 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Equivariant Neural-Augmented Object Dynamics From Few Interactions
May 04, 2026Learning data-efficient object dynamics models for robotic manipulation remains challenging, especially for deformable objects. A popular approach is to model objects as sets of 3D particles and learn their motion using graph neural networks. In practice, this is not enough to maintain physical feasibility over long horizons and may require large amounts of interaction data to learn. We introduce PIEGraph, a novel approach to combining analytical physics and data-driven models to capture object dynamics for both rigid and deformable bodies using limited real-world interaction data. PIEGraph consists of two components: (1) a \textbf{P}hysically \textbf{I}nformed particle-based analytical model (implemented as a spring--mass system) to enforce physically feasible motion, and (2) an \textbf{E}quivariant \textbf{Graph} Neural Network with a novel action representation that exploits symmetries in particle interactions to guide the analytical model. We evaluate PIEGraph in simulation and on robot hardware for reorientation and repositioning tasks with ropes, cloth, stuffed animals and rigid objects. We show that our method enables accurate dynamics prediction and reliable downstream robotic manipulation planning, which outperforms state of the art baselines.
Show, Don't Tell: Detecting Novel Objects by Watching Human Videos
Mar 13, 2026How can a robot quickly identify and recognize new objects shown to it during a human demonstration? Existing closed-set object detectors frequently fail at this because the objects are out-of-distribution. While open-set detectors (e.g., VLMs) sometimes succeed, they often require expensive and tedious human-in-the-loop prompt engineering to uniquely recognize novel object instances. In this paper, we present a self-supervised system that eliminates the need for tedious language descriptions and expensive prompt engineering by training a bespoke object detector on an automatically created dataset, supervised by the human demonstration itself. In our approach, "Show, Don't Tell," we show the detector the specific objects of interest during the demonstration, rather than telling the detector about these objects via complex language descriptions. By bypassing language altogether, this paradigm enables us to quickly train bespoke detectors tailored to the relevant objects observed in human task demonstrations. We develop an integrated on-robot system to deploy our "Show, Don't Tell" paradigm of automatic dataset creation and novel object-detection on a real-world robot. Empirical results demonstrate that our pipeline significantly outperforms state-of-the-art detection and recognition methods for manipulated objects, leading to improved task completion for the robot.
EMPM: Embodied MPM for Modeling and Simulation of Deformable Objects
Jan 24, 2026Modeling deformable objects - especially continuum materials - in a way that is physically plausible, generalizable, and data-efficient remains challenging across 3D vision, graphics, and robotic manipulation. Many existing methods oversimplify the rich dynamics of deformable objects or require large training sets, which often limits generalization. We introduce embodied MPM (EMPM), a deformable object modeling and simulation framework built on a differentiable Material Point Method (MPM) simulator that captures the dynamics of challenging materials. From multi-view RGB-D videos, our approach reconstructs geometry and appearance, then uses an MPM physics engine to simulate object behavior by minimizing the mismatch between predicted and observed visual data. We further optimize MPM parameters online using sensory feedback, enabling adaptive, robust, and physics-aware object representations that open new possibilities for robotic manipulation of complex deformables. Experiments show that EMPM outperforms spring-mass baseline models. Project website: https://embodied-mpm.github.io.
