 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZEST: Zero-shot Embodied Skill Transfer for Athletic Robot Control
Jan 30, 2026Achieving robust, human-like whole-body control on humanoid robots for agile, contact-rich behaviors remains a central challenge, demanding heavy per-skill engineering and a brittle process of tuning controllers. We introduce ZEST (Zero-shot Embodied Skill Transfer), a streamlined motion-imitation framework that trains policies via reinforcement learning from diverse sources -- high-fidelity motion capture, noisy monocular video, and non-physics-constrained animation -- and deploys them to hardware zero-shot. ZEST generalizes across behaviors and platforms while avoiding contact labels, reference or observation windows, state estimators, and extensive reward shaping. Its training pipeline combines adaptive sampling, which focuses training on difficult motion segments, and an automatic curriculum using a model-based assistive wrench, together enabling dynamic, long-horizon maneuvers. We further provide a procedure for selecting joint-level gains from approximate analytical armature values for closed-chain actuators, along with a refined model of actuators. Trained entirely in simulation with moderate domain randomization, ZEST demonstrates remarkable generality. On Boston Dynamics' Atlas humanoid, ZEST learns dynamic, multi-contact skills (e.g., army crawl, breakdancing) from motion capture. It transfers expressive dance and scene-interaction skills, such as box-climbing, directly from videos to Atlas and the Unitree G1. Furthermore, it extends across morphologies to the Spot quadruped, enabling acrobatics, such as a continuous backflip, through animation. Together, these results demonstrate robust zero-shot deployment across heterogeneous data sources and embodiments, establishing ZEST as a scalable interface between biological movements and their robotic counterparts.
GRiD: GPU-Accelerated Rigid Body Dynamics with Analytical Gradients
Sep 14, 2021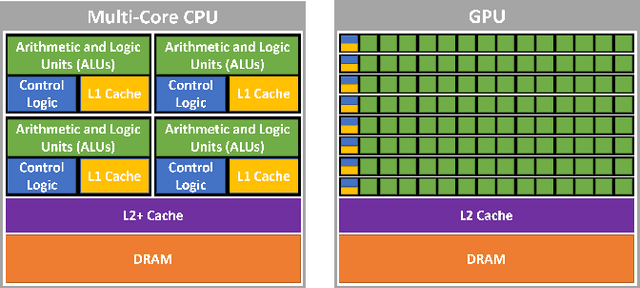
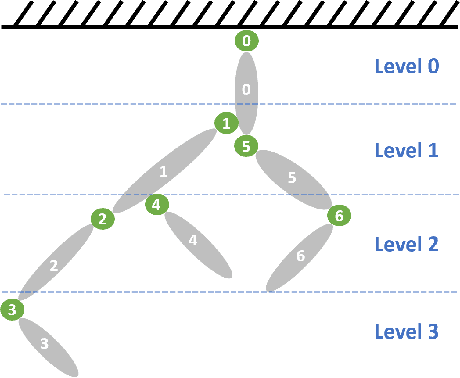
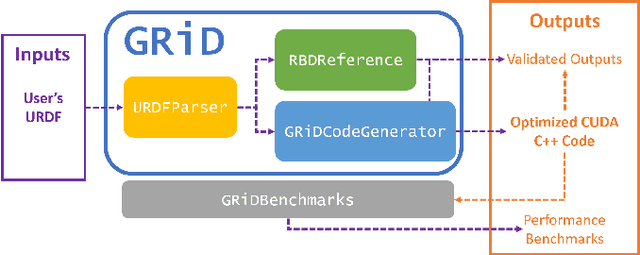
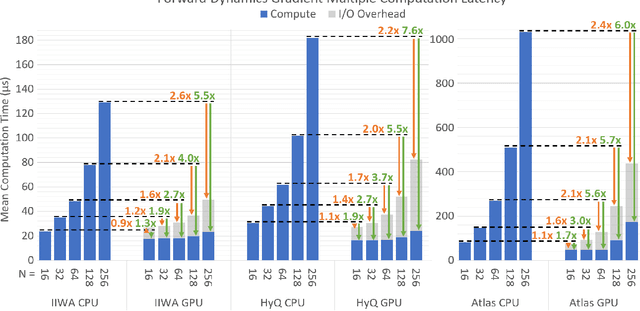
We introduce GRiD: a GPU-accelerated library for computing rigid body dynamics with analytical gradients. GRiD was designed to accelerate the nonlinear trajectory optimization subproblem used in state-of-the-art robotic planning, control, and machine learning. Each iteration of nonlinear trajectory optimization requires tens to hundreds of naturally parallel computations of rigid body dynamics and their gradients. GRiD leverages URDF parsing and code generation to deliver optimized dynamics kernels that not only expose GPU-friendly computational patterns, but also take advantage of both fine-grained parallelism within each computation and coarse-grained parallelism between computations. Through this approach, when performing multiple computations of rigid body dynamics algorithms, GRiD provides as much as a 7.6x speedup over a state-of-the-art, multi-threaded CPU implementation, and maintains as much as a 2.6x speedup when accounting for I/O overhead. We release GRiD as an open-source library, so that it can be leveraged by the robotics community to easily and efficiently accelerate rigid body dynamics on the GPU.
