 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeometric Mechanics of Simultaneous Nonslip Contact in a Planar Quadruped
Aug 28, 2023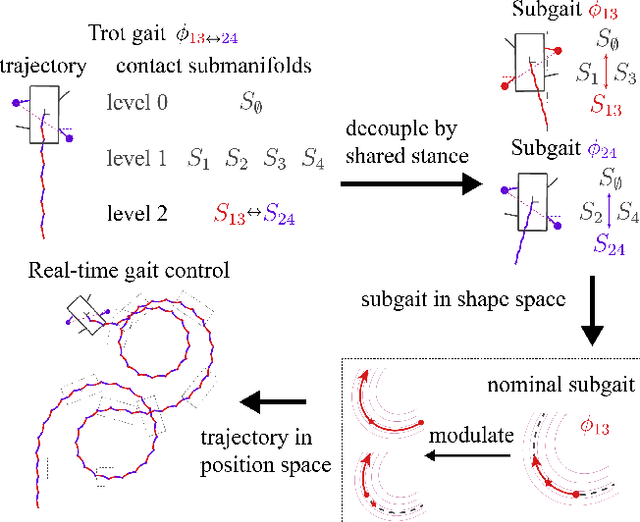
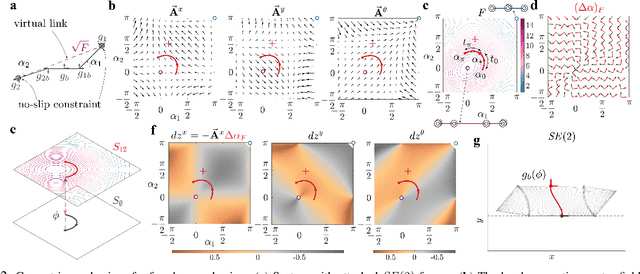
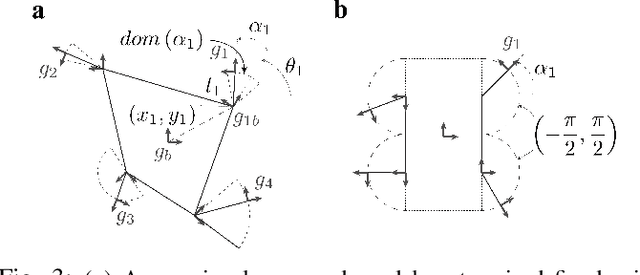
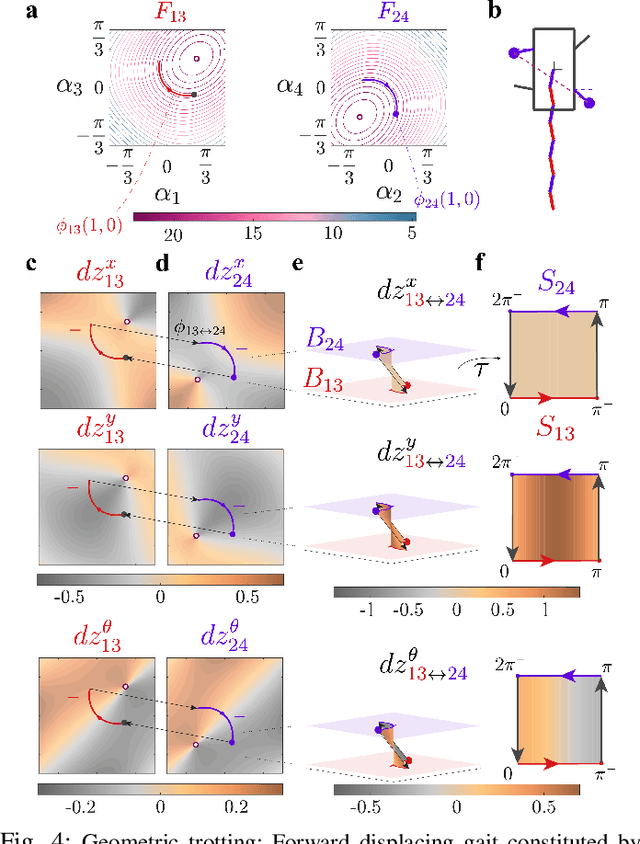
In this paper, we develop a geometric framework for generating non-slip quadrupedal two-beat gaits. We consider a four-bar mechanism as a surrogate model for a contact state and develop the geometric tools such as shape-change basis to aid in gait generation, local connection as the matrix-equation of motion, and stratified panels to model net locomotion in line with previous work\cite{prasad2023contactswitch}. Standard two-beat gaits in quadrupedal systems like trot divide the shape space into two equal, decoupled subspaces. The subgaits generated in each subspace space are designed independently and when combined with appropriate phasing generate a two-beat gait where the displacements add up due to the geometric nature of the system. By adding ``scaling" and ``sliding" control knobs to subgaits defined as flows over the shape-change basis, we continuously steer an arbitrary, planar quadrupedal system. This exhibits translational anisotropy when modulated using the scaling inputs. To characterize the steering induced by sliding inputs, we define an average path curvature function analytically and show that the steering gaits can be generated using a geometric nonslip contact modeling framework.
Geometric Mechanics of Contact-Switching Systems
Jun 17, 2023Discrete and periodic contact switching is a key characteristic of steady state legged locomotion. This paper introduces a framework for modeling and analyzing this contact-switching behavior through the framework of geometric mechanics on a toy robot model that can make continuous limb swings and discrete contact switches. The kinematics of this model forms a hybrid shape space and by extending the generalized Stokes' theorem to compute discrete curvature functions called stratified panels, we determine average locomotion generated by gaits spanning multiple contact modes. Using this tool, we also demonstrate the ability to optimize gaits based on system's locomotion constraints and perform gait reduction on a complex gait spanning multiple contact modes to highlight the scalability to multilegged systems.