 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-convex Programming for Discrete Latent Factor Models Prototyping
Apr 02, 2025Discrete latent factor models (DLFMs) are widely used in various domains such as machine learning, economics, neuroscience, psychology, etc. Currently, fitting a DLFM to some dataset relies on a customized solver for individual models, which requires lots of effort to implement and is limited to the targeted specific instance of DLFMs. In this paper, we propose a generic framework based on CVXPY, which allows users to specify and solve the fitting problem of a wide range of DLFMs, including both regression and classification models, within a very short script. Our framework is flexible and inherently supports the integration of regularization terms and constraints on the DLFM parameters and latent factors, such that the users can easily prototype the DLFM structure according to their dataset and application scenario. We introduce our open-source Python implementation and illustrate the framework in several examples.
BYE: Build Your Encoder with One Sequence of Exploration Data for Long-Term Dynamic Scene Understanding
Dec 03, 2024Dynamic scene understanding remains a persistent challenge in robotic applications. Early dynamic mapping methods focused on mitigating the negative influence of short-term dynamic objects on camera motion estimation by masking or tracking specific categories, which often fall short in adapting to long-term scene changes. Recent efforts address object association in long-term dynamic environments using neural networks trained on synthetic datasets, but they still rely on predefined object shapes and categories. Other methods incorporate visual, geometric, or semantic heuristics for the association but often lack robustness. In this work, we introduce BYE, a class-agnostic, per-scene point cloud encoder that removes the need for predefined categories, shape priors, or extensive association datasets. Trained on only a single sequence of exploration data, BYE can efficiently perform object association in dynamically changing scenes. We further propose an ensembling scheme combining the semantic strengths of Vision Language Models (VLMs) with the scene-specific expertise of BYE, achieving a 7% improvement and a 95% success rate in object association tasks. Code and dataset are available at https://byencoder.github.io.
Single-Agent Actor Critic for Decentralized Cooperative Driving
Mar 18, 2024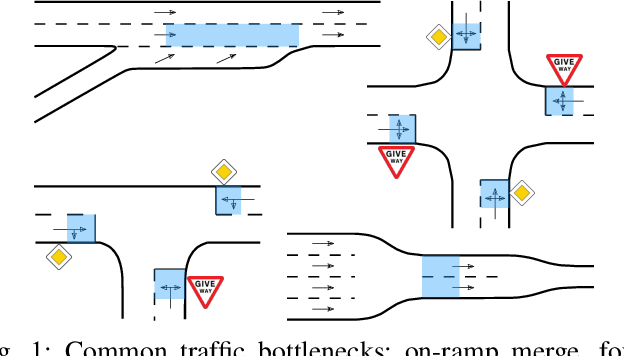
