 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Faithful Agentic XAI: A Verification Method and an Open-World Benchmark for Better Model Faithfulness
May 27, 2026Explainable AI (XAI) helps users interpret model behavior and identify potential faults. Agentic XAI systems use Large Language Models (LLMs) to make explanations more accessible through natural-language interaction, but they can also produce plausible yet unfaithful explanations. This risk arises because unreliable XAI outputs for complex models can be amplified by LLMs and mislead users. We propose Faithful Agentic XAI (FAX), a framework that improves explanation faithfulness through explicit verification. FAX decomposes draft explanations into claims and cross-checks them against inherently faithful tools, filtering unsupported or contradictory claims before final generation. We also introduce CRAFTER-XAI-Bench, an open-world reinforcement learning benchmark with complex policies, diverse goals, and challenging scenarios for assessing model-specific faithfulness. On CRAFTER-XAI-Bench, FAX improves simulation faithfulness from 0.20 for the strongest baseline to 0.46 while maintaining high informativeness, relevance, and fluency. On three tabular benchmarks, FAX performs competitively with prior Agentic XAI baselines, but our analysis shows that these settings can conflate task accuracy with model-specific faithfulness. These findings show that explicit verification is essential for faithful Agentic XAI and that that faithfulness benchmarks must be designed to test explanations against the behavior of the target model itself.
Proactive Instance Navigation with Comparative Judgment for Ambiguous User Queries
May 07, 2026Natural-language instance navigation becomes challenging when the initial user request does not uniquely specify the target instance. A practical agent should reduce the user's burden by actively asking only the information needed to distinguish the target from similar distractors, rather than requiring a detailed description upfront. Existing approaches often fall short of this goal: they may stop at the first plausible candidate before sufficiently exploring alternatives, or, even after collecting multiple candidates, ask about the target's attributes derived from individual candidates rather than questions selected to distinguish candidates in the pool. As a result, despite the dialogue, the agent may still fail to distinguish the target from distractors, leading to premature decisions and lengthy user responses. We propose Proactive Instance Navigation with Comparative Judgment (ProCompNav), a two-stage framework that first constructs a candidate pool and then identifies the target through comparative judgment. At each round, ProCompNav extracts an attribute-value pair that splits the current pool, asks a binary yes/no question, and prunes all inconsistent candidates at once. This reframes disambiguation from open-ended target description to pool-level discriminative questioning, where each question is chosen to narrow the candidate set. On CoIN-Bench, ProCompNav improves Success Rate over interactive baselines with the same minimal input and non-interactive baselines with detailed descriptions, while substantially reducing Response Length. ProCompNav also achieves state-of-the-art Success Rate on TextNav, suggesting that comparative judgment is broadly useful for instance-level navigation among similar distractors.
Don't Just Follow MLLM Plans: Robust and Efficient Planning for Open-world Agents
May 30, 2025



Developing autonomous agents capable of mastering complex, multi-step tasks in unpredictable, interactive environments presents a significant challenge. While Large Language Models (LLMs) offer promise for planning, existing approaches often rely on problematic internal knowledge or make unrealistic environmental assumptions. Although recent work explores learning planning knowledge, they still retain limitations due to partial reliance on external knowledge or impractical setups. Indeed, prior research has largely overlooked developing agents capable of acquiring planning knowledge from scratch, directly in realistic settings. While realizing this capability is necessary, it presents significant challenges, primarily achieving robustness given the substantial risk of incorporating LLMs' inaccurate knowledge. Moreover, efficiency is crucial for practicality as learning can demand prohibitive exploration. In response, we introduce Robust and Efficient Planning for Open-world Agents (REPOA), a novel framework designed to tackle these issues. REPOA features three key components: adaptive dependency learning and fine-grained failure-aware operation memory to enhance robustness to knowledge inaccuracies, and difficulty-based exploration to improve learning efficiency. Our evaluation in two established open-world testbeds demonstrates REPOA's robust and efficient planning, showcasing its capability to successfully obtain challenging late-game items that were beyond the reach of prior approaches.
