 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultilaminate piezoelectric PVDF actuators to enhance performance of soft micro robots
Nov 15, 2025Multilayer piezoelectric polyvinylidene fluoride (PVDF) actuators are a promising approach to enhance performance of soft microrobotic systems. In this work, we develop and characterize multilayer PVDF actuators with parallel voltage distribution across each layer, bridging a unique design space between brittle high-force PZT stacks and compliant but lower-bandwidth soft polymer actuators. We show the effects of layer thickness and number of layers in actuator performance and their agreement with a first principles model. By varying these parameters, we demonstrate actuators capable of >3 mm of free deflection, >20 mN of blocked force, and >=500 Hz, while operating at voltages as low as 150 volts. To illustrate their potential for robotic integration, we integrate our actuators into a planar, translating microrobot that leverages resonance to achieve locomotion with robustness to large perturbations.
Design of a bioinspired robophysical antenna for insect-scale tactile perception and navigation
Jul 31, 2025The American cockroach (Periplaneta americana) uses its soft antennae to guide decision making by extracting rich tactile information from tens of thousands of distributed mechanosensors. Although tactile sensors enable robust, autonomous perception and navigation in natural systems, replicating these capabilities in insect-scale robots remains challenging due to stringent size, weight, and power constraints that limit existing sensor technologies. To overcome these limitations, we introduce CITRAS (Cockroach Inspired Tactile Robotic Antenna Sensor), a bioinspired, multi-segmented, compliant laminate sensor with embedded capacitive angle sensors. CITRAS is compact (73.7x15.6x2.1 mm), lightweight (491 mg), and low-power (32 mW), enabling seamless integration with miniature robotic platforms. The segmented compliant structure passively bends in response to environmental stimuli, achieving accurate hinge angle measurements with maximum errors of just 0.79 degree (quasistatic bending) and 3.58 degree (dynamic bending). Experimental evaluations demonstrate CITRAS' multifunctional tactile perception capabilities: predicting base-to-tip distances with 7.75 % error, estimating environmental gap widths with 6.73 % error, and distinguishing surface textures through differential sensor response. The future integration of this bioinspired tactile antenna in insect-scale robots addresses critical sensing gaps, promising enhanced autonomous exploration, obstacle avoidance, and environmental mapping in complex, confined environments.
Femtosecond laser fabricated nitinol living hinges for millimeter-sized robots
Oct 24, 2023



Nitinol is a smart material that can be used as an actuator, a sensor, or a structural element, and has the potential to significantly enhance the capabilities of microrobots. Femtosecond laser technology can be used to process nitinol while avoiding heat-affected zones (HAZ), thus retaining superelastic properties. In this work, we manufacture living hinges of arbitrary cross-sections from nitinol using a femtosecond laser micromachining process. We first determined the laser cutting parameters, 4.1 Jcm^-2 fluence with 5 passes for 5 um ablation, by varying laser power level and number of passes. Next, we modeled the hinges using an analytical model as well as creating an Abaqus finite element method, and showed the accuracy of the models by comparing them to the torque produced by eight different hinges, four with a rectangular cross-section and four with an arc cross-section. Finally, we manufactured three prototype miniature devices to illustrate the usefulness of these nitinol hinges: a sample spherical 5-bar mechanism, a sarrus linkage, and a piezoelectric actuated robotic wing mechanism.
mCLARI: a shape-morphing insect-scale robot capable of omnidirectional terrain-adaptive locomotion in laterally confined spaces
Oct 06, 2023



Soft compliant microrobots have the potential to deliver significant societal impact when deployed in applications such as search and rescue. In this research we present mCLARI, a body compliant quadrupedal microrobot of 20mm neutral body length and 0.97g, improving on its larger predecessor, CLARI. This robot has four independently actuated leg modules with 2 degrees of freedom, each driven by piezoelectric actuators. The legs are interconnected in a closed kinematic chain via passive body joints, enabling passive body compliance for shape adaptation to external constraints. Despite scaling its larger predecessor down to 60 percent in length and 38 percent in mass, mCLARI maintains 80 percent of the actuation power to achieve high agility. Additionally, we demonstrate the new capability of passively shape-morphing mCLARI - omnidirectional laterally confined locomotion - and experimentally quantify its running performance achieving a new unconstrained top speed of 3 bodylengths/s (60 mms-1). Leveraging passive body compliance, mCLARI can navigate through narrow spaces with a body compression ratio of up to 1.5x the neutral body shape.