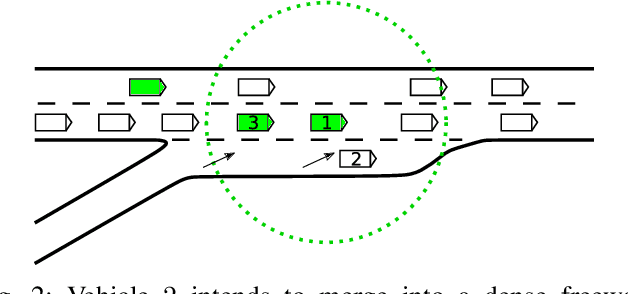
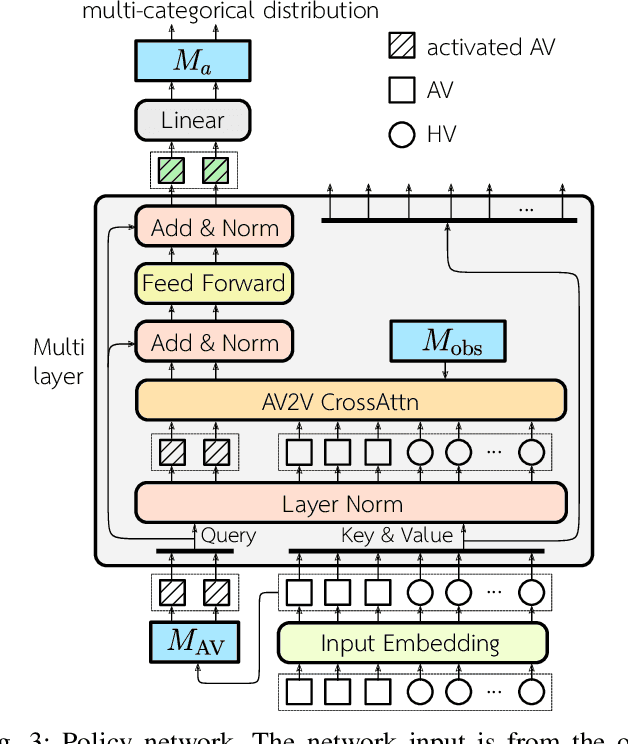
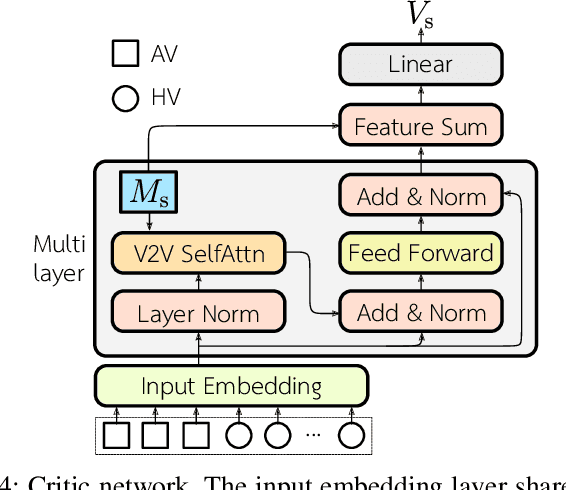
Active traffic management incorporating autonomous vehicles (AVs) promises a future with diminished congestion and enhanced traffic flow. However, developing algorithms for real-world application requires addressing the challenges posed by continuous traffic flow and partial observability. To bridge this gap and advance the field of active traffic management towards greater decentralization, we introduce a novel asymmetric actor-critic model aimed at learning decentralized cooperative driving policies for autonomous vehicles using single-agent reinforcement learning. Our approach employs attention neural networks with masking to handle the dynamic nature of real-world traffic flow and partial observability. Through extensive evaluations against baseline controllers across various traffic scenarios, our model shows great potential for improving traffic flow at diverse bottleneck locations within the road system. Additionally, we explore the challenge associated with the conservative driving behaviors of autonomous vehicles that adhere strictly to traffic regulations. The experiment results illustrate that our proposed cooperative policy can mitigate potential traffic slowdowns without compromising safety.
Geometric Regularity with Robot Intrinsic Symmetry in Reinforcement Learning
Jun 28, 2023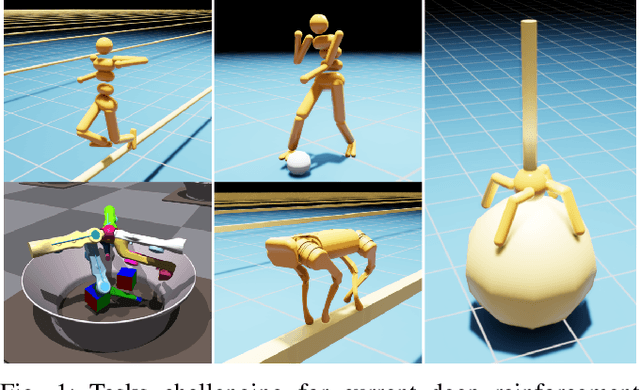
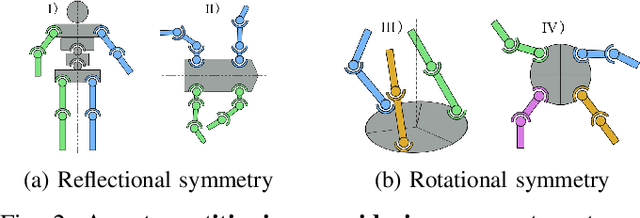
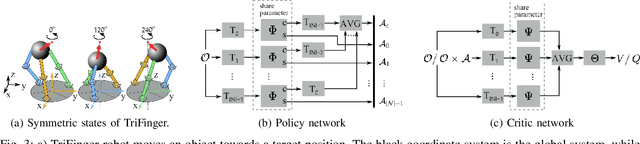

Geometric regularity, which leverages data symmetry, has been successfully incorporated into deep learning architectures such as CNNs, RNNs, GNNs, and Transformers. While this concept has been widely applied in robotics to address the curse of dimensionality when learning from high-dimensional data, the inherent reflectional and rotational symmetry of robot structures has not been adequately explored. Drawing inspiration from cooperative multi-agent reinforcement learning, we introduce novel network structures for deep learning algorithms that explicitly capture this geometric regularity. Moreover, we investigate the relationship between the geometric prior and the concept of Parameter Sharing in multi-agent reinforcement learning. Through experiments conducted on various challenging continuous control tasks, we demonstrate the significant potential of the proposed geometric regularity in enhancing robot learning capabilities.