Active Preference-based Learning for Multi-dimensional Personalization
Nov 01, 2024



Large language models (LLMs) have shown remarkable versatility across tasks, but aligning them with individual human preferences remains challenging due to the complexity and diversity of these preferences. Existing methods often overlook the fact that preferences are multi-objective, diverse, and hard to articulate, making full alignment difficult. In response, we propose an active preference learning framework that uses binary feedback to estimate user preferences across multiple objectives. Our approach leverages Bayesian inference to update preferences efficiently and reduces user feedback through an acquisition function that optimally selects queries. Additionally, we introduce a parameter to handle feedback noise and improve robustness. We validate our approach through theoretical analysis and experiments on language generation tasks, demonstrating its feedback efficiency and effectiveness in personalizing model responses.
Multi-Agent Path Finding with Real Robot Dynamics and Interdependent Tasks for Automated Warehouses
Aug 26, 2024Multi-Agent Path Finding (MAPF) is an important optimization problem underlying the deployment of robots in automated warehouses and factories. Despite the large body of work on this topic, most approaches make heavy simplifications, both on the environment and the agents, which make the resulting algorithms impractical for real-life scenarios. In this paper, we consider a realistic problem of online order delivery in a warehouse, where a fleet of robots bring the products belonging to each order from shelves to workstations. This creates a stream of inter-dependent pickup and delivery tasks and the associated MAPF problem consists of computing realistic collision-free robot trajectories fulfilling these tasks. To solve this MAPF problem, we propose an extension of the standard Prioritized Planning algorithm to deal with the inter-dependent tasks (Interleaved Prioritized Planning) and a novel Via-Point Star (VP*) algorithm to compute an optimal dynamics-compliant robot trajectory to visit a sequence of goal locations while avoiding moving obstacles. We prove the completeness of our approach and evaluate it in simulation as well as in a real warehouse.
Using Linearized Optimal Transport to Predict the Evolution of Stochastic Particle Systems
Aug 03, 2024



We develop an algorithm to approximate the time evolution of a probability measure without explicitly learning an operator that governs the evolution. A particular application of interest is discrete measures $\mu_t^N$ that arise from particle systems. In many such situations, the individual particles move chaotically on short time scales, making it difficult to learn the dynamics of a governing operator, but the bulk distribution $\mu_t^N$ approximates an absolutely continuous measure $\mu_t$ that evolves ``smoothly.'' If $\mu_t$ is known on some time interval, then linearized optimal transport theory provides an Euler-like scheme for approximating the evolution of $\mu_t$ using its ``tangent vector field'' (represented as a time-dependent vector field on $\mathbb R^d$), which can be computed as a limit of optimal transport maps. We propose an analog of this Euler approximation to predict the evolution of the discrete measure $\mu_t^N$ (without knowing $\mu_t$). To approximate the analogous tangent vector field, we use a finite difference over a time step that sits between the two time scales of the system -- long enough for the large-$N$ evolution ($\mu_t$) to emerge but short enough to satisfactorily approximate the derivative object used in the Euler scheme. By allowing the limiting behavior to emerge, the optimal transport maps closely approximate the vector field describing the bulk distribution's smooth evolution instead of the individual particles' more chaotic movements. We demonstrate the efficacy of this approach with two illustrative examples, Gaussian diffusion and a cell chemotaxis model, and show that our method succeeds in predicting the bulk behavior over relatively large steps.