A Comparison of Action Spaces for Learning Manipulation Tasks
Aug 23, 2019



Designing reinforcement learning (RL) problems that can produce delicate and precise manipulation policies requires careful choice of the reward function, state, and action spaces. Much prior work on applying RL to manipulation tasks has defined the action space in terms of direct joint torques or reference positions for a joint-space proportional derivative (PD) controller. In practice, it is often possible to add additional structure by taking advantage of model-based controllers that support both accurate positioning and control of the dynamic response of the manipulator. In this paper, we evaluate how the choice of action space for dynamic manipulation tasks affects the sample complexity as well as the final quality of learned policies. We compare learning performance across three tasks (peg insertion, hammering, and pushing), four action spaces (torque, joint PD, inverse dynamics, and impedance control), and using two modern reinforcement learning algorithms (Proximal Policy Optimization and Soft Actor-Critic). Our results lend support to the hypothesis that learning references for a task-space impedance controller significantly reduces the number of samples needed to achieve good performance across all tasks and algorithms.
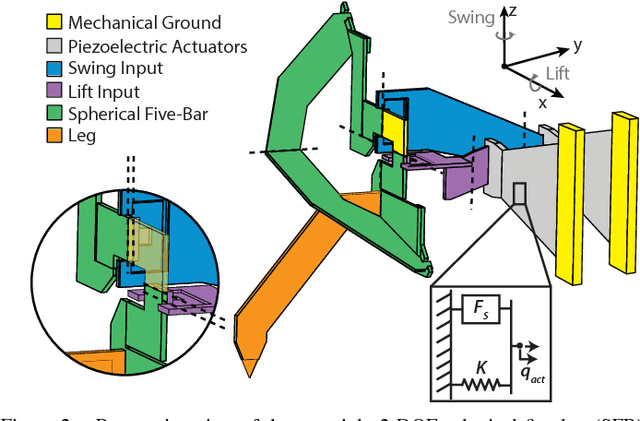
Effective Locomotion at Multiple Stride Frequencies Using Proprioceptive Feedback on a Legged Microrobot
Apr 17, 2019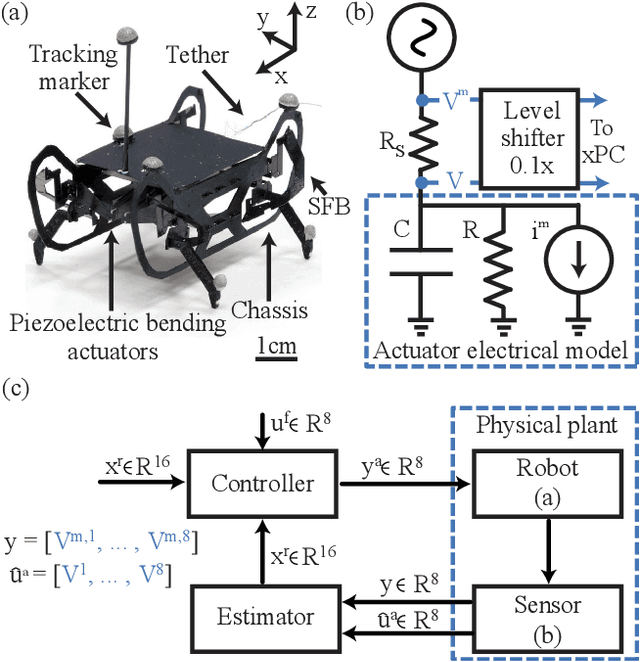
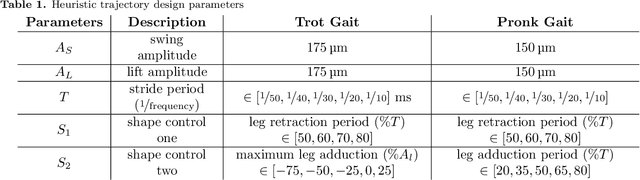