Courteous Behavior of Automated Vehicles at Unsignalized Intersections via Reinforcement Learning
Jun 11, 2021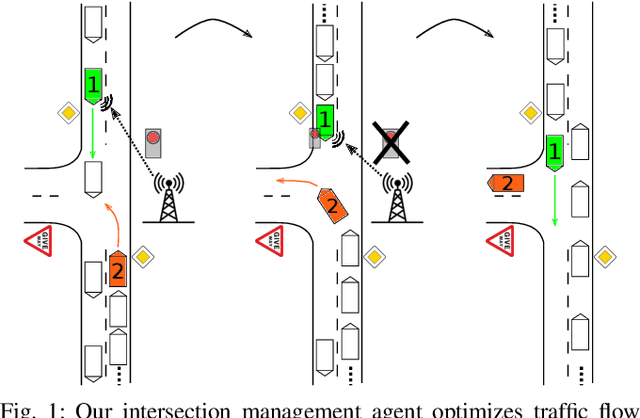
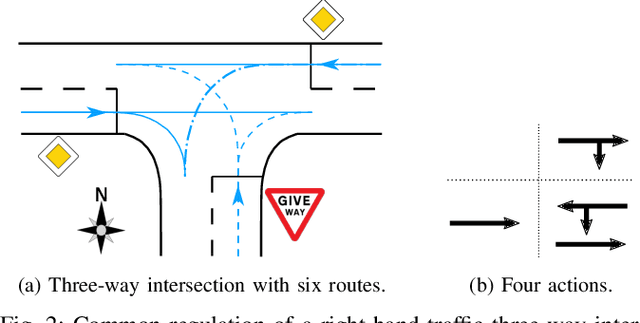
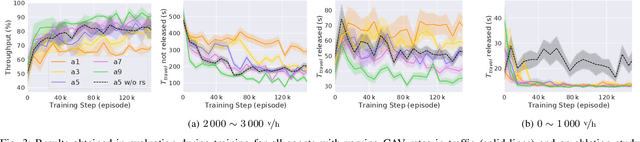
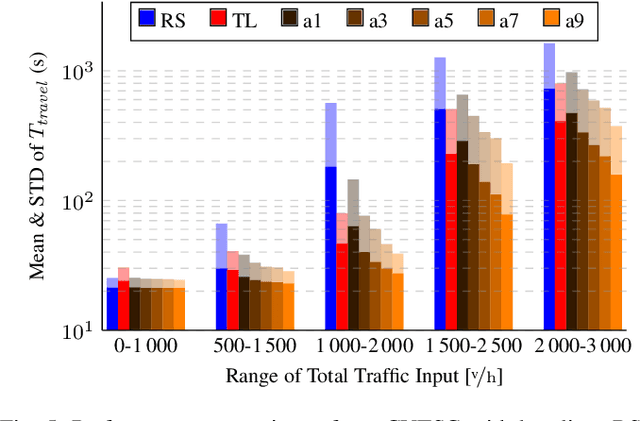
The transition from today's mostly human-driven traffic to a purely automated one will be a gradual evolution, with the effect that we will likely experience mixed traffic in the near future. Connected and automated vehicles can benefit human-driven ones and the whole traffic system in different ways, for example by improving collision avoidance and reducing traffic waves. Many studies have been carried out to improve intersection management, a significant bottleneck in traffic, with intelligent traffic signals or exclusively automated vehicles. However, the problem of how to improve mixed traffic at unsignalized intersections has received less attention. In this paper, we propose a novel approach to optimizing traffic flow at intersections in mixed traffic situations using deep reinforcement learning. Our reinforcement learning agent learns a policy for a centralized controller to let connected autonomous vehicles at unsignalized intersections give up their right of way and yield to other vehicles to optimize traffic flow. We implemented our approach and tested it in the traffic simulator SUMO based on simulated and real traffic data. The experimental evaluation demonstrates that our method significantly improves traffic flow through unsignalized intersections in mixed traffic settings and also provides better performance on a wide range of traffic situations compared to the state-of-the-art traffic signal controller for the corresponding signalized intersection.