Learning black- and gray-box chemotactic PDEs/closures from agent based Monte Carlo simulation data
May 26, 2022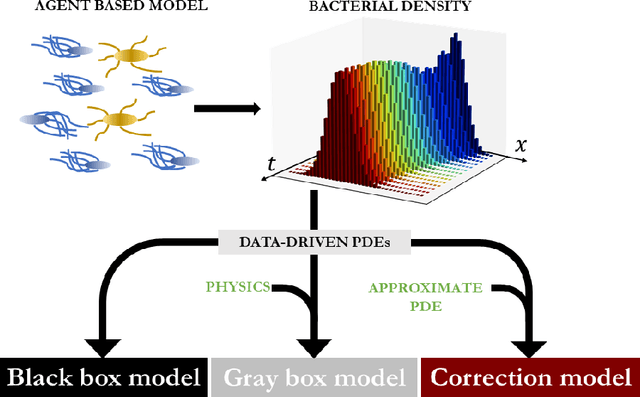
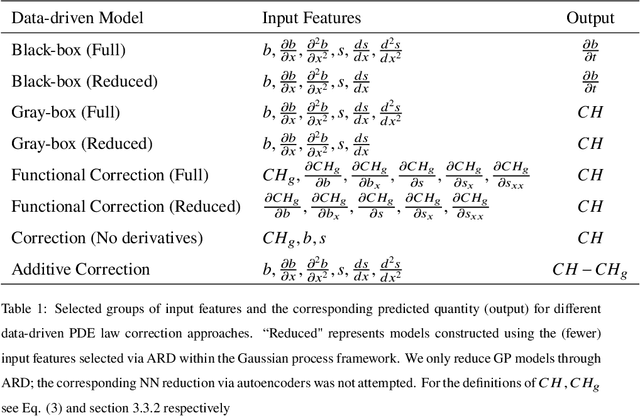
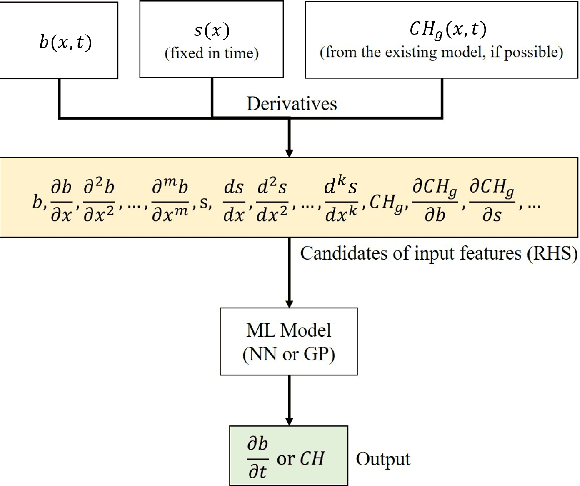
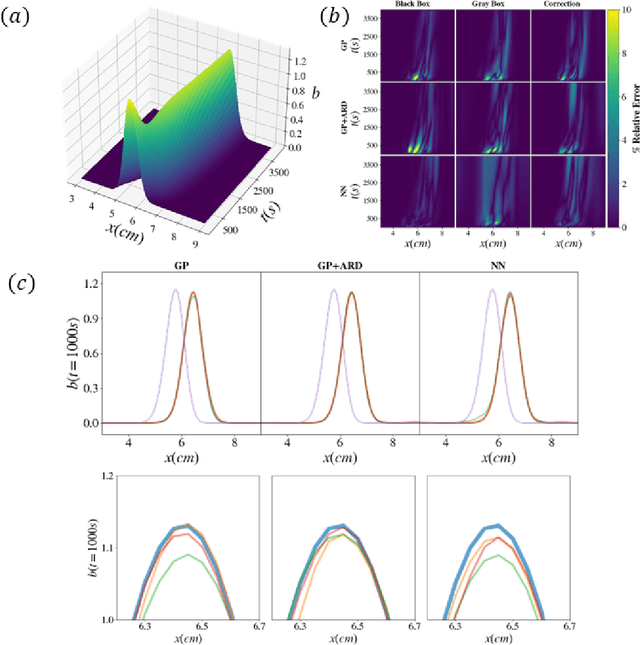
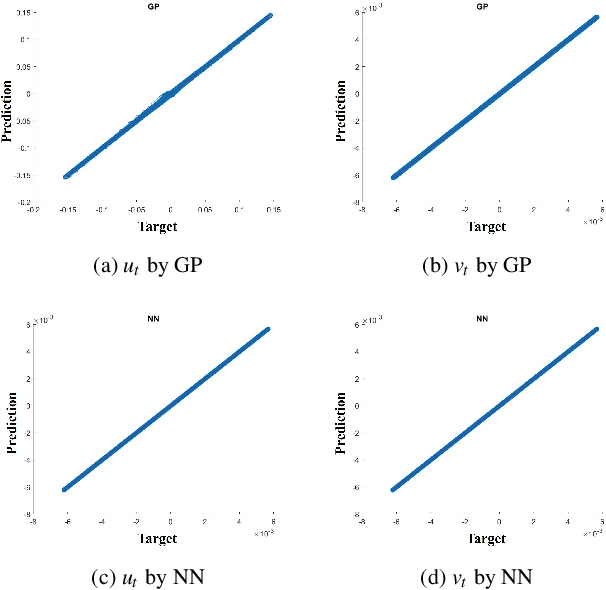
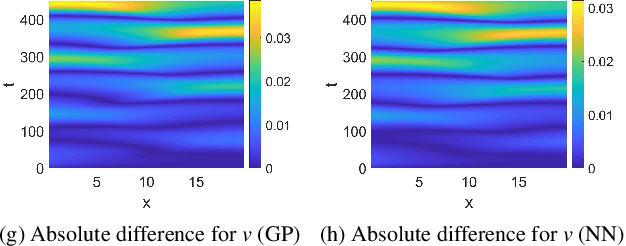
We propose a machine learning framework for the data-driven discovery of macroscopic chemotactic Partial Differential Equations (PDEs) -- and the closures that lead to them -- from high-fidelity, individual-based stochastic simulations of E.coli bacterial motility. The fine scale, detailed, hybrid (continuum - Monte Carlo) simulation model embodies the underlying biophysics, and its parameters are informed from experimental observations of individual cells. We exploit Automatic Relevance Determination (ARD) within a Gaussian Process framework for the identification of a parsimonious set of collective observables that parametrize the law of the effective PDEs. Using these observables, in a second step we learn effective, coarse-grained "Keller-Segel class" chemotactic PDEs using machine learning regressors: (a) (shallow) feedforward neural networks and (b) Gaussian Processes. The learned laws can be black-box (when no prior knowledge about