 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLocatability-Guided Adaptive Reasoning for Image Geo-Localization with Vision-Language Models
Mar 13, 2026The emergence of Vision-Language Models (VLMs) has introduced new paradigms for global image geo-localization through retrieval-augmented generation (RAG) and reasoning-driven inference. However, RAG methods are constrained by retrieval database quality, while reasoning-driven approaches fail to internalize image locatability, relying on inefficient, fixed-depth reasoning paths that increase hallucinations and degrade accuracy. To overcome these limitations, we introduce an Optimized Locatability Score that quantifies an image's suitability for deep reasoning in geo-localization. Using this metric, we curate Geo-ADAPT-51K, a locatability-stratified reasoning dataset enriched with augmented reasoning trajectories for complex visual scenes. Building on this foundation, we propose a two-stage Group Relative Policy Optimization (GRPO) curriculum with customized reward functions that regulate adaptive reasoning depth, visual grounding, and hierarchical geographical accuracy. Our framework, Geo-ADAPT, learns an adaptive reasoning policy, achieves state-of-the-art performance across multiple geo-localization benchmarks, and substantially reduces hallucinations by reasoning both adaptively and efficiently.
TransitReID: Transit OD Data Collection with Occlusion-Resistant Dynamic Passenger Re-Identification
Apr 15, 2025



Transit Origin-Destination (OD) data are essential for transit planning, particularly in route optimization and demand-responsive paratransit systems. Traditional methods, such as manual surveys, are costly and inefficient, while Bluetooth and WiFi-based approaches require passengers to carry specific devices, limiting data coverage. On the other hand, most transit vehicles are equipped with onboard cameras for surveillance, offering an opportunity to repurpose them for edge-based OD data collection through visual person re-identification (ReID). However, such approaches face significant challenges, including severe occlusion and viewpoint variations in transit environments, which greatly reduce matching accuracy and hinder their adoption. Moreover, designing effective algorithms that can operate efficiently on edge devices remains an open challenge. To address these challenges, we propose TransitReID, a novel framework for individual-level transit OD data collection. TransitReID consists of two key components: (1) An occlusion-robust ReID algorithm featuring a variational autoencoder guided region-attention mechanism that adaptively focuses on visible body regions through reconstruction loss-optimized weight allocation; and (2) a Hierarchical Storage and Dynamic Matching (HSDM) mechanism specifically designed for efficient and robust transit OD matching which balances storage, speed, and accuracy. Additionally, a multi-threaded design supports near real-time operation on edge devices, which also ensuring privacy protection. We also introduce a ReID dataset tailored for complex bus environments to address the lack of relevant training data. Experimental results demonstrate that TransitReID achieves state-of-the-art performance in ReID tasks, with an accuracy of approximately 90\% in bus route simulations.
Enhancing Disaster Resilience with UAV-Assisted Edge Computing: A Reinforcement Learning Approach to Managing Heterogeneous Edge Devices
Jan 25, 2025Edge sensing and computing is rapidly becoming part of intelligent infrastructure architecture leading to operational reliance on such systems in disaster or emergency situations. In such scenarios there is a high chance of power supply failure due to power grid issues, and communication system issues due to base stations losing power or being damaged by the elements, e.g., flooding, wildfires etc. Mobile edge computing in the form of unmanned aerial vehicles (UAVs) has been proposed to provide computation offloading from these devices to conserve their battery, while the use of UAVs as relay network nodes has also been investigated previously. This paper considers the use of UAVs with further constraints on power and connectivity to prolong the life of the network while also ensuring that the data is received from the edge nodes in a timely manner. Reinforcement learning is used to investigate numerous scenarios of various levels of power and communication failure. This approach is able to identify the device most likely to fail in a given scenario, thus providing priority guidance for maintenance personnel. The evacuations of a rural town and urban downtown area are also simulated to demonstrate the effectiveness of the approach at extending the life of the most critical edge devices.
