 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSingle-Agent Actor Critic for Decentralized Cooperative Driving
Paper and Code
Mar 18, 2024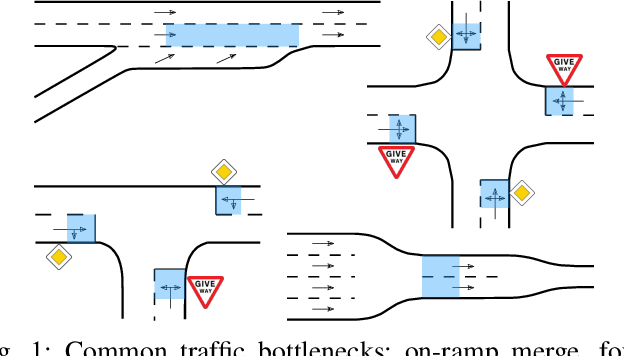
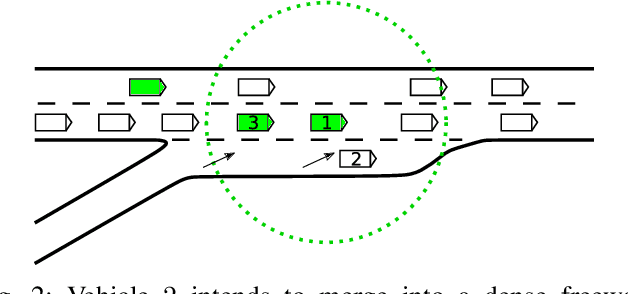
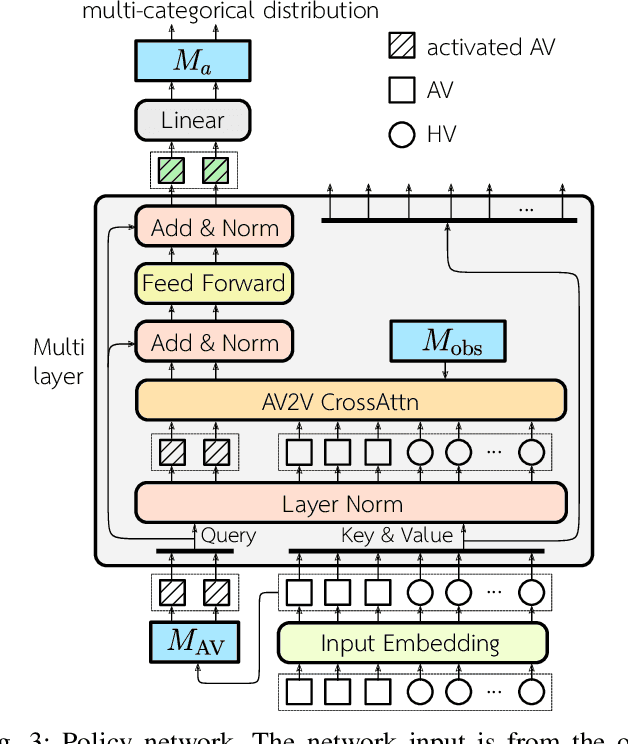
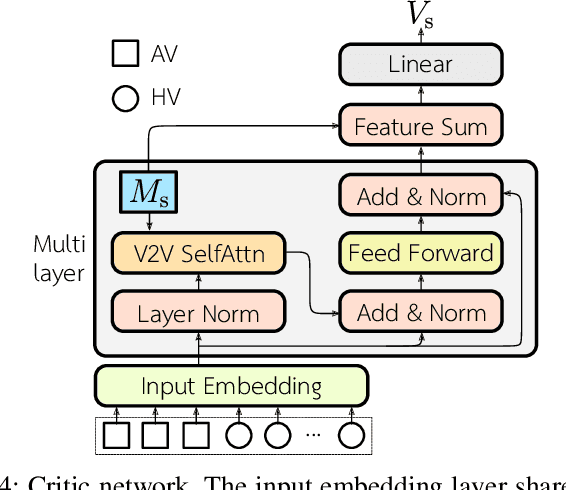
Active traffic management incorporating autonomous vehicles (AVs) promises a future with diminished congestion and enhanced traffic flow. However, developing algorithms for real-world application requires addressing the challenges posed by continuous traffic flow and partial observability. To bridge this gap and advance the field of active traffic management towards greater decentralization, we introduce a novel asymmetric actor-critic model aimed at learning decentralized cooperative driving policies for autonomous vehicles using single-agent reinforcement learning. Our approach employs attention neural networks with masking to handle the dynamic nature of real-world traffic flow and partial observability. Through extensive evaluations against baseline controllers across various traffic scenarios, our model shows great potential for improving traffic flow at diverse bottleneck locations within the road system. Additionally, we explore the challenge associated with the conservative driving behaviors of autonomous vehicles that adhere strictly to traffic regulations. The experiment results illustrate that our proposed cooperative policy can mitigate potential traffic slowdowns without compromising safety.