the PDE law structure is assumed) or gray-box when parts of the equation (e.g. the pure diffusion part) is known and "hardwired" in the regression process. We also discuss data-driven corrections (both additive and functional) of analytically known, approximate closures.
Multi-armed Bandit Algorithm against Strategic Replication
Oct 23, 2021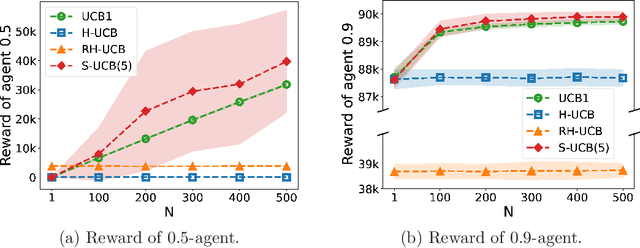
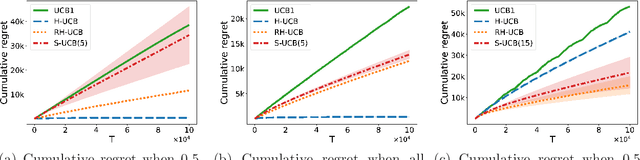
We consider a multi-armed bandit problem in which a set of arms is registered by each agent, and the agent receives reward when its arm is selected. An agent might strategically submit more arms with replications, which can bring more reward by abusing the bandit algorithm's exploration-exploitation balance. Our analysis reveals that a standard algorithm indeed fails at preventing replication and suffers from linear regret in time $T$. We aim to design a bandit algorithm which demotivates replications and also achieves a small cumulative regret. We devise Hierarchical UCB (H-UCB) of replication-proof, which has $O(\ln T)$-regret under any equilibrium. We further propose Robust Hierarchical UCB (RH-UCB) which has a sublinear regret even in a realistic scenario with irrational agents replicating careless. We verify our theoretical findings through numerical experiments.