Traffic Co-Simulation Framework Empowered by Infrastructure Camera Sensing and Reinforcement Learning
Dec 05, 2024Traffic simulations are commonly used to optimize traffic flow, with reinforcement learning (RL) showing promising potential for automated traffic signal control. Multi-agent reinforcement learning (MARL) is particularly effective for learning control strategies for traffic lights in a network using iterative simulations. However, existing methods often assume perfect vehicle detection, which overlooks real-world limitations related to infrastructure availability and sensor reliability. This study proposes a co-simulation framework integrating CARLA and SUMO, which combines high-fidelity 3D modeling with large-scale traffic flow simulation. Cameras mounted on traffic light poles within the CARLA environment use a YOLO-based computer vision system to detect and count vehicles, providing real-time traffic data as input for adaptive signal control in SUMO. MARL agents, trained with four different reward structures, leverage this visual feedback to optimize signal timings and improve network-wide traffic flow. Experiments in the test-bed demonstrate the effectiveness of the proposed MARL approach in enhancing traffic conditions using real-time camera-based detection. The framework also evaluates the robustness of MARL under faulty or sparse sensing and compares the performance of YOLOv5 and YOLOv8 for vehicle detection. Results show that while better accuracy improves performance, MARL agents can still achieve significant improvements with imperfect detection, demonstrating adaptability for real-world scenarios.
Deep Learning based Computer Vision Methods for Complex Traffic Environments Perception: A Review
Nov 09, 2022Computer vision applications in intelligent transportation systems (ITS) and autonomous driving (AD) have gravitated towards deep neural network architectures in recent years. While performance seems to be improving on benchmark datasets, many real-world challenges are yet to be adequately considered in research. This paper conducted an extensive literature review on the applications of computer vision in ITS and AD, and discusses challenges related to data, models, and complex urban environments. The data challenges are associated with the collection and labeling of training data and its relevance to real world conditions, bias inherent in datasets, the high volume of data needed to be processed, and privacy concerns. Deep learning (DL) models are commonly too complex for real-time processing