 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSim-to-Real Task Planning and Execution from Perception via Reactivity and Recovery
Paper and Code
Nov 17, 2020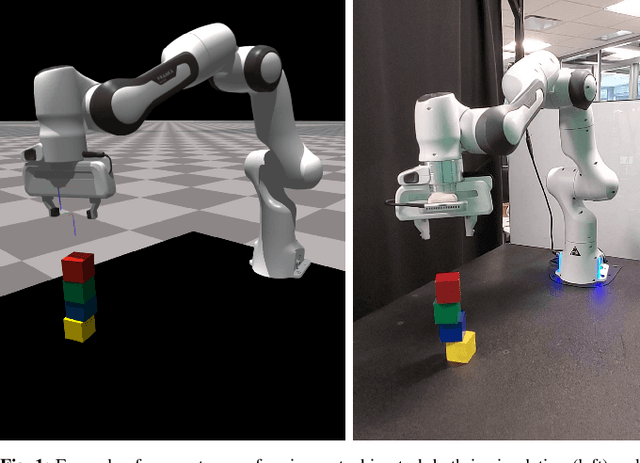
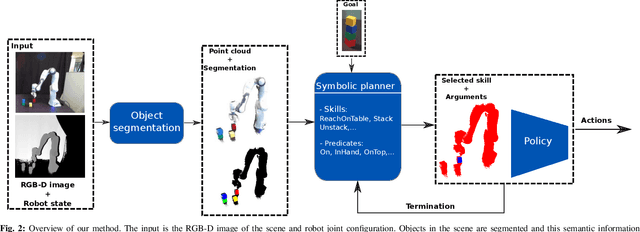
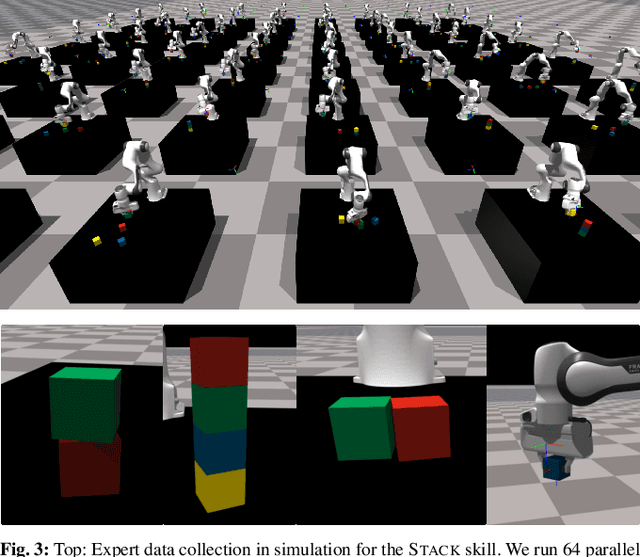
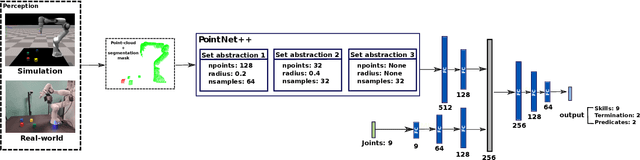
Zero-shot execution of unseen robotic tasks is an important problem in robotics. One potential approach is through task planning: combining known skills based on their preconditions and effects to achieve a user-specified goal. In this work, we propose such a task planning approach to build a reactive system for multi-step manipulation tasks that can be trained on simulation data and applied in the real-world. We explore a block-stacking task because it has a clear structure, where multiple skills must be chained together: pick up a block, place it on top of another block, etc. We learn these skills, along with a set of predicate preconditions and termination conditions, entirely in simulation. All components are learned as PointNet++ models, parameterized by the masks of relevant objects. The predicates allow us to create high-level plans combining different skills. They also serve as precondition functions for the skills, which enables the system to recognize failures and accomplish long-horizon tasks from perceptual input, which is critical for real-world execution. We evaluate our proposed approach in both simulation and in the real-world, showing an increase in success rate from 91.6% to 98% in simulation and from 10% to 80% success rate in the real-world as compared with naive baselines.