 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEPS3D: End-to-End Feed-Forward 3D Panoptic Segmentation
Jun 08, 2026This paper introduces EPS3D, a new end-to-end feed-forward framework for open-vocabulary 3D panoptic segmentation. Unlike existing methods relying on additional preprocessing, we design an end-to-end architecture, with a distillation-based training strategy on diverse 3D scenes to predict 3D-aware semantic and instance features from multi-view images, improving 3D consistency and avoiding error accumulation. We further propose a mutual enhancement module to enforce inherent semantic-instance consistency. By aligning semantics within instances (Ins2Sem) and refining instance features with semantic guidance (Sem2Ins), we achieve more coherent 3D scene understanding. Ultimately, EPS3D outperforms SOTA baselines on two benchmarks (e.g., +13% mIoU for semantics on Replica) with high efficiency (e.g., 1s per scene), supporting tasks like robotic manipulation and 3D scene editing.
Rethinking End-to-End 2D to 3D Scene Segmentation in Gaussian Splatting
Mar 18, 2025Lifting multi-view 2D instance segmentation to a radiance field has proven to be effective to enhance 3D understanding. Existing methods rely on direct matching for end-to-end lifting, yielding inferior results; or employ a two-stage solution constrained by complex pre- or post-processing. In this work, we design a new end-to-end object-aware lifting approach, named Unified-Lift that provides accurate 3D segmentation based on the 3D Gaussian representation. To start, we augment each Gaussian point with an additional Gaussian-level feature learned using a contrastive loss to encode instance information. Importantly, we introduce a learnable object-level codebook to account for individual objects in the scene for an explicit object-level understanding and associate the encoded object-level features with the Gaussian-level point features for segmentation predictions. While promising, achieving effective codebook learning is non-trivial and a naive solution leads to degraded performance. Therefore, we formulate the association learning module and the noisy label filtering module for effective and robust codebook learning. We conduct experiments on three benchmarks: LERF-Masked, Replica, and Messy Rooms datasets. Both qualitative and quantitative results manifest that our Unified-Lift clearly outperforms existing methods in terms of segmentation quality and time efficiency. The code is publicly available at \href{https://github.com/Runsong123/Unified-Lift}{https://github.com/Runsong123/Unified-Lift}.
PCF-Lift: Panoptic Lifting by Probabilistic Contrastive Fusion
Oct 14, 2024Panoptic lifting is an effective technique to address the 3D panoptic segmentation task by unprojecting 2D panoptic segmentations from multi-views to 3D scene. However, the quality of its results largely depends on the 2D segmentations, which could be noisy and error-prone, so its performance often drops significantly for complex scenes. In this work, we design a new pipeline coined PCF-Lift based on our Probabilis-tic Contrastive Fusion (PCF) to learn and embed probabilistic features throughout our pipeline to actively consider inaccurate segmentations and inconsistent instance IDs. Technical-wise, we first model the probabilistic feature embeddings through multivariate Gaussian distributions. To fuse the probabilistic features, we incorporate the probability product kernel into the contrastive loss formulation and design a cross-view constraint to enhance the feature consistency across different views. For the inference, we introduce a new probabilistic clustering method to effectively associate prototype features with the underlying 3D object instances for the generation of consistent panoptic segmentation results. Further, we provide a theoretical analysis to justify the superiority of the proposed probabilistic solution. By conducting extensive experiments, our PCF-lift not only significantly outperforms the state-of-the-art methods on widely used benchmarks including the ScanNet dataset and the challenging Messy Room dataset (4.4% improvement of scene-level PQ), but also demonstrates strong robustness when incorporating various 2D segmentation models or different levels of hand-crafted noise.
Semi-signed neural fitting for surface reconstruction from unoriented point clouds
Jun 14, 2022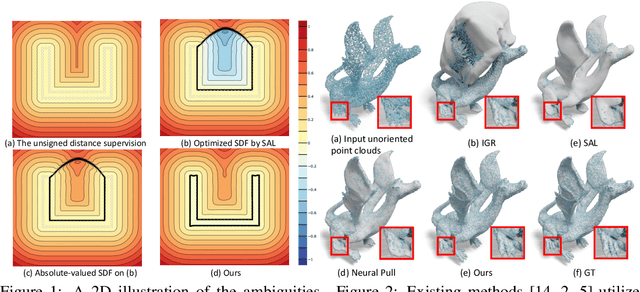
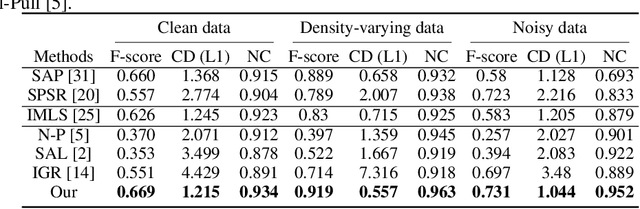
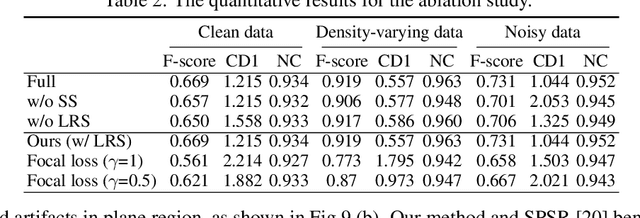
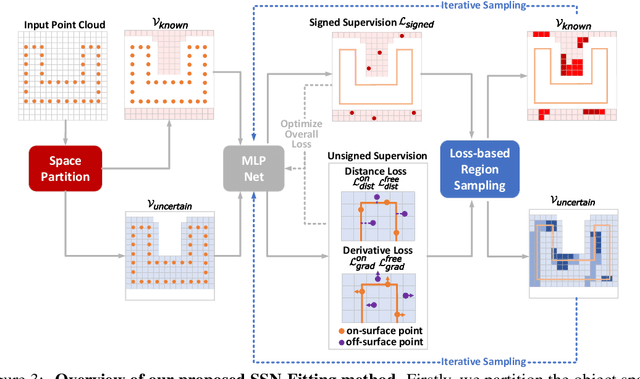
Reconstructing 3D geometry from \emph{unoriented} point clouds can benefit many downstream tasks. Recent methods mostly adopt a neural shape representation with a neural network to represent a signed distance field and fit the point cloud with an unsigned supervision. However, we observe that using unsigned supervision may cause severe ambiguities and often leads to \emph{unexpected} failures such as generating undesired surfaces in free space when reconstructing complex structures and struggle with reconstructing accurate surfaces. To reconstruct a better signed distance field, we propose semi-signed neural fitting (SSN-Fitting), which consists of a semi-signed supervision and a loss-based region sampling strategy. Our key insight is that signed supervision is more informative and regions that are obviously outside the object can be easily determined. Meanwhile, a novel importance sampling is proposed to accelerate the optimization and better reconstruct the fine details. Specifically, we voxelize and partition the object space into \emph{sign-known} and \emph{sign-uncertain} regions, in which different supervisions are applied. Also, we adaptively adjust the sampling rate of each voxel according to the tracked reconstruction loss, so that the network can focus more on the complex under-fitting regions. We conduct extensive experiments to demonstrate that SSN-Fitting achieves state-of-the-art performance under different settings on multiple datasets, including clean, density-varying, and noisy data.