on embedded hardware, lack explainability and generalizability, and are hard to test in real-world settings. Complex urban traffic environments have irregular lighting and occlusions, and surveillance cameras can be mounted at a variety of angles, gather dirt, shake in the wind, while the traffic conditions are highly heterogeneous, with violation of rules and complex interactions in crowded scenarios. Some representative applications that suffer from these problems are traffic flow estimation, congestion detection, autonomous driving perception, vehicle interaction, and edge computing for practical deployment. The possible ways of dealing with the challenges are also explored while prioritizing practical deployment.
IoT System for Real-Time Near-Crash Detection for Automated Vehicle Testing
Aug 02, 2020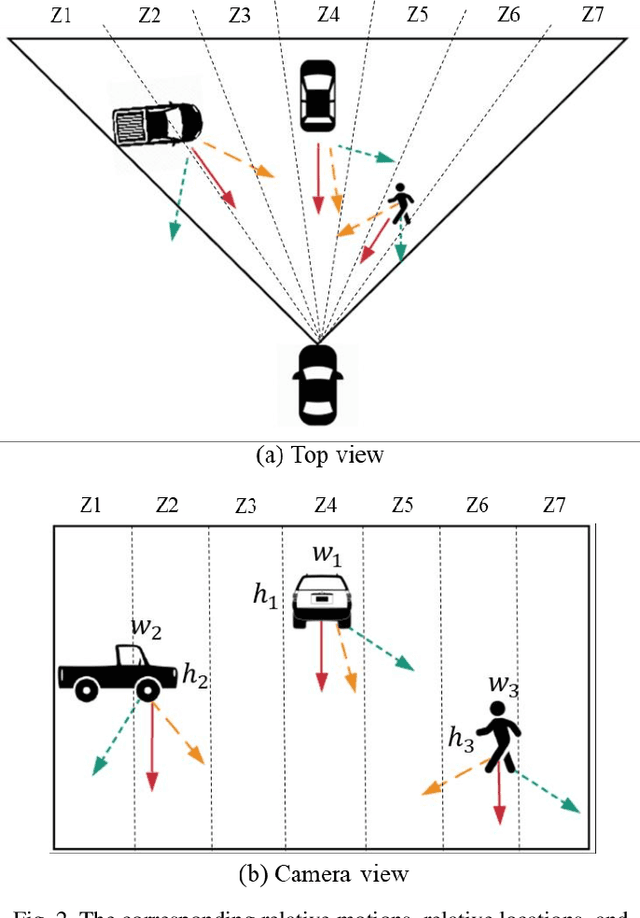
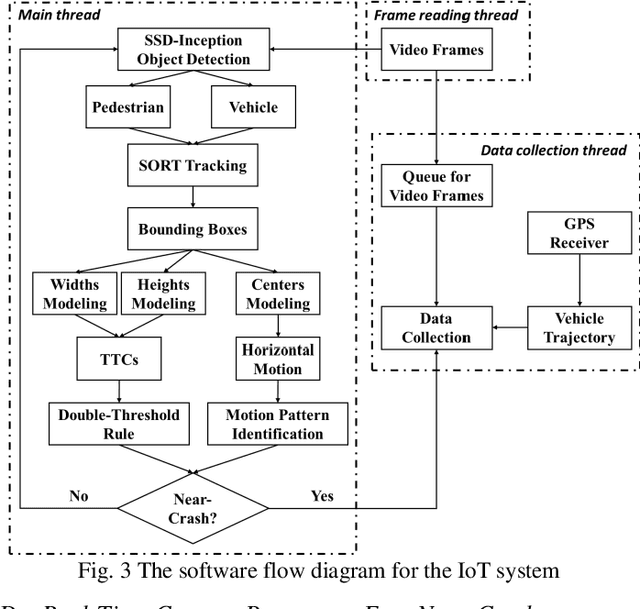

Our world is moving towards the goal of fully autonomous driving at a fast pace. While the latest automated vehicles (AVs) can handle most real-world scenarios they encounter, a major bottleneck for turning fully autonomous driving into reality is the lack of sufficient corner case data for training and testing AVs. Near-crash data, as a widely used surrogate data for traffic safety research, can also serve the purpose of AV testing if properly collected. To this end, this paper proposes an Internet-of-Things (IoT) system for real-time near-crash data collection. The system has several cool features. First, it is a low-cost and standalone system that is backward-compatible with any existing vehicles. People can fix the system to their dashboards for near-crash data collection and collision warning without the approval or help of vehicle manufacturers. Second, we propose a new near-crash detection method that models the target's size changes and relative motions with the bounding boxes generated by deep-learning-based object detection and tracking. This near-crash detection method is fast, accurate, and reliable; particularly, it is insensitive to camera parameters, thereby having an excellent transferability to different dashboard cameras. We have conducted comprehensive experiments with 100 videos locally processed at Jetson, as well as real-world tests on cars and buses. Besides collecting corner cases, it can also serve as a white-box platform for testing innovative algorithms and evaluating other AV products. The system contributes to the real-world testing of AVs and has great potential to be brought into large-scale deployment.
