 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge$τ_0$-WM: A Unified Video-Action World Model for Robotic Manipulation
May 31, 2026Robotic manipulation requires models that generate executable actions while anticipating and evaluating their future consequences before physical execution. We present $τ_0$-World Model ($τ_0$-WM), a unified video-action world model that integrates policy learning, video prediction, and action evaluation within a single future-predictive framework. Built on a shared video diffusion backbone, $τ_0$-WM provides two complementary interfaces. First, a video action model jointly predicts future visual latents and continuous action chunks from multi-view observations, language instructions, and robot state. Second, an action-conditioned video simulator rolls out candidate action chunks into multi-view futures and predicts dense task-progress scores. The model is trained on approximately $27{,}300$ hours of real-robot teleoperation, UMI-style interaction, egocentric human videos, and rollout or failure trajectories using modality-specific supervision masks. At inference time, $τ_0$-WM uses test-time computation to sample action candidates, rank them with re-denoising consistency, and invoke simulator-based rectification for low-quality candidates. On challenging long-horizon and fine-grained robotic manipulation tasks, $τ_0$-WM shows superior performance over other relevant baselines.
GE-Sim 2.0: A Roadmap Towards Comprehensive Closed-loop Video World Simulators for Robotic Manipulation
May 26, 2026We introduce GE-Sim 2.0 (Genie Envisioner World Simulator 2.0), a closed-loop video world simulator for robotic manipulation. Building on the action-conditioned video generation framework of Genie Envisioner, GE-Sim 2.0 is re-trained on thousands of hours of real-world robot data spanning teleoperation, contact-rich interaction, and on-robot policy deployment, substantially improving action-following fidelity and trajectory coverage. On top of this foundation, three new modules close the loop from video simulation to policy learning: a state expert that decodes proprioceptive state from video latents to support next-chunk prediction by downstream VLA policies; a world judge that scores generated rollouts against task instructions, yielding machine-verifiable success signals and rewards in place of manual inspection; and an acceleration framework that delivers a 25-frame rollout in 2.3 seconds on a single H100, with up to 4* frame skipping at inference for long-horizon evaluation. GE-Sim 2.0 tops the public WorldArena leaderboard at only 2B parameters, outperforming both dedicated robotic world models and closed-source general video generators, and policies trained against its rollouts and rewards translate into measurable real-world gains, establishing GE-Sim 2.0 as a practical platform for scalable evaluation and closed-loop learning of manipulation policies.
Act2Goal: From World Model To General Goal-conditioned Policy
Dec 29, 2025Specifying robotic manipulation tasks in a manner that is both expressive and precise remains a central challenge. While visual goals provide a compact and unambiguous task specification, existing goal-conditioned policies often struggle with long-horizon manipulation due to their reliance on single-step action prediction without explicit modeling of task progress. We propose Act2Goal, a general goal-conditioned manipulation policy that integrates a goal-conditioned visual world model with multi-scale temporal control. Given a current observation and a target visual goal, the world model generates a plausible sequence of intermediate visual states that captures long-horizon structure. To translate this visual plan into robust execution, we introduce Multi-Scale Temporal Hashing (MSTH), which decomposes the imagined trajectory into dense proximal frames for fine-grained closed-loop control and sparse distal frames that anchor global task consistency. The policy couples these representations with motor control through end-to-end cross-attention, enabling coherent long-horizon behavior while remaining reactive to local disturbances. Act2Goal achieves strong zero-shot generalization to novel objects, spatial layouts, and environments. We further enable reward-free online adaptation through hindsight goal relabeling with LoRA-based finetuning, allowing rapid autonomous improvement without external supervision. Real-robot experiments demonstrate that Act2Goal improves success rates from 30% to 90% on challenging out-of-distribution tasks within minutes of autonomous interaction, validating that goal-conditioned world models with multi-scale temporal control provide structured guidance necessary for robust long-horizon manipulation. Project page: https://act2goal.github.io/
Real2Edit2Real: Generating Robotic Demonstrations via a 3D Control Interface
Dec 22, 2025Recent progress in robot learning has been driven by large-scale datasets and powerful visuomotor policy architectures, yet policy robustness remains limited by the substantial cost of collecting diverse demonstrations, particularly for spatial generalization in manipulation tasks. To reduce repetitive data collection, we present Real2Edit2Real, a framework that generates new demonstrations by bridging 3D editability with 2D visual data through a 3D control interface. Our approach first reconstructs scene geometry from multi-view RGB observations with a metric-scale 3D reconstruction model. Based on the reconstructed geometry, we perform depth-reliable 3D editing on point clouds to generate new manipulation trajectories while geometrically correcting the robot poses to recover physically consistent depth, which serves as a reliable condition for synthesizing new demonstrations. Finally, we propose a multi-conditional video generation model guided by depth as the primary control signal, together with action, edge, and ray maps, to synthesize spatially augmented multi-view manipulation videos. Experiments on four real-world manipulation tasks demonstrate that policies trained on data generated from only 1-5 source demonstrations can match or outperform those trained on 50 real-world demonstrations, improving data efficiency by up to 10-50x. Moreover, experimental results on height and texture editing demonstrate the framework's flexibility and extensibility, indicating its potential to serve as a unified data generation framework.