Geometric Mechanics of Simultaneous Nonslip Contact in a Planar Quadruped
Aug 28, 2023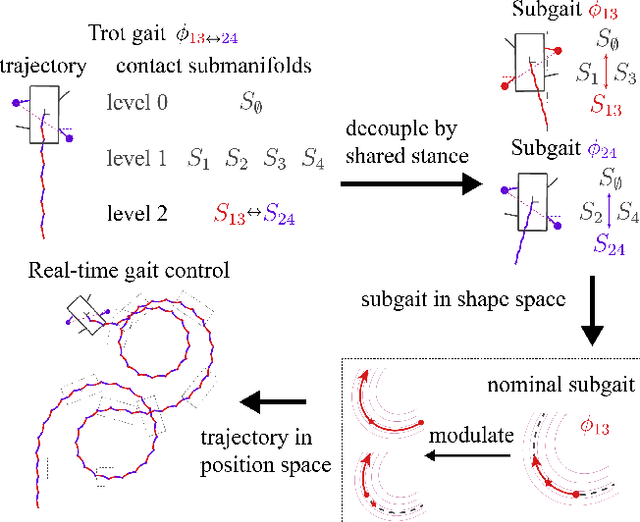
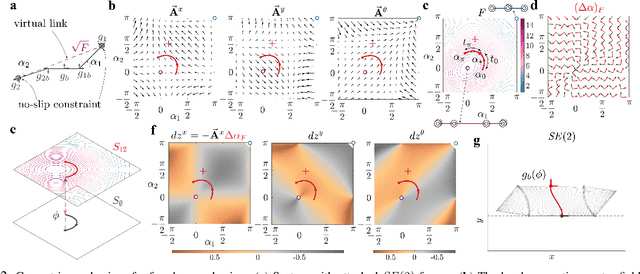
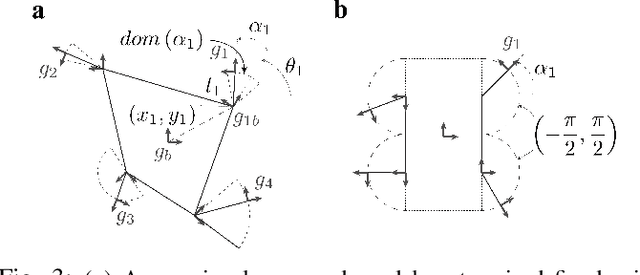
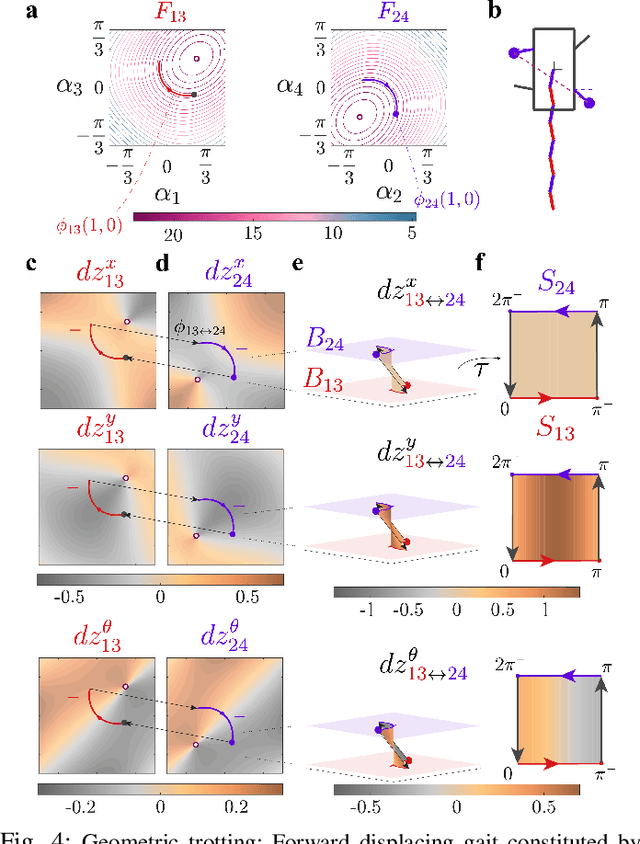
In this paper, we develop a geometric framework for generating non-slip quadrupedal two-beat gaits. We consider a four-bar mechanism as a surrogate model for a contact state and develop the geometric tools such as shape-change basis to aid in gait generation, local connection as the matrix-equation of motion, and stratified panels to model net locomotion in line with previous work\cite{prasad2023contactswitch}. Standard two-beat gaits in quadrupedal systems like trot divide the shape space into two equal, decoupled subspaces. The subgaits generated in each subspace space are designed independently and when combined with appropriate phasing generate a two-beat gait where the displacements add up due to the geometric nature of the system. By adding ``scaling" and ``sliding" control knobs to subgaits defined as flows over the shape-change basis, we continuously steer an arbitrary, planar quadrupedal system. This exhibits translational anisotropy when modulated using the scaling inputs. To characterize the steering induced by sliding inputs, we define an average path curvature function analytically and show that the steering gaits can be generated using a geometric nonslip contact modeling framework.
Design of CLARI: A miniature modular origami passive shape-morphing robot