Stacked Bidirectional and Unidirectional LSTM Recurrent Neural Network for Forecasting Network-wide Traffic State with Missing Values
May 24, 2020



Short-term traffic forecasting based on deep learning methods, especially recurrent neural networks (RNN), has received much attention in recent years. However, the potential of RNN-based models in traffic forecasting has not yet been fully exploited in terms of the predictive power of spatial-temporal data and the capability of handling missing data. In this paper, we focus on RNN-based models and attempt to reformulate the way to incorporate RNN and its variants into traffic prediction models. A stacked bidirectional and unidirectional LSTM network architecture (SBU-LSTM) is proposed to assist the design of neural network structures for traffic state forecasting. As a key component of the architecture, the bidirectional LSTM (BDLSM) is exploited to capture the forward and backward temporal dependencies in spatiotemporal data. To deal with missing values in spatial-temporal data, we also propose a data imputation mechanism in the LSTM structure (LSTM-I) by designing an imputation unit to infer missing values and assist traffic prediction. The bidirectional version of LSTM-I is incorporated in the SBU-LSTM architecture. Two real-world network-wide traffic state datasets are used to conduct experiments and published to facilitate further traffic prediction research. The prediction performance of multiple types of multi-layer LSTM or BDLSTM models is evaluated. Experimental results indicate that the proposed SBU-LSTM architecture, especially the two-layer BDLSTM network, can achieve superior performance for the network-wide traffic prediction in both accuracy and robustness. Further, comprehensive comparison results show that the proposed data imputation mechanism in the RNN-based models can achieve outstanding prediction performance when the model's input data contains different patterns of missing values.
Two-Stream Multi-Channel Convolutional Neural Network (TM-CNN) for Multi-Lane Traffic Speed Prediction Considering Traffic Volume Impact
Mar 05, 2019
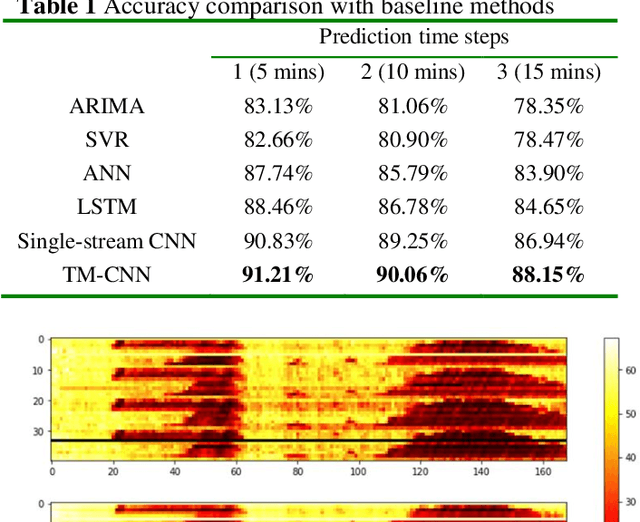
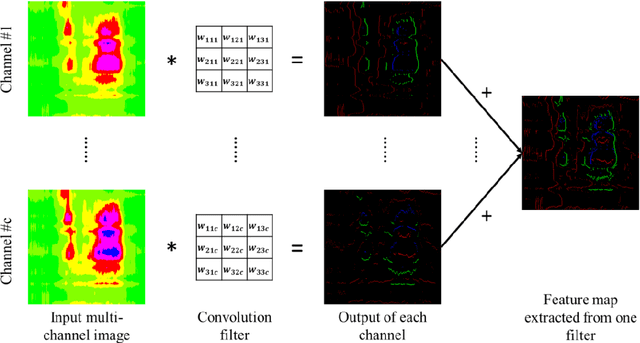
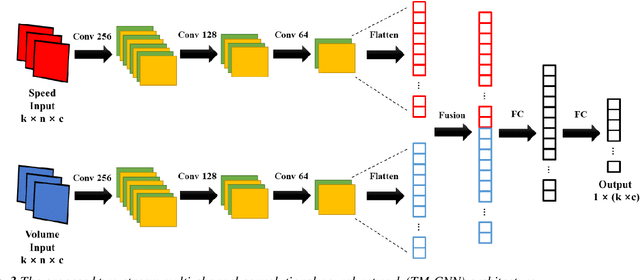
Traffic speed prediction is a critically important component of intelligent transportation systems (ITS). Recently, with the rapid development of deep learning and transportation data science, a growing body of new traffic speed prediction models have been designed, which achieved high accuracy and large-scale prediction. However, existing studies have two major limitations. First, they predict aggregated traffic speed rather than lane-level traffic speed; second, most studies ignore the impact of other traffic flow parameters in speed prediction. To address these issues, we propose a two-stream multi-channel convolutional neural network (TM-CNN) model for multi-lane traffic speed prediction considering traffic volume impact. In this model, we first introduce a new data conversion method that converts raw traffic speed data and volume data into spatial-temporal multi-channel matrices. Then we carefully design a two-stream deep neural network to effectively learn the features and correlations between individual lanes, in the spatial-temporal dimensions, and between speed and volume. Accordingly, a new loss function that considers the volume impact in speed prediction is developed. A case study using one-year data validates the TM-CNN model and demonstrates its superiority. This paper contributes to two research areas: (1) traffic speed prediction, and (2) multi-lane traffic flow study.