Genie Envisioner: A Unified World Foundation Platform for Robotic Manipulation
Aug 07, 2025

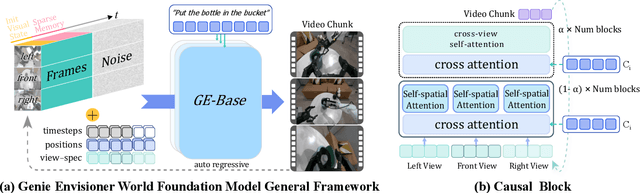
We introduce Genie Envisioner (GE), a unified world foundation platform for robotic manipulation that integrates policy learning, evaluation, and simulation within a single video-generative framework. At its core, GE-Base is a large-scale, instruction-conditioned video diffusion model that captures the spatial, temporal, and semantic dynamics of real-world robotic interactions in a structured latent space. Built upon this foundation, GE-Act maps latent representations to executable action trajectories through a lightweight, flow-matching decoder, enabling precise and generalizable policy inference across diverse embodiments with minimal supervision. To support scalable evaluation and training, GE-Sim serves as an action-conditioned neural simulator, producing high-fidelity rollouts for closed-loop policy development. The platform is further equipped with EWMBench, a standardized benchmark suite measuring visual fidelity, physical consistency, and instruction-action alignment. Together, these components establish Genie Envisioner as a scalable and practical foundation for instruction-driven, general-purpose embodied intelligence. All code, models, and benchmarks will be released publicly.
EnerVerse-AC: Envisioning Embodied Environments with Action Condition
May 14, 2025Robotic imitation learning has advanced from solving static tasks to addressing dynamic interaction scenarios, but testing and evaluation remain costly and challenging due to the need for real-time interaction with dynamic environments. We propose EnerVerse-AC (EVAC), an action-conditional world model that generates future visual observations based on an agent's predicted actions, enabling realistic and controllable robotic inference. Building on prior architectures, EVAC introduces a multi-level action-conditioning mechanism and ray map encoding for dynamic multi-view image generation while expanding training data with diverse failure trajectories to improve generalization. As both a data engine and evaluator, EVAC augments human-collected trajectories into diverse datasets and generates realistic, action-conditioned video observations for policy testing, eliminating the need for physical robots or complex simulations. This approach significantly reduces costs while maintaining high fidelity in robotic manipulation evaluation. Extensive experiments validate the effectiveness of our method. Code, checkpoints, and datasets can be found at <https://annaj2178.github.io/EnerverseAC.github.io>.