AdaFit: Rethinking Learning-based Normal Estimation on Point Clouds
Aug 12, 2021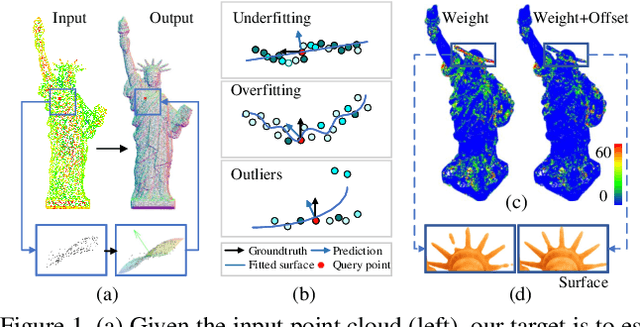
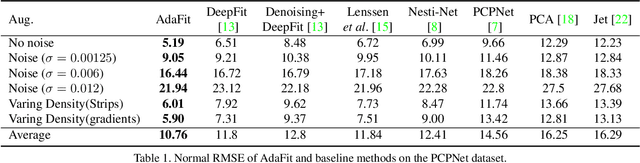
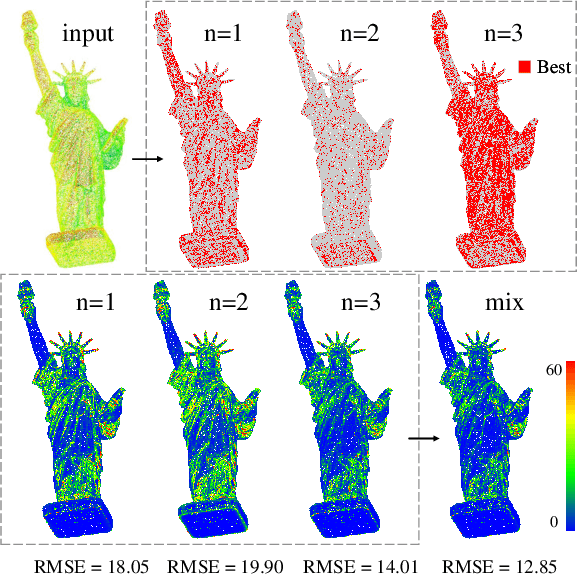
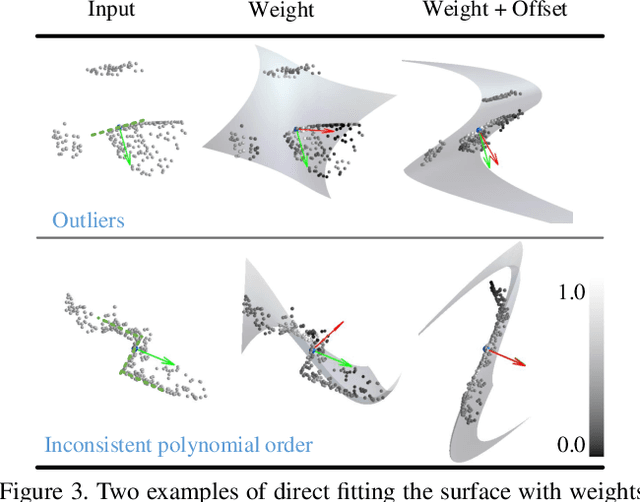
This paper presents a neural network for robust normal estimation on point clouds, named AdaFit, that can deal with point clouds with noise and density variations. Existing works use a network to learn point-wise weights for weighted least squares surface fitting to estimate the normals, which has difficulty in finding accurate normals in complex regions or containing noisy points. By analyzing the step of weighted least squares surface fitting, we find that it is hard to determine the polynomial order of the fitting surface and the fitting surface is sensitive to outliers. To address these problems, we propose a simple yet effective solution that adds an additional offset prediction to improve the quality of normal estimation. Furthermore, in order to take advantage of points from different neighborhood sizes, a novel Cascaded Scale Aggregation layer is proposed to help the network predict more accurate point-wise offsets and weights. Extensive experiments demonstrate that AdaFit achieves state-of-the-art performance on both the synthetic PCPNet dataset and the real-word SceneNN dataset.