Safe, Efficient, and Comfortable Velocity Control based on Reinforcement Learning for Autonomous Driving
Jan 29, 2019
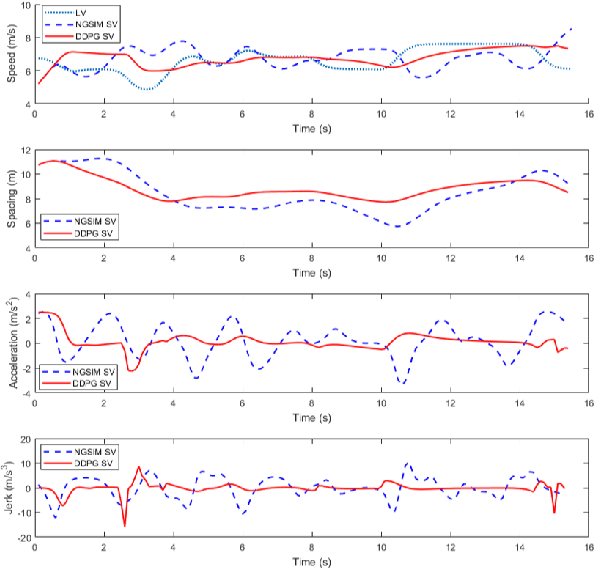
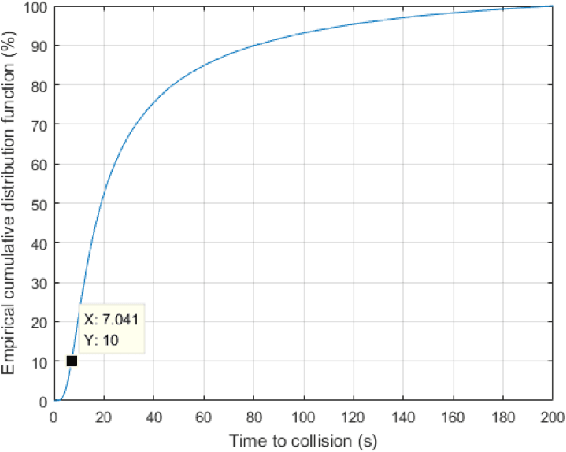
A model used for velocity control during car following was proposed based on deep reinforcement learning (RL). To fulfil the multi-objectives of car following, a reward function reflecting driving safety, efficiency, and comfort was constructed. With the reward function, the RL agent learns to control vehicle speed in a fashion that maximizes cumulative rewards, through trials and errors in the simulation environment. A total of 1,341 car-following events extracted from the Next Generation Simulation (NGSIM) dataset were used to train the model. Car-following behavior produced by the model were compared with that observed in the empirical NGSIM data, to demonstrate the model's ability to follow a lead vehicle safely, efficiently, and comfortably. Results show that the model demonstrates the capability of safe, efficient, and comfortable velocity control in that it 1) has small percentages (8\%) of dangerous minimum time to collision values (\textless\ 5s) than human drivers in the NGSIM data (35\%); 2) can maintain efficient and safe headways in the range of 1s to 2s; and 3) can follow the lead vehicle comfortably with smooth acceleration. The results indicate that reinforcement learning methods could contribute to the development of autonomous driving systems.