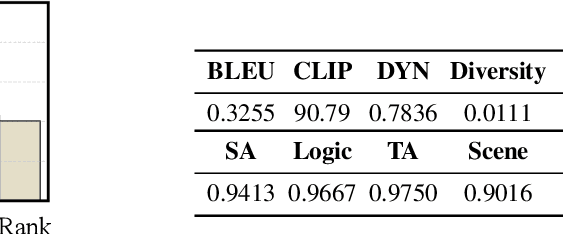
EWMBench: Evaluating Scene, Motion, and Semantic Quality in Embodied World Models
May 14, 2025Recent advances in creative AI have enabled the synthesis of high-fidelity images and videos conditioned on language instructions. Building on these developments, text-to-video diffusion models have evolved into embodied world models (EWMs) capable of generating physically plausible scenes from language commands, effectively bridging vision and action in embodied AI applications. This work addresses the critical challenge of evaluating EWMs beyond general perceptual metrics to ensure the generation of physically grounded and action-consistent behaviors. We propose the Embodied World Model Benchmark (EWMBench), a dedicated framework designed to evaluate EWMs based on three key aspects: visual scene consistency, motion correctness, and semantic alignment. Our approach leverages a meticulously curated dataset encompassing diverse scenes and motion patterns, alongside a comprehensive multi-dimensional evaluation toolkit, to assess and compare candidate models. The proposed benchmark not only identifies the limitations of existing video generation models in meeting the unique requirements of embodied tasks but also provides valuable insights to guide future advancements in the field. The dataset and evaluation tools are publicly available at https://github.com/AgibotTech/EWMBench.
EnerVerse: Envisioning Embodied Future Space for Robotics Manipulation
Jan 03, 2025



We introduce EnerVerse, a comprehensive framework for embodied future space generation specifically designed for robotic manipulation tasks. EnerVerse seamlessly integrates convolutional and bidirectional attention mechanisms for inner-chunk space modeling, ensuring low-level consistency and continuity. Recognizing the inherent redundancy in video data, we propose a sparse memory context combined with a chunkwise unidirectional generative paradigm to enable the generation of infinitely long sequences. To further augment robotic capabilities, we introduce the Free Anchor View (FAV) space, which provides flexible perspectives to enhance observation and analysis. The FAV space mitigates motion modeling ambiguity, removes physical constraints in confined environments, and significantly improves the robot's generalization and adaptability across various tasks and settings. To address the prohibitive costs and labor intensity of acquiring multi-camera observations, we present a data engine pipeline that integrates a generative model with 4D Gaussian Splatting (4DGS). This pipeline leverages the generative model's robust generalization capabilities and the spatial constraints provided by 4DGS, enabling an iterative enhancement of data quality and diversity, thus creating a data flywheel effect that effectively narrows the sim-to-real gap. Finally, our experiments demonstrate that the embodied future space generation prior substantially enhances policy predictive capabilities, resulting in improved overall performance, particularly in long-range robotic manipulation tasks.
