 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGated Relational Alignment via Confidence-based Distillation for Efficient VLMs
Jan 30, 2026Vision-Language Models (VLMs) achieve strong multimodal performance but are costly to deploy, and post-training quantization often causes significant accuracy loss. Despite its potential, quantization-aware training for VLMs remains underexplored. We propose GRACE, a framework unifying knowledge distillation and QAT under the Information Bottleneck principle: quantization constrains information capacity while distillation guides what to preserve within this budget. Treating the teacher as a proxy for task-relevant information, we introduce confidence-gated decoupled distillation to filter unreliable supervision, relational centered kernel alignment to transfer visual token structures, and an adaptive controller via Lagrangian relaxation to balance fidelity against capacity constraints. Across extensive benchmarks on LLaVA and Qwen families, our INT4 models consistently outperform FP16 baselines (e.g., LLaVA-1.5-7B: 70.1 vs. 66.8 on SQA; Qwen2-VL-2B: 76.9 vs. 72.6 on MMBench), nearly matching teacher performance. Using real INT4 kernel, we achieve 3$\times$ throughput with 54% memory reduction. This principled framework significantly outperforms existing quantization methods, making GRACE a compelling solution for resource-constrained deployment.
PhysioWave: A Multi-Scale Wavelet-Transformer for Physiological Signal Representation
Jun 12, 2025Physiological signals are often corrupted by motion artifacts, baseline drift, and other low-SNR disturbances, which pose significant challenges for analysis. Additionally, these signals exhibit strong non-stationarity, with sharp peaks and abrupt changes that evolve continuously, making them difficult to represent using traditional time-domain or filtering methods. To address these issues, a novel wavelet-based approach for physiological signal analysis is presented, aiming to capture multi-scale time-frequency features in various physiological signals. Leveraging this technique, two large-scale pretrained models specific to EMG and ECG are introduced for the first time, achieving superior performance and setting new baselines in downstream tasks. Additionally, a unified multi-modal framework is constructed by integrating pretrained EEG model, where each modality is guided through its dedicated branch and fused via learnable weighted fusion. This design effectively addresses challenges such as low signal-to-noise ratio, high inter-subject variability, and device mismatch, outperforming existing methods on multi-modal tasks. The proposed wavelet-based architecture lays a solid foundation for analysis of diverse physiological signals, while the multi-modal design points to next-generation physiological signal processing with potential impact on wearable health monitoring, clinical diagnostics, and broader biomedical applications.
WaveFormer: A Lightweight Transformer Model for sEMG-based Gesture Recognition
Jun 12, 2025Human-machine interaction, particularly in prosthetic and robotic control, has seen progress with gesture recognition via surface electromyographic (sEMG) signals.However, classifying similar gestures that produce nearly identical muscle signals remains a challenge, often reducing classification accuracy. Traditional deep learning models for sEMG gesture recognition are large and computationally expensive, limiting their deployment on resource-constrained embedded systems. In this work, we propose WaveFormer, a lightweight transformer-based architecture tailored for sEMG gesture recognition. Our model integrates time-domain and frequency-domain features through a novel learnable wavelet transform, enhancing feature extraction. In particular, the WaveletConv module, a multi-level wavelet decomposition layer with depthwise separable convolution, ensures both efficiency and compactness. With just 3.1 million parameters, WaveFormer achieves 95% classification accuracy on the EPN612 dataset, outperforming larger models. Furthermore, when profiled on a laptop equipped with an Intel CPU, INT8 quantization achieves real-time deployment with a 6.75 ms inference latency.
