 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Output Gaussian Processes for Crowdsourced Traffic Data Imputation
Dec 20, 2018

