 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeometric Regularity with Robot Intrinsic Symmetry in Reinforcement Learning
Paper and Code
Jun 28, 2023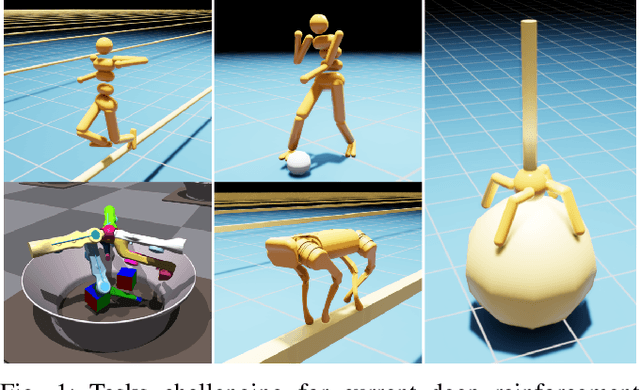
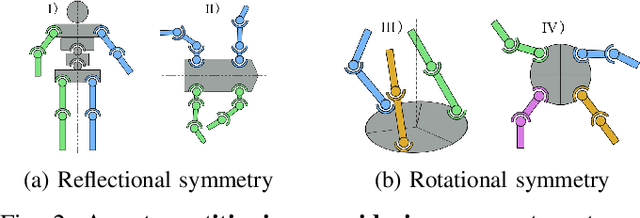
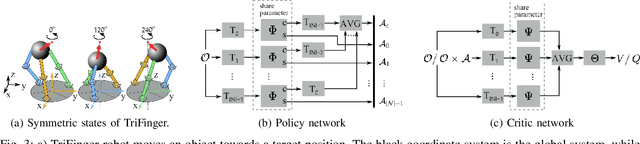

Geometric regularity, which leverages data symmetry, has been successfully incorporated into deep learning architectures such as CNNs, RNNs, GNNs, and Transformers. While this concept has been widely applied in robotics to address the curse of dimensionality when learning from high-dimensional data, the inherent reflectional and rotational symmetry of robot structures has not been adequately explored. Drawing inspiration from cooperative multi-agent reinforcement learning, we introduce novel network structures for deep learning algorithms that explicitly capture this geometric regularity. Moreover, we investigate the relationship between the geometric prior and the concept of Parameter Sharing in multi-agent reinforcement learning. Through experiments conducted on various challenging continuous control tasks, we demonstrate the significant potential of the proposed geometric regularity in enhancing robot learning capabilities.