DARC: Distribution-Aware Re-Coloring Model for Generalizable Nucleus Segmentation
Sep 01, 2023Nucleus segmentation is usually the first step in pathological image analysis tasks. Generalizable nucleus segmentation refers to the problem of training a segmentation model that is robust to domain gaps between the source and target domains. The domain gaps are usually believed to be caused by the varied image acquisition conditions, e.g., different scanners, tissues, or staining protocols. In this paper, we argue that domain gaps can also be caused by different foreground (nucleus)-background ratios, as this ratio significantly affects feature statistics that are critical to normalization layers. We propose a Distribution-Aware Re-Coloring (DARC) model that handles the above challenges from two perspectives. First, we introduce a re-coloring method that relieves dramatic image color variations between different domains. Second, we propose a new instance normalization method that is robust to the variation in foreground-background ratios. We evaluate the proposed methods on two H$\&$E stained image datasets, named CoNSeP and CPM17, and two IHC stained image datasets, called DeepLIIF and BC-DeepLIIF. Extensive experimental results justify the effectiveness of our proposed DARC model. Codes are available at \url{https://github.com/csccsccsccsc/DARC
CPP-Net: Context-aware Polygon Proposal Network for Nucleus Segmentation
Feb 13, 2021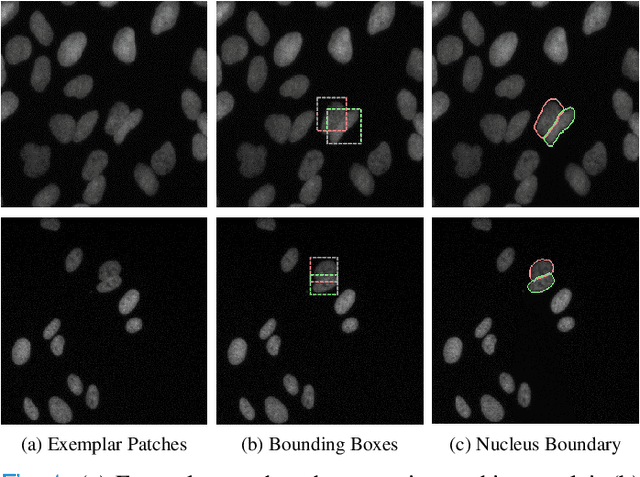
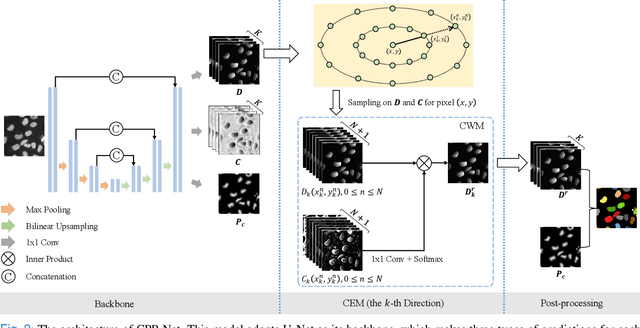
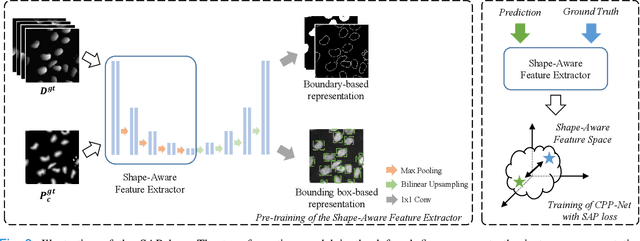
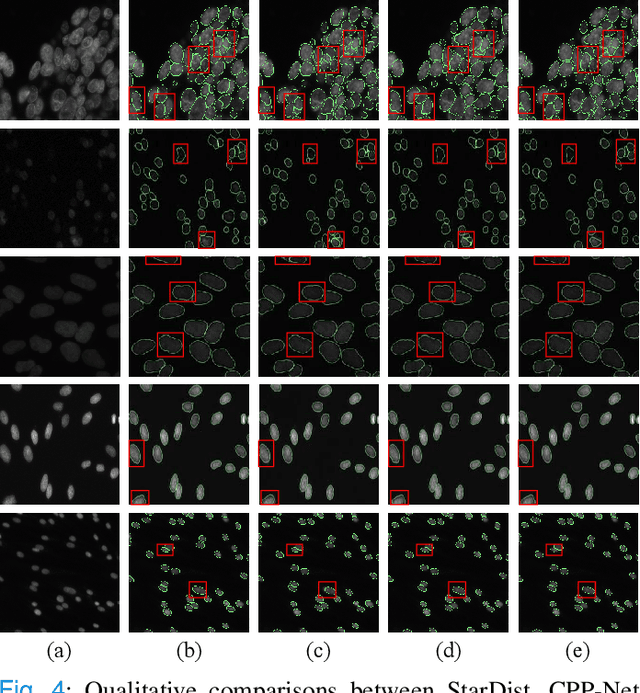
Nucleus segmentation is a challenging task due to the crowded distribution and blurry boundaries of nuclei. Recent approaches represent nuclei by means of polygons to differentiate between touching and overlapping nuclei and have accordingly achieved promising performance. Each polygon is represented by a set of centroid-to-boundary distances, which are in turn predicted by features of the centroid pixel for a single nucleus. However, using the centroid pixel alone does not provide sufficient contextual information for robust prediction. To handle this problem, we propose a Context-aware Polygon Proposal Network (CPP-Net) for nucleus segmentation. First, we sample a point set rather than one single pixel within each cell for distance prediction. This strategy substantially enhances contextual information and thereby improves the robustness of the prediction. Second, we propose a Confidence-based Weighting Module, which adaptively fuses the predictions from the sampled point set. Third, we introduce a novel Shape-Aware Perceptual (SAP) loss that constrains the shape of the predicted polygons. Here, the SAP loss is based on an additional network that is pre-trained by means of mapping the centroid probability map and the pixel-to-boundary distance maps to a different nucleus representation. Extensive experiments justify the effectiveness of each component in the proposed CPP-Net. Finally, CPP-Net is found to achieve state-of-the-art performance on three publicly available databases, namely DSB2018, BBBC06, and PanNuke. Code of this paper will be released.