Coarse-scale PDEs from fine-scale observations via machine learning
Sep 12, 2019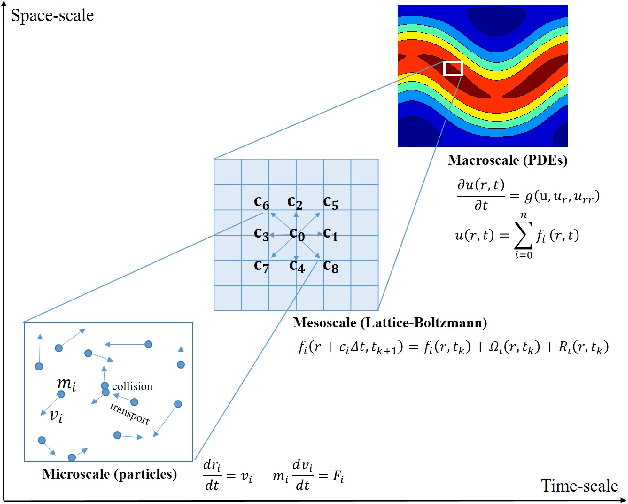
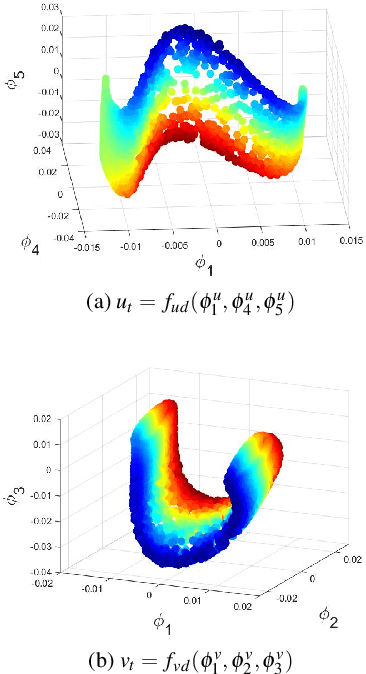
Complex spatiotemporal dynamics of physicochemical processes are often modeled at a microscopic level (through e.g. atomistic, agent-based or lattice models) based on first principles. Some of these processes can also be successfully modeled at the macroscopic level using e.g. partial differential equations (PDEs) describing the evolution of the right few macroscopic observables (e.g. concentration and momentum fields). Deriving good macroscopic descriptions (the so-called "closure problem") is often a time-consuming process requiring deep understanding/intuition about the system of interest. Recent developments in data science provide alternative ways to effectively extract/learn accurate macroscopic descriptions approximating the underlying microscopic observations. In this paper, we introduce a data-driven framework for the identification of unavailable coarse-scale PDEs from microscopic observations via machine learning algorithms. Specifically, using Gaussian Processes, Artificial Neural Networks, and/or Diffusion Maps, the proposed framework uncovers the relation between the relevant macroscopic space fields and their time evolution (the right-hand-side of the explicitly unavailable macroscopic PDE). Interestingly, several choices equally representative of the data can be discovered. The framework will be illustrated through the data-driven discovery of macroscopic, concentration-level PDEs resulting from a fine-scale, Lattice Boltzmann level model of a reaction/transport process. Once the coarse evolution law is identified, it can be simulated to produce long-term macroscopic predictions. Different features (pros as well as cons) of alternative machine learning algorithms for performing this task (Gaussian Processes and Artificial Neural Networks), are presented and discussed.