IoT System for Real-Time Near-Crash Detection for Automated Vehicle Testing
Aug 02, 2020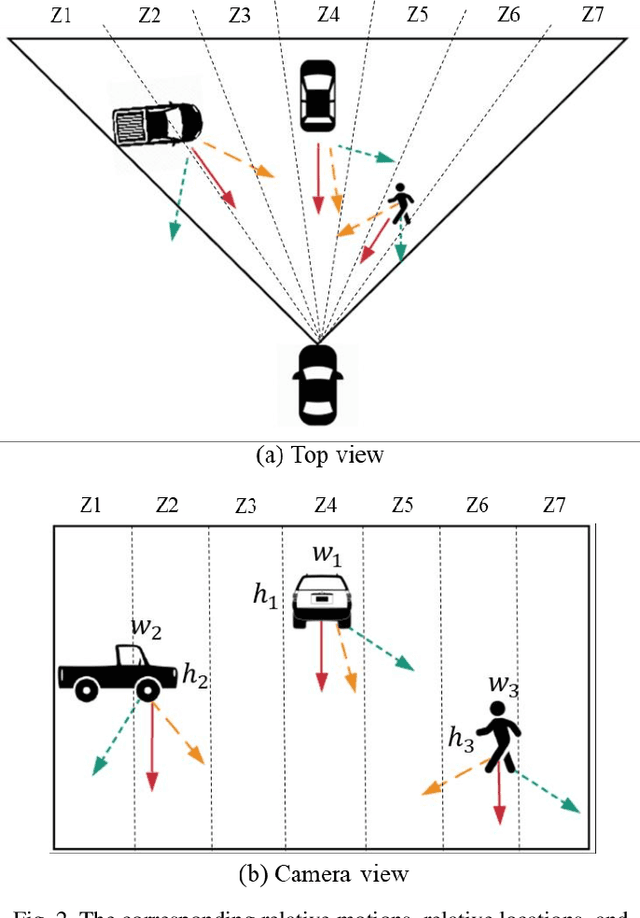
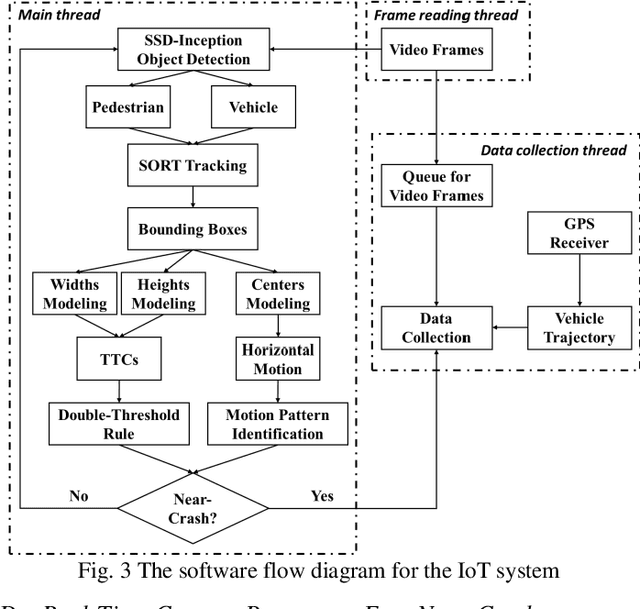
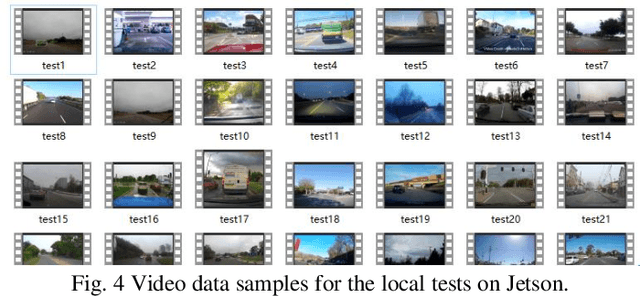

Our world is moving towards the goal of fully autonomous driving at a fast pace. While the latest automated vehicles (AVs) can handle most real-world scenarios they encounter, a major bottleneck for turning fully autonomous driving into reality is the lack of sufficient corner case data for training and testing AVs. Near-crash data, as a widely used surrogate data for traffic safety research, can also serve the purpose of AV testing if properly collected. To this end, this paper proposes an Internet-of-Things (IoT) system for real-time near-crash data collection. The system has several cool features. First, it is a low-cost and standalone system that is backward-compatible with any existing vehicles. People can fix the system to their dashboards for near-crash data collection and collision warning without the approval or help of vehicle manufacturers. Second, we propose a new near-crash detection method that models the target's size changes and relative motions with the bounding boxes generated by deep-learning-based object detection and tracking. This near-crash detection method is fast, accurate, and reliable; particularly, it is insensitive to camera parameters, thereby having an excellent transferability to different dashboard cameras. We have conducted comprehensive experiments with 100 videos locally processed at Jetson, as well as real-world tests on cars and buses. Besides collecting corner cases, it can also serve as a white-box platform for testing innovative algorithms and evaluating other AV products. The system contributes to the real-world testing of AVs and has great potential to be brought into large-scale deployment.