Efficiency and Equity are Both Essential: A Generalized Traffic Signal Controller with Deep Reinforcement Learning
Mar 09, 2020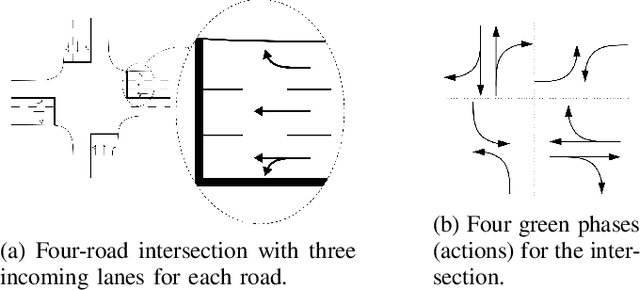
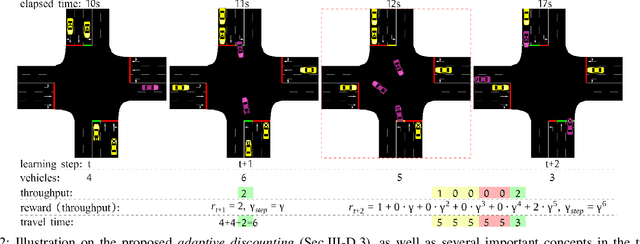
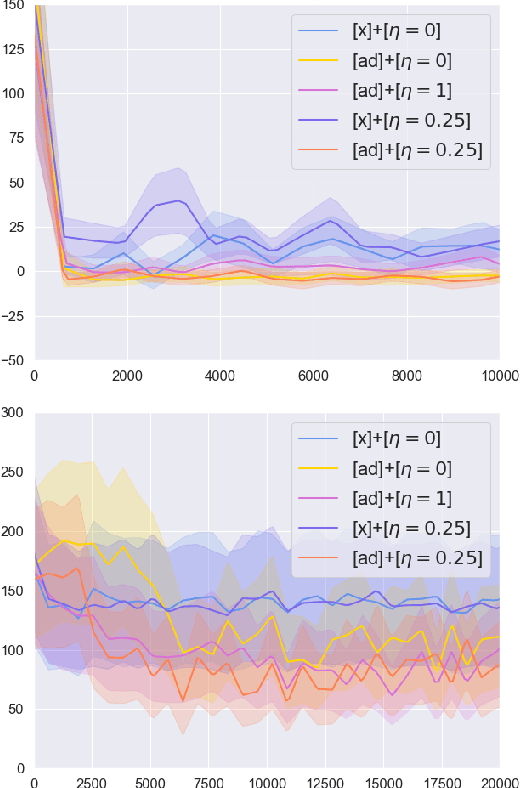
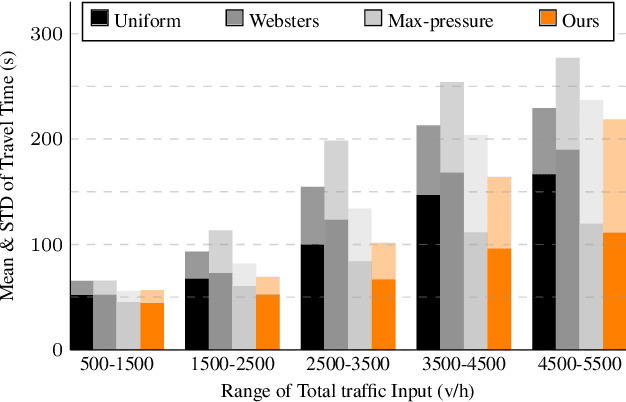
Traffic signal controllers play an essential role in the traffic system, while the current majority of them are not sufficiently flexible or adaptive to make optimal traffic schedules. In this paper we present an approach to learn policies for the signal controllers using deep reinforcement learning. Our method uses a novel formulation of the reward function that simultaneously considers efficiency and equity. We furthermore present a general approach to find the bound for the proposed equity factor. Moreover, we introduce the adaptive discounting approach that greatly stabilizes learning, which helps to keep high flexibility of green light duration. The experimental evaluations on both simulated and real-world data demonstrate that our proposed algorithm achieves state-of-the-art performance (previously held by traditional non-learning methods) on a wide range of traffic situations. A video of our experimental results can be found at: https://youtu.be/3rc5-ac3XX0