Linking Gaussian Process regression with data-driven manifold embeddings for nonlinear data fusion
Dec 16, 2018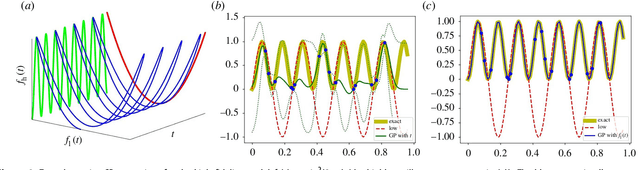
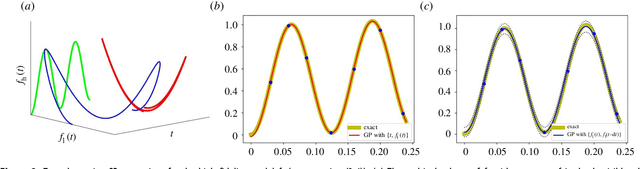
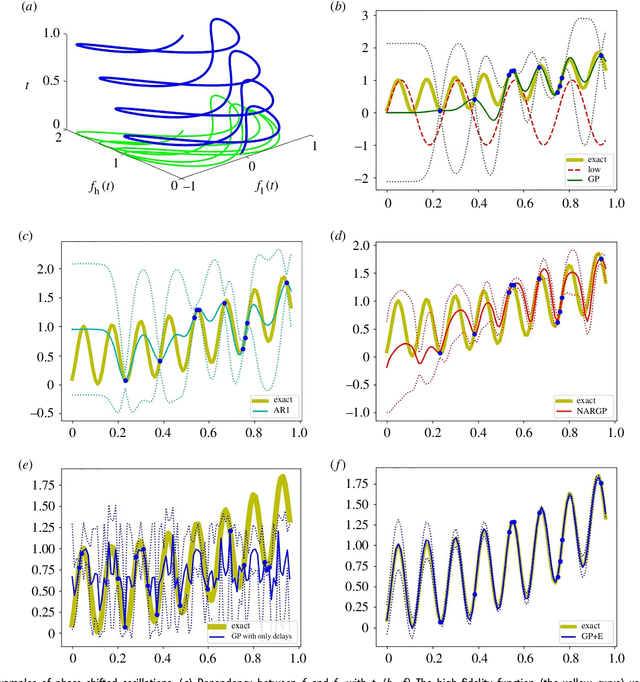
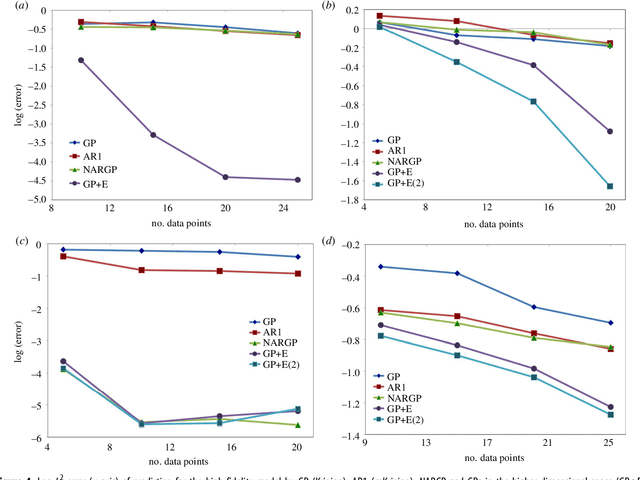
In statistical modeling with Gaussian Process regression, it has been shown that combining (few) high-fidelity data with (many) low-fidelity data can enhance prediction accuracy, compared to prediction based on the few high-fidelity data only. Such information fusion techniques for multifidelity data commonly approach the high-fidelity model $f_h(t)$ as a function of two variables $(t,y)$, and then using $f_l(t)$ as the $y$ data. More generally, the high-fidelity model can be written as a function of several variables $(t,y_1,y_2....)$; the low-fidelity model $f_l$ and, say, some of its derivatives, can then be substituted for these variables. In this paper, we will explore mathematical algorithms for multifidelity information fusion that use such an approach towards improving the representation of the high-fidelity function with only a few training data points. Given that $f_h$ may not be a simple function -- and sometimes not even a function -- of $f_l$, we demonstrate that using additional functions of $t$, such as derivatives or shifts of $f_l$, can drastically improve the approximation of $f_h$ through Gaussian Processes. We also point out a connection with "embedology" techniques from topology and dynamical systems.