High-Order Graph Convolutional Recurrent Neural Network: A Deep Learning Framework for Network-Scale Traffic Learning and Forecasting
Feb 20, 2018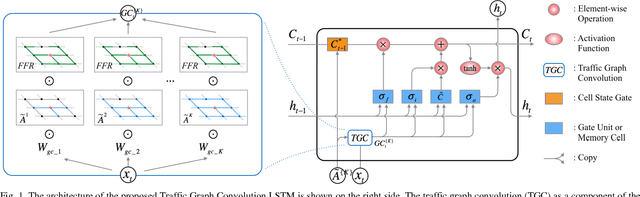
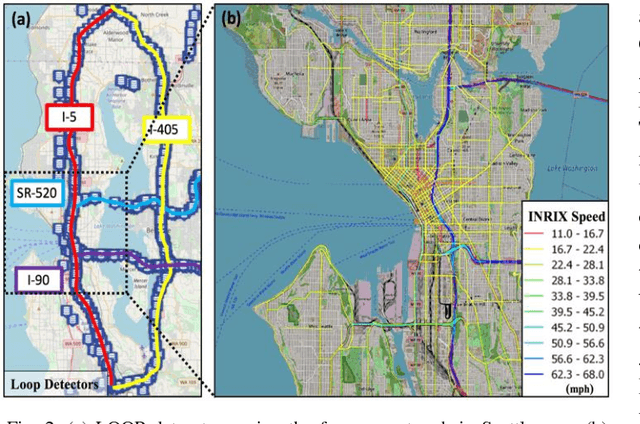
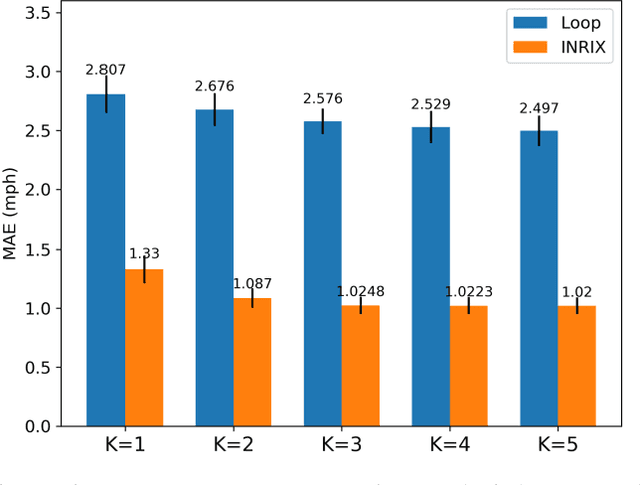
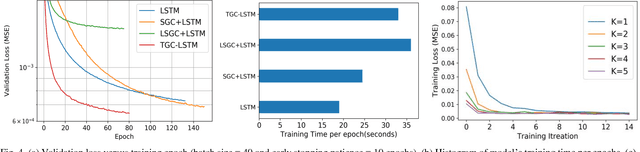
Traffic forecasting is a challenging task, due to the complicated spatial dependencies on roadway networks and the time-varying traffic patterns. To address this challenge, we learn the traffic network as a graph and propose a novel deep learning framework, High-Order Graph Convolutional Long Short-Term Memory Neural Network (HGC-LSTM), to learn the interactions between links in the traffic network and forecast the network-wide traffic state. We define the high-order traffic graph convolution based on the physical network topology. The proposed framework employs L1-norms on the graph convolution weights and L2-norms on the graph convolution features to identify the most influential links in the traffic network. We propose a novel Real-Time Branching Learning (RTBL) algorithm for the HGC-LSTM framework to accelerate the training process for spatio-temporal data. Experiments show that our HGC-LSTM network is able to capture the complex spatio-temporal dependencies efficiently present in the traffic network and consistently outperforms state-of-the-art baseline methods on two heterogeneous real-world traffic datasets. The visualization of graph convolution weights shows that the proposed framework can accurately recognize the most influential roadway segments in real-world traffic networks.