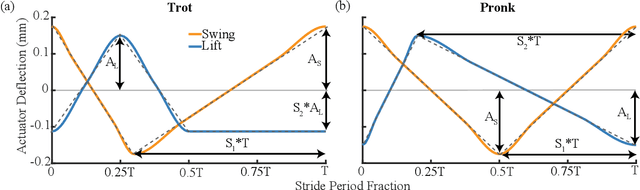
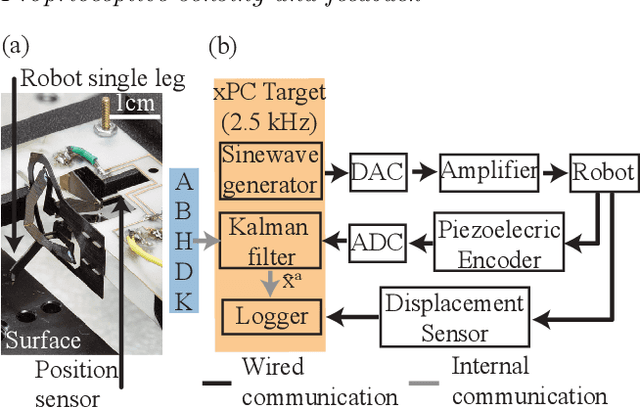
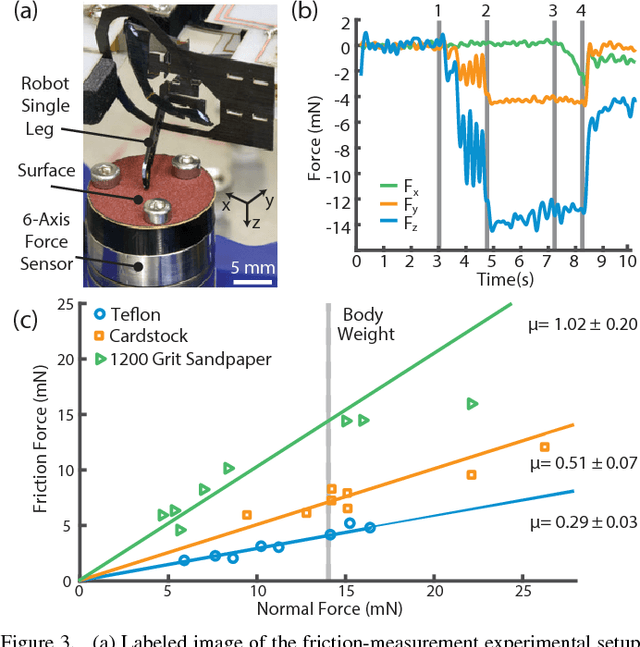
Limitations in actuation, sensing, and computation have forced small legged robots to rely on carefully tuned, mechanically mediated leg trajectories for effective locomotion. Recent advances in manufacturing, however, have enabled the development of small legged robots capable of operation at multiple stride frequencies using multi-degree-of-freedom leg trajectories. Proprioceptive sensing and control is key to extending the capabilities of these robots to a broad range of operating conditions. In this work, we leverage concomitant sensing for piezoelectric actuation to develop a computationally efficient framework for estimation and control of leg trajectories on a quadrupedal microrobot. We demonstrate accurate position estimation ($<$16% root-mean-square error) and control ($<$16% root-mean-square tracking error) during locomotion across a wide range of stride frequencies (10-50 Hz). This capability enables the exploration of two bioinspired parametric leg trajectories designed to reduce leg slip and increase locomotion performance (e.g., speed, cost-of-transport, etc.). Using this approach, we demonstrate high performance locomotion at stride frequencies of (10-30 Hz) where the robot's natural dynamics result in poor open-loop locomotion. Furthermore, we validate the biological hypotheses that inspired the our trajectories and identify regions of highly dynamic locomotion, low cost-of-transport (3.33), and minimal leg slippage (<10%).
