA*SE can be trivially extended to handle an inflation weight on the heuristic resulting in a bounded suboptimal algorithm w-ePA*SE (Weighted ePA*SE) that trades off optimality for faster planning. On the experimental front, we validate the proposed algorithm in two different planning domains: 1) motion planning for 3D humanoid navigation and 2) task and motion planning for a dual-arm robotic assembly task. We show that ePA*SE can be significantly more efficient than PA*SE and other alternatives.
MPLP: Massively Parallelized Lazy Planning
Jul 06, 2021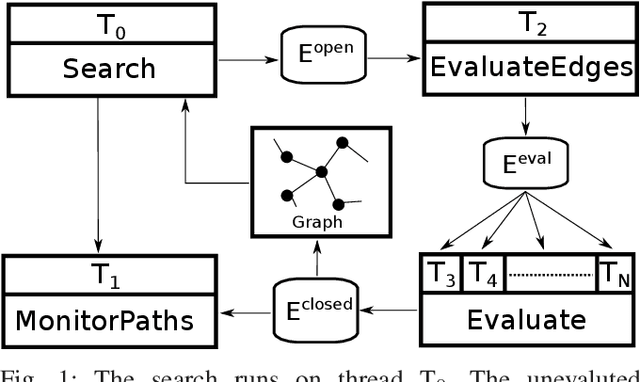
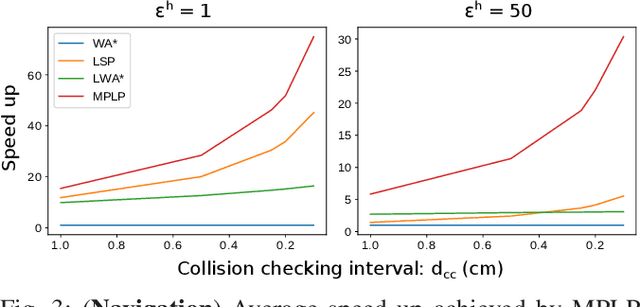
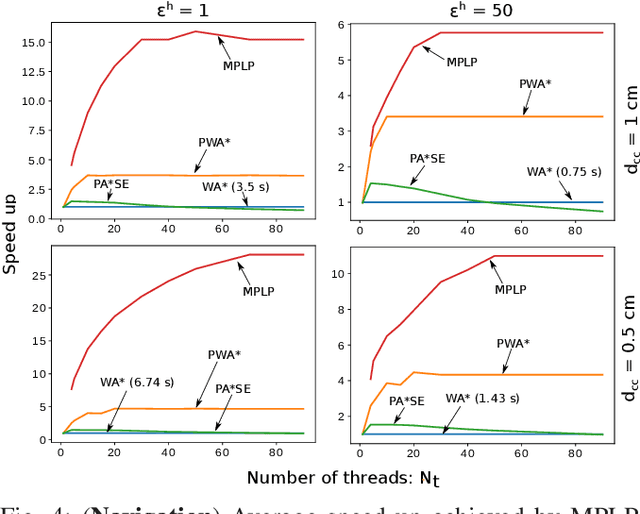
Lazy search algorithms have been developed to efficiently solve planning problems in domains where the computational effort is dominated by the cost of edge evaluation. The current approaches operate by intelligently balancing computational effort between searching the graph and evaluating edges. However these algorithms are designed to run as a single process and do not leverage the multi-threading capability of modern processors. In this work we propose a massively parallelized, bounded suboptimal, lazy search algorithm (MPLP) that harnesses modern multi-core processors. In MPLP, searching of the graph and edge evaluations are performed completely asynchronously in parallel, leading to a drastic improvement in planning time. We validate the proposed algorithm in two different planning domains: motion planning for a humanoid navigation and task and motion planning for a robotic assembly task. We show that MPLP outperforms the state of the art lazy search as well as parallel search algorithms.