Effectively Incorporating Weighted Cost-to-go Heuristic in Suboptimal CBS
May 25, 2022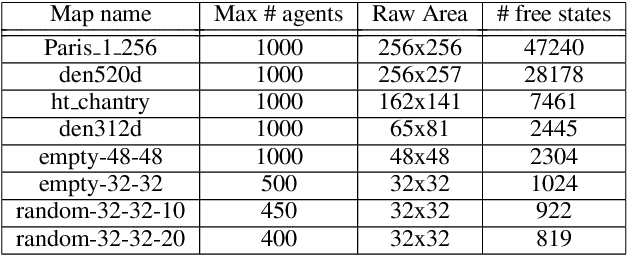
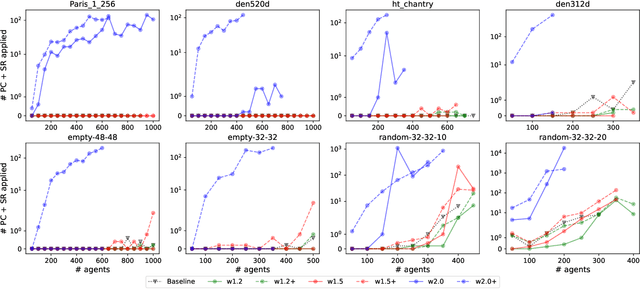
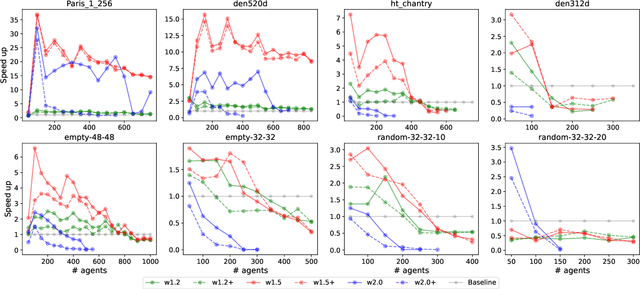

Conflict-Based Search (CBS) is a popular multi-agent path finding (MAPF) solver that employs a low-level single agent planner and a high-level constraint tree to resolve conflicts. The vast majority of modern MAPF solvers focus on improving CBS by reducing the size of this tree through various strategies with few methods modifying the low level planner. All low level planners in existing CBS methods use an unweighted cost-to-go heuristic, with suboptimal CBS methods also using a conflict heuristic to help the high level search. Contrary to prevailing beliefs, we show that the cost-to-go heuristic can be used significantly more effectively by weighting it in a specific manner alongside the conflict heuristic. We introduce two variants of doing so and demonstrate that this change can lead to 2-100x speedups in certain scenarios. Additionally, to the best of our knowledge, we show the first theoretical relation of prioritized planning and bounded suboptimal CBS and demonstrate that our methods are their natural generalization.
AMRA*: Anytime Multi-Resolution Multi-Heuristic A*
Oct 11, 2021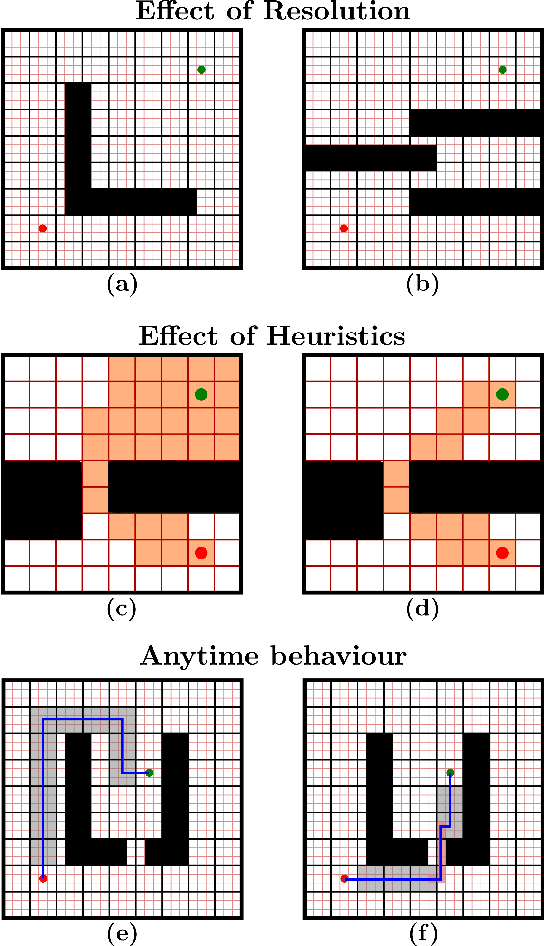
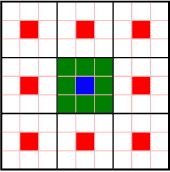
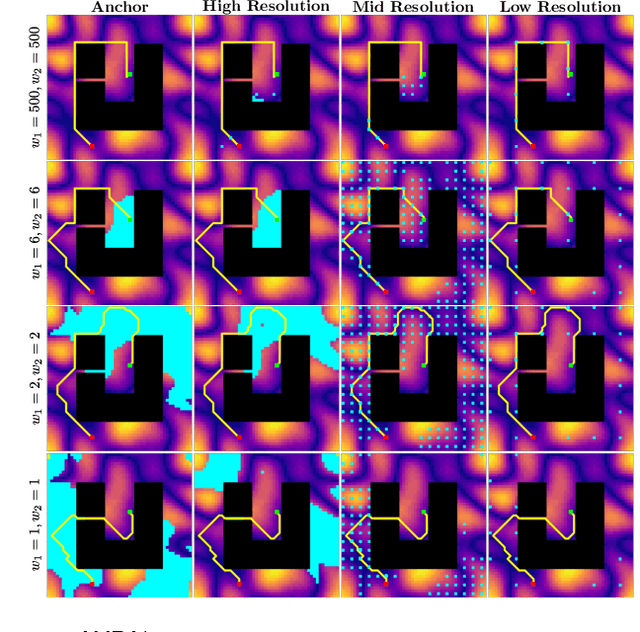
Heuristic search-based motion planning algorithms typically discretise the search space in order to solve the shortest path problem. Their performance is closely related to this discretisation. A fine discretisation allows for better approximations of the continuous search space, but makes the search for a solution more computationally costly. A coarser resolution might allow the algorithms to find solutions quickly at the expense of quality. For large state spaces, it can be beneficial to search for solutions across multiple resolutions even though defining the discretisations is challenging. The recently proposed algorithm Multi-Resolution A* (MRA*) searches over multiple resolutions. It traverses large areas of obstacle-free space and escapes local minima at a coarse