Contact-Implicit Optimization of Locomotion Trajectories for a Quadrupedal Microrobot
Jan 25, 2019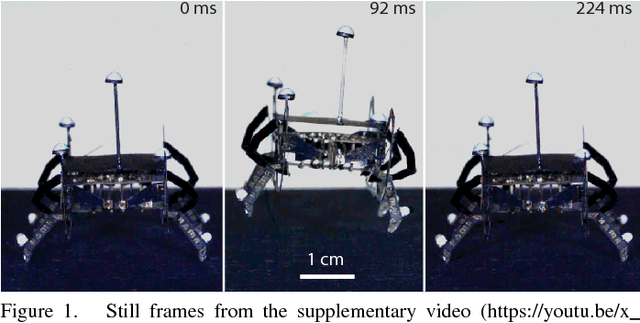
Planning locomotion trajectories for legged microrobots is challenging because of their complex morphology, high frequency passive dynamics, and discontinuous contact interactions with their environment. Consequently, such research is often driven by time-consuming experimental methods. As an alternative, we present a framework for systematically modeling, planning, and controlling legged microrobots. We develop a three-dimensional dynamic model of a 1.5 gram quadrupedal microrobot with complexity (e.g., number of degrees of freedom) similar to larger-scale legged robots. We then adapt a recently developed variational contact-implicit trajectory optimization method to generate feasible whole-body locomotion plans for this microrobot, and we demonstrate that these plans can be tracked with simple joint-space controllers. We plan and execute periodic gaits at multiple stride frequencies and on various surfaces. These gaits achieve high per-cycle velocities, including a maximum of 10.87 mm/cycle, which is 15% faster than previously measured velocities for this microrobot. Furthermore, we plan and execute a vertical jump of 9.96 mm, which is 78% of the microrobot's center-of-mass height. To the best of our knowledge, this is the first end-to-end demonstration of planning and tracking whole-body dynamic locomotion on a millimeter-scale legged microrobot.
An Efficiently Solvable Quadratic Program for Stabilizing Dynamic Locomotion
Feb 18, 2014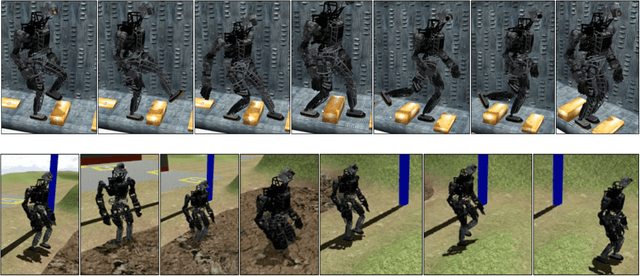
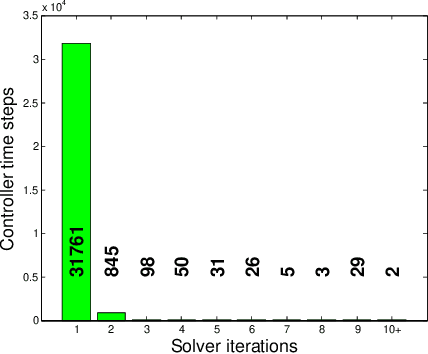
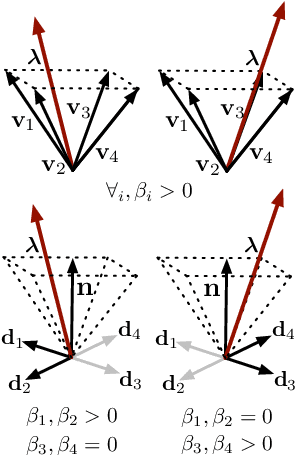
We describe a whole-body dynamic walking controller implemented as a convex quadratic program. The controller solves an optimal control problem using an approximate value function derived from a simple walking model while respecting the dynamic, input, and contact constraints of the full robot dynamics. By exploiting sparsity and temporal structure in the optimization with a custom active-set algorithm, we surpass the performance of the best available off-the-shelf solvers and achieve 1kHz control rates for a 34-DOF humanoid. We describe applications to balancing and walking tasks using the simulated Atlas robot in the DARPA Virtual Robotics Challenge.
* 6 pages, published at ICRA 2014