 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVideo-Based Performance Evaluation for ECR Drills in Synthetic Training Environments
Dec 29, 2025Effective urban warfare training requires situational awareness and muscle memory, developed through repeated practice in realistic yet controlled environments. A key drill, Enter and Clear the Room (ECR), demands threat assessment, coordination, and securing confined spaces. The military uses Synthetic Training Environments that offer scalable, controlled settings for repeated exercises. However, automatic performance assessment remains challenging, particularly when aiming for objective evaluation of cognitive, psychomotor, and teamwork skills. Traditional methods often rely on costly, intrusive sensors or subjective human observation, limiting scalability and accuracy. This paper introduces a video-based assessment pipeline that derives performance analytics from training videos without requiring additional hardware. By utilizing computer vision models, the system extracts 2D skeletons, gaze vectors, and movement trajectories. From these data, we develop task-specific metrics that measure psychomotor fluency, situational awareness, and team coordination. These metrics feed into an extended Cognitive Task Analysis (CTA) hierarchy, which employs a weighted combination to generate overall performance scores for teamwork and cognition. We demonstrate the approach with a case study of real-world ECR drills, providing actionable, domain specific metrics that capture individual and team performance. We also discuss how these insights can support After Action Reviews with interactive dashboards within Gamemaster and the Generalized Intelligent Framework for Tutoring (GIFT), providing intuitive and understandable feedback. We conclude by addressing limitations, including tracking difficulties, ground-truth validation, and the broader applicability of our approach. Future work includes expanding analysis to 3D video data and leveraging video analysis to enable scalable evaluation within STEs.
Contact-Implicit Optimization of Locomotion Trajectories for a Quadrupedal Microrobot
Jan 25, 2019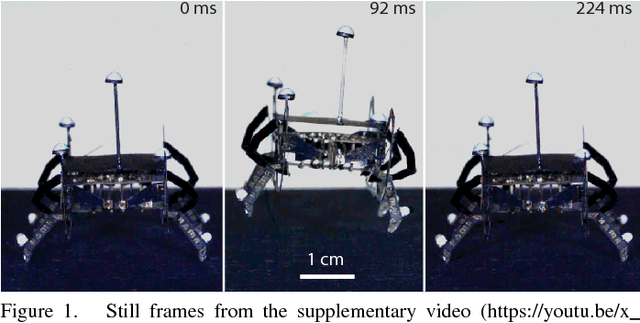
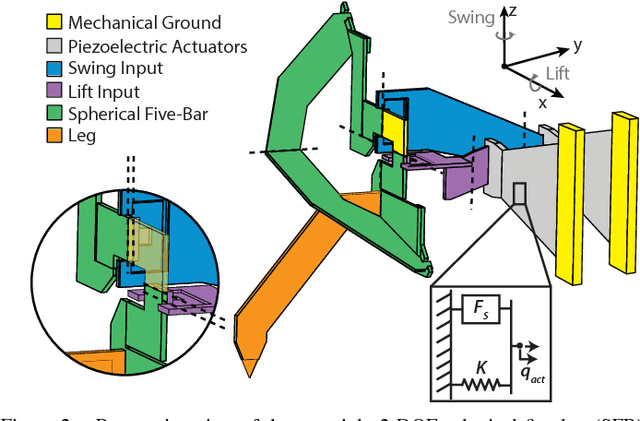
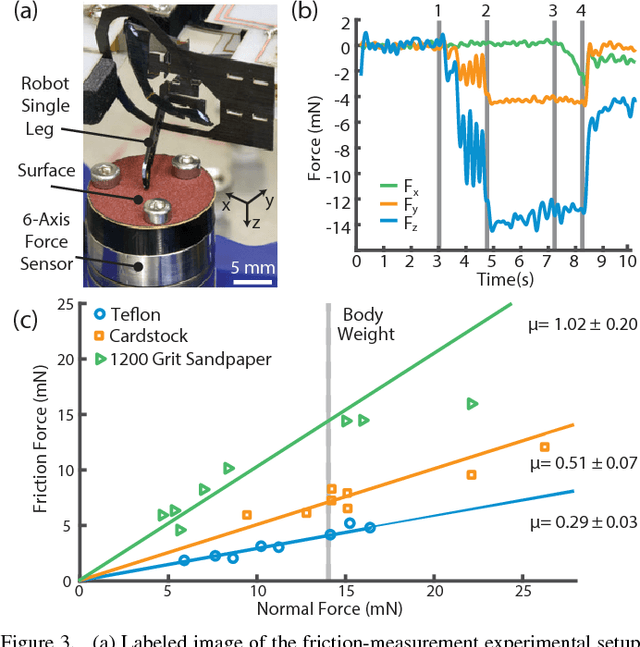
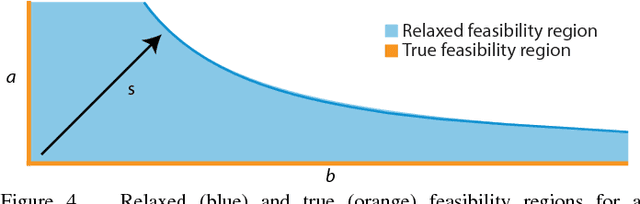
Planning locomotion trajectories for legged microrobots is challenging because of their complex morphology, high frequency passive dynamics, and discontinuous contact interactions with their environment. Consequently, such research is often driven by time-consuming experimental methods. As an alternative, we present a framework for systematically modeling, planning, and controlling legged microrobots. We develop a three-dimensional dynamic model of a 1.5 gram quadrupedal microrobot with complexity (e.g., number of degrees of freedom) similar to larger-scale legged robots. We then adapt a recently developed variational contact-implicit trajectory optimization method to generate feasible whole-body locomotion plans for this microrobot, and we demonstrate that these plans can be tracked with simple joint-space controllers. We plan and execute periodic gaits at multiple stride frequencies and on various surfaces. These gaits achieve high per-cycle velocities, including a maximum of 10.87 mm/cycle, which is 15% faster than previously measured velocities for this microrobot. Furthermore, we plan and execute a vertical jump of 9.96 mm, which is 78% of the microrobot's center-of-mass height. To the best of our knowledge, this is the first end-to-end demonstration of planning and tracking whole-body dynamic locomotion on a millimeter-scale legged microrobot.