resolution. It can also navigate so-called narrow passageways at a finer resolution. In this work, we develop AMRA*, an anytime version of MRA*. AMRA* tries to find a solution quickly using the coarse resolution as much as possible. It then refines the solution by relying on the fine resolution to discover better paths that may not have been available at the coarse resolution. In addition to being anytime, AMRA* can also leverage information sharing between multiple heuristics. We prove that AMRA* is complete and optimal (in-the-limit of time) with respect to the finest resolution. We show its performance on 2D grid navigation and 4D kinodynamic planning problems.
Search-based Planning for Active Sensing in Goal-Directed Coverage Tasks
Nov 14, 2020
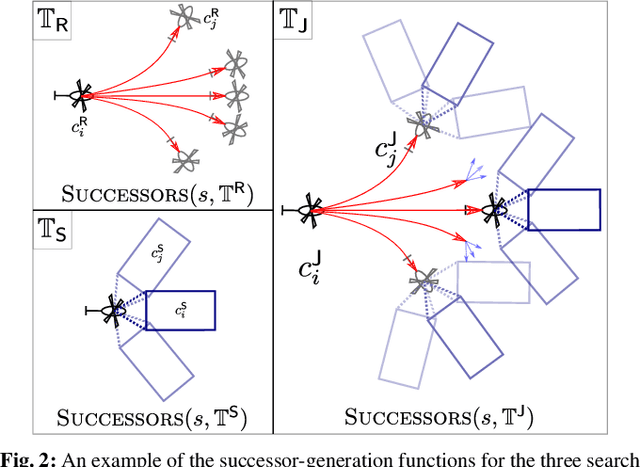

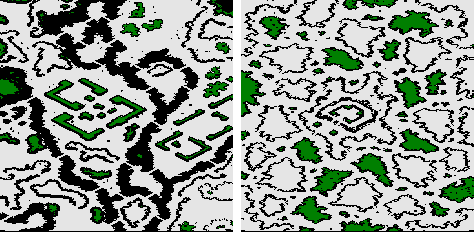
Path planning for robotic coverage is the task of determining a collision-free robot trajectory that observes all points of interest in an environment. Robots employed for such tasks are often capable of exercising active control over onboard observational sensors during navigation. In this paper, we tackle the problem of planning robot and sensor trajectories that maximize information gain in such tasks where the robot needs to cover points of interest with its sensor footprint. Search-based planners in general guarantee completeness and provable bounds on suboptimality with respect to an underlying graph discretization. However, searching for kinodynamically feasible paths in the joint space of robot and sensor state variables with standard search is computationally expensive. We propose two alternative search-based approaches to this problem. The first solves for robot and sensor trajectories independently in decoupled state spaces while maintaining a history of sensor headings during the search. The second is a two-step approach that first quickly computes a solution in decoupled state spaces and then refines it by searching its local neighborhood in the joint space for a better solution. We evaluate our approaches in simulation with a kinodynamically constrained unmanned aerial vehicle performing coverage over a 2D environment and show their benefits.