Jul 19, 2023Miniature robots provide unprecedented access to confined environments and show promising potential for novel applications such as search-and-rescue and high-value asset inspection. The capability of body deformation further enhances the reachability of these small robots in complex cluttered terrains similar to those of insects and soft arthropods. Motivated by this concept, we present CLARI, an insect-scale 2.59g quadrupedal robot capable of body deformation with tethered electrical connections for power and control and manufactured using laminate fabrication and assembled using origami pop-up techniques. In order to enable locomotion in multiple shape configurations, we designed a novel body architecture comprising of modular, actuated leg mechanisms. Overall, CLARI has eight independently actuated degrees of freedom (two per modular leg unit) driven by custom piezoelectric actuators, making it mechanically dextrous. We characterize open-loop robot locomotion at multiple stride frequencies (1-10Hz) using multiple gaits (trot, walk, etc.) in three different fixed body shapes (long, symmetric, wide) and illustrate the robot's capabilities. Finally, we demonstrate preliminary results of CLARI locomoting with a compliant body in open terrain and through a laterally constrained gap, a novel capability for legged robots. Our results represent the first step towards achieving effective cluttered terrain navigation with adaptable compliant robots in real-world environments.
A Population-Level Analysis of Neural Dynamics in Robust Legged Robots
Jun 27, 2023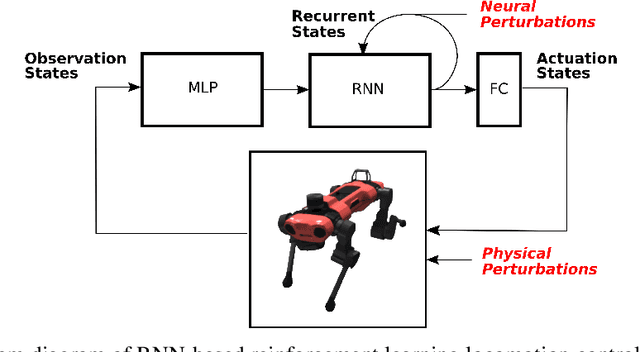
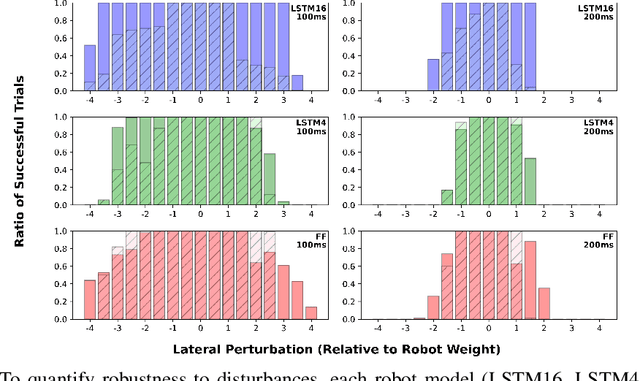
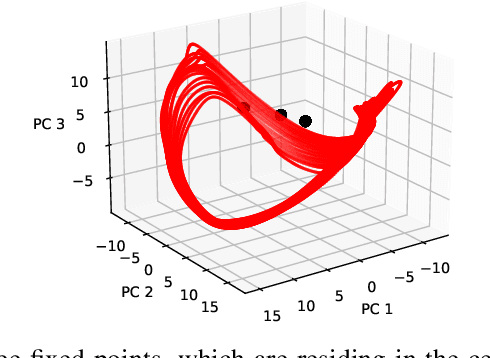
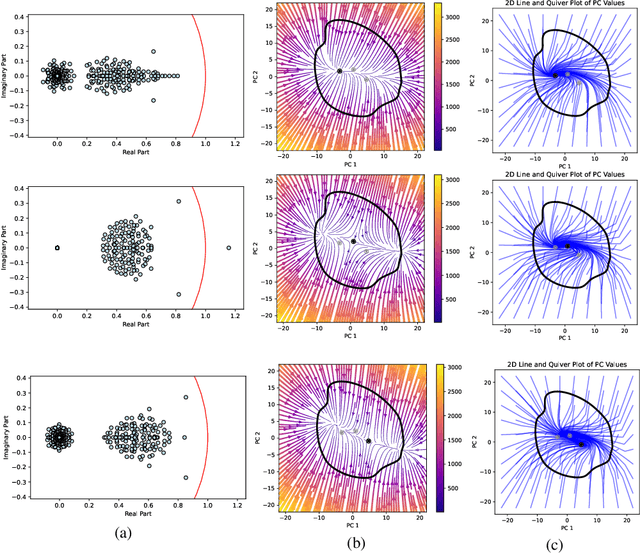
