 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Population-Level Analysis of Neural Dynamics in Robust Legged Robots
Paper and Code
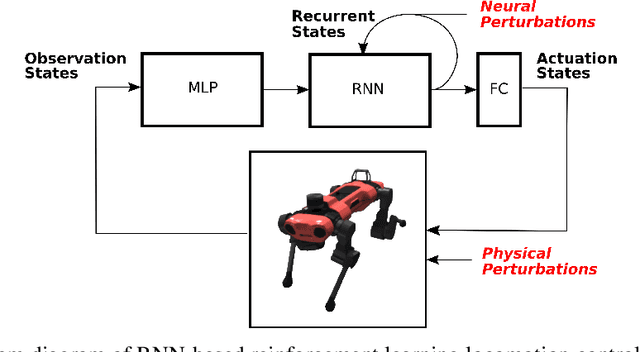
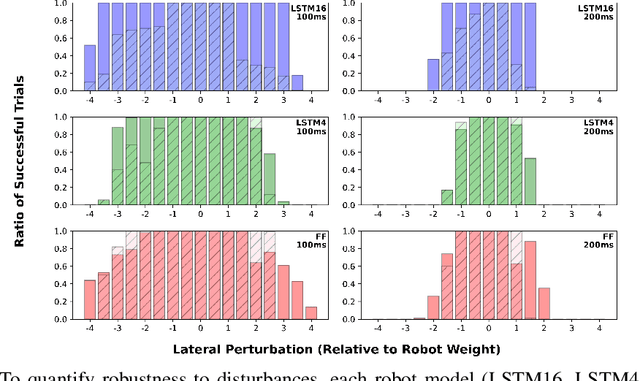
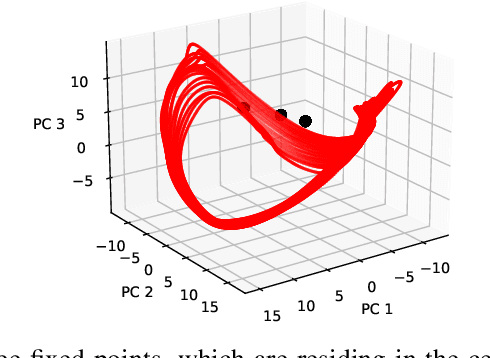
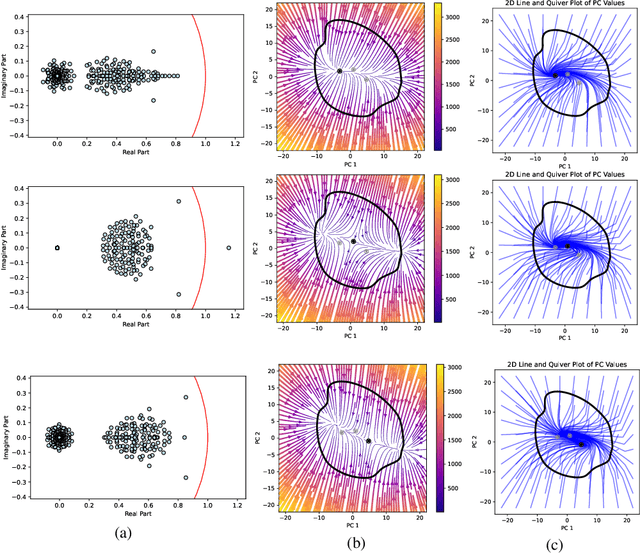
Recurrent neural network-based reinforcement learning systems are capable of complex motor control tasks such as locomotion and manipulation, however, much of their underlying mechanisms still remain difficult to interpret. Our aim is to leverage computational neuroscience methodologies to understanding the population-level activity of robust robot locomotion controllers. Our investigation begins by analyzing topological structure, discovering that fragile controllers have a higher number of fixed points with unstable directions, resulting in poorer balance when instructed to stand in place. Next, we analyze the forced response of the system by applying targeted neural perturbations along directions of dominant population-level activity. We find evidence that recurrent state dynamics are structured and low-dimensional during walking, which aligns with primate studies. Additionally, when recurrent states are perturbed to zero, fragile agents continue to walk, which is indicative of a stronger reliance on sensory input and weaker recurrence.