Sim-to-Real Task Planning and Execution from Perception via Reactivity and Recovery
Nov 17, 2020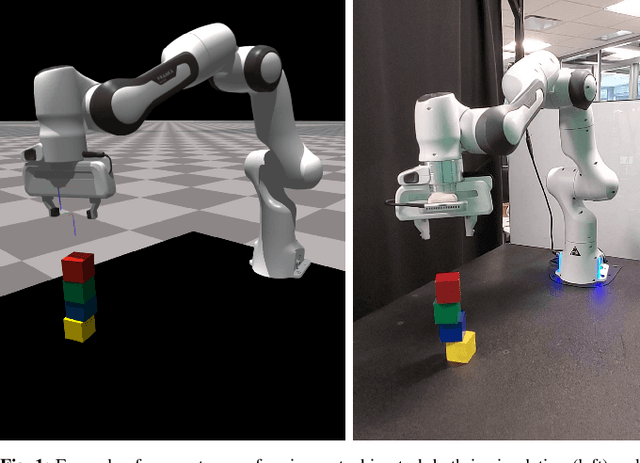
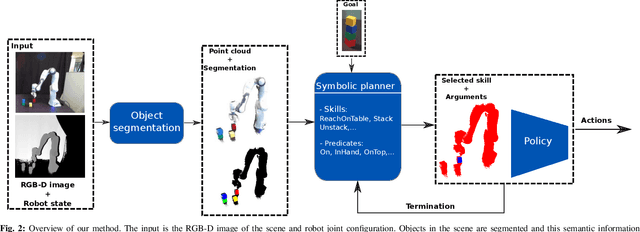
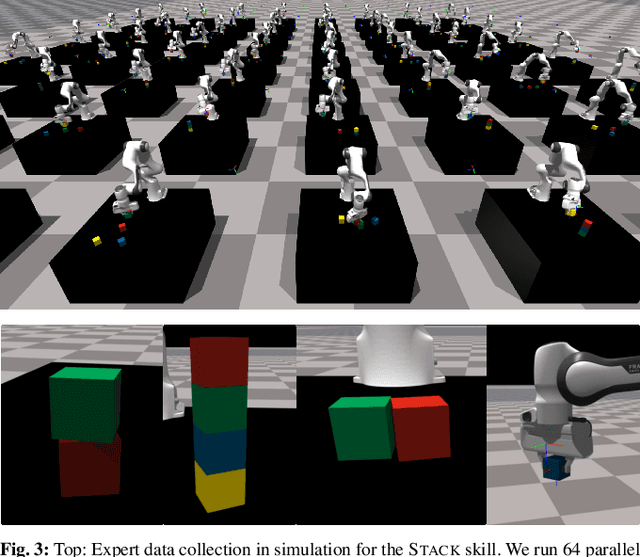
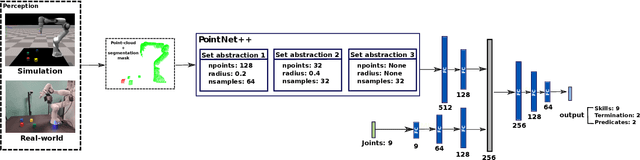
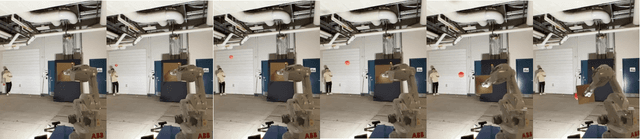
Zero-shot execution of unseen robotic tasks is an important problem in robotics. One potential approach is through task planning: combining known skills based on their preconditions and effects to achieve a user-specified goal. In this work, we propose such a task planning approach to build a reactive system for multi-step manipulation tasks that can be trained on simulation data and applied in the real-world. We explore a block-stacking task because it has a clear structure, where multiple skills must be chained together: pick up a block, place it on top of another block, etc. We learn these skills, along with a set of predicate preconditions and termination conditions, entirely in simulation. All components are learned as PointNet++ models, parameterized by the masks of relevant objects. The predicates allow us to create high-level plans combining different skills. They also serve as precondition functions for the skills, which enables the system to recognize failures and accomplish long-horizon tasks from perceptual input, which is critical for real-world execution. We evaluate our proposed approach in both simulation and in the real-world, showing an increase in success rate from 91.6% to 98% in simulation and from 10% to 80% success rate in the real-world as compared with naive baselines.
A Planning Framework for Persistent, Multi-UAV Coverage with Global Deconfliction
Aug 27, 2019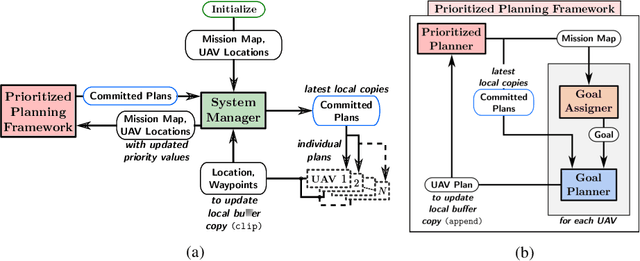
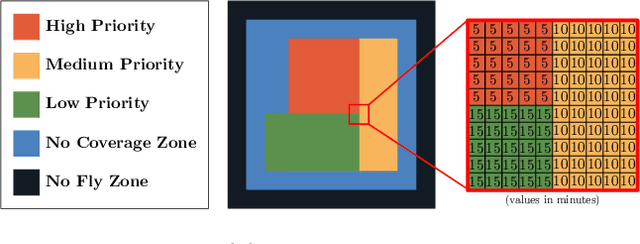
Planning for multi-robot coverage seeks to determine collision-free paths for a fleet of robots, enabling them to collectively observe points of interest in an environment. Persistent coverage is a variant of traditional coverage where coverage-levels in the environment decay over time. Thus, robots have to continuously revisit parts of the environment to maintain a desired coverage-level. Facilitating this in the real world demands we tackle numerous subproblems. While there exist standard solutions to these subproblems, there is no complete framework that addresses all of their individual challenges as a whole in a practical setting. We adapt and combine these solutions to present a planning framework for persistent coverage with multiple unmanned aerial vehicles (UAVs). Specifically, we run a continuous loop of goal assignment and globally deconflicting, kinodynamic path planning for multiple UAVs. We evaluate our framework in simulation as well as the real world. In particular, we demonstrate that (i) our framework exhibits graceful coverage given sufficient resources, we maintain persistent coverage; if resources are insufficient (e.g., having too few UAVs for a given size of the enviornment), coverage-levels decay slowly and (ii) planning with global deconfliction in our framework incurs a negligibly higher price compared to other weaker, more local collision-checking schemes. (Video: https://youtu.be/aqDs6Wymp5Q)