Recurrent neural network-based reinforcement learning systems are capable of complex motor control tasks such as locomotion and manipulation, however, much of their underlying mechanisms still remain difficult to interpret. Our aim is to leverage computational neuroscience methodologies to understanding the population-level activity of robust robot locomotion controllers. Our investigation begins by analyzing topological structure, discovering that fragile controllers have a higher number of fixed points with unstable directions, resulting in poorer balance when instructed to stand in place. Next, we analyze the forced response of the system by applying targeted neural perturbations along directions of dominant population-level activity. We find evidence that recurrent state dynamics are structured and low-dimensional during walking, which aligns with primate studies. Additionally, when recurrent states are perturbed to zero, fragile agents continue to walk, which is indicative of a stronger reliance on sensory input and weaker recurrence.
Geometric Mechanics of Contact-Switching Systems
Jun 17, 2023Discrete and periodic contact switching is a key characteristic of steady state legged locomotion. This paper introduces a framework for modeling and analyzing this contact-switching behavior through the framework of geometric mechanics on a toy robot model that can make continuous limb swings and discrete contact switches. The kinematics of this model forms a hybrid shape space and by extending the generalized Stokes' theorem to compute discrete curvature functions called stratified panels, we determine average locomotion generated by gaits spanning multiple contact modes. Using this tool, we also demonstrate the ability to optimize gaits based on system's locomotion constraints and perform gait reduction on a complex gait spanning multiple contact modes to highlight the scalability to multilegged systems.