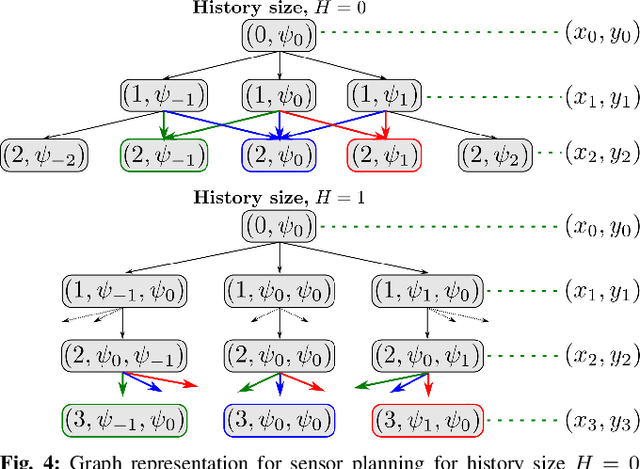
A Planning Framework for Persistent, Multi-UAV Coverage with Global Deconfliction
Aug 27, 2019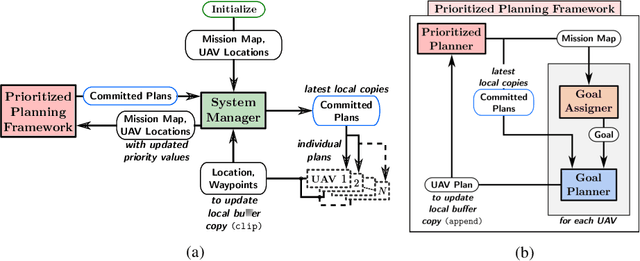
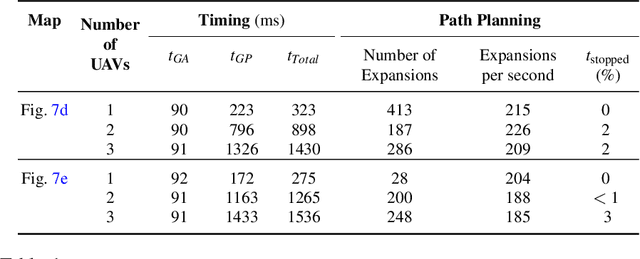
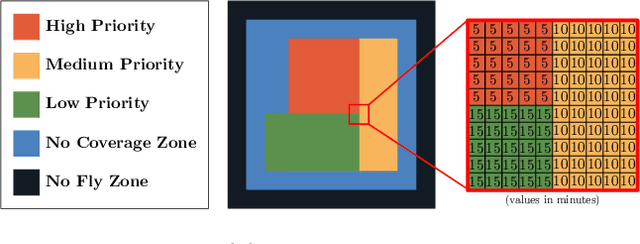
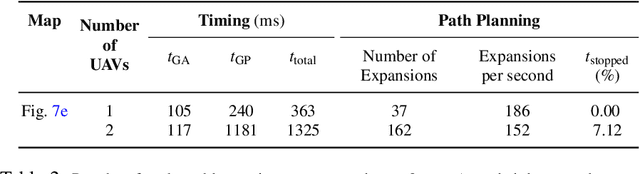
Planning for multi-robot coverage seeks to determine collision-free paths for a fleet of robots, enabling them to collectively observe points of interest in an environment. Persistent coverage is a variant of traditional coverage where coverage-levels in the environment decay over time. Thus, robots have to continuously revisit parts of the environment to maintain a desired coverage-level. Facilitating this in the real world demands we tackle numerous subproblems. While there exist standard solutions to these subproblems, there is no complete framework that addresses all of their individual challenges as a whole in a practical setting. We adapt and combine these solutions to present a planning framework for persistent coverage with multiple unmanned aerial vehicles (UAVs). Specifically, we run a continuous loop of goal assignment and globally deconflicting, kinodynamic path planning for multiple UAVs. We evaluate our framework in simulation as well as the real world. In particular, we demonstrate that (i) our framework exhibits graceful coverage given sufficient resources, we maintain persistent coverage; if resources are insufficient (e.g., having too few UAVs for a given size of the enviornment), coverage-levels decay slowly and (ii) planning with global deconfliction in our framework incurs a negligibly higher price compared to other weaker, more local collision-checking schemes. (Video: https://youtu.be/aqDs6Wymp5Q)