From Data-Fitting to Discovery: Interpreting the Neural Dynamics of Motor Control through Reinforcement Learning
May 18, 2023



In motor neuroscience, artificial recurrent neural networks models often complement animal studies. However, most modeling efforts are limited to data-fitting, and the few that examine virtual embodied agents in a reinforcement learning context, do not draw direct comparisons to their biological counterparts. Our study addressing this gap, by uncovering structured neural activity of a virtual robot performing legged locomotion that directly support experimental findings of primate walking and cycling. We find that embodied agents trained to walk exhibit smooth dynamics that avoid tangling -- or opposing neural trajectories in neighboring neural space -- a core principle in computational neuroscience. Specifically, across a wide suite of gaits, the agent displays neural trajectories in the recurrent layers are less tangled than those in the input-driven actuation layers. To better interpret the neural separation of these elliptical-shaped trajectories, we identify speed axes that maximizes variance of mean activity across different forward, lateral, and rotational speed conditions.
Scaling down an insect-size microrobot, HAMR-VI into HAMR-Jr
Mar 06, 2020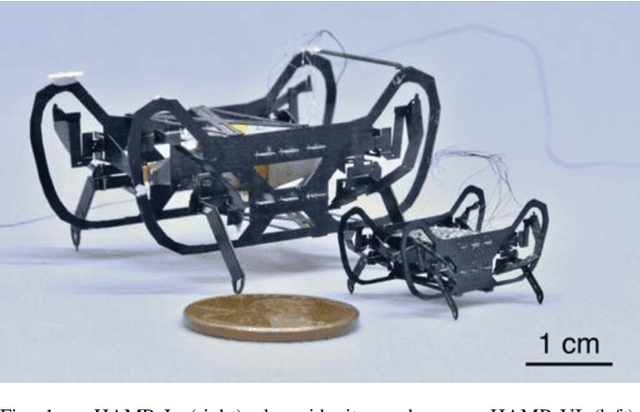
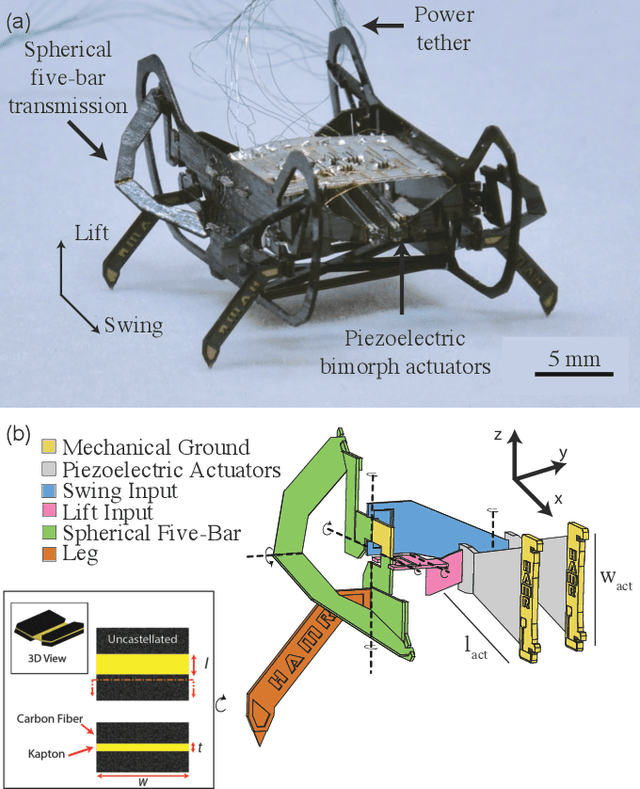
Here we present HAMR-Jr, a \SI{22.5}{\milli\meter}, \SI{320}{\milli\gram} quadrupedal microrobot. With eight independently actuated degrees of freedom, HAMR-Jr is, to our knowledge, the most mechanically dexterous legged robot at its scale and is capable of high-speed locomotion (\SI{13.91}{bodylengths~\second^{-1}}) at a variety of stride frequencies (\SI{1}{}-\SI{200}{\hertz}) using multiple gaits. We achieved this using a design and fabrication process that is flexible, allowing scaling with minimum changes to our workflow. We further characterized HAMR-Jr's open-loop locomotion and compared it with the larger scale HAMR-VI microrobot to demonstrate the effectiveness of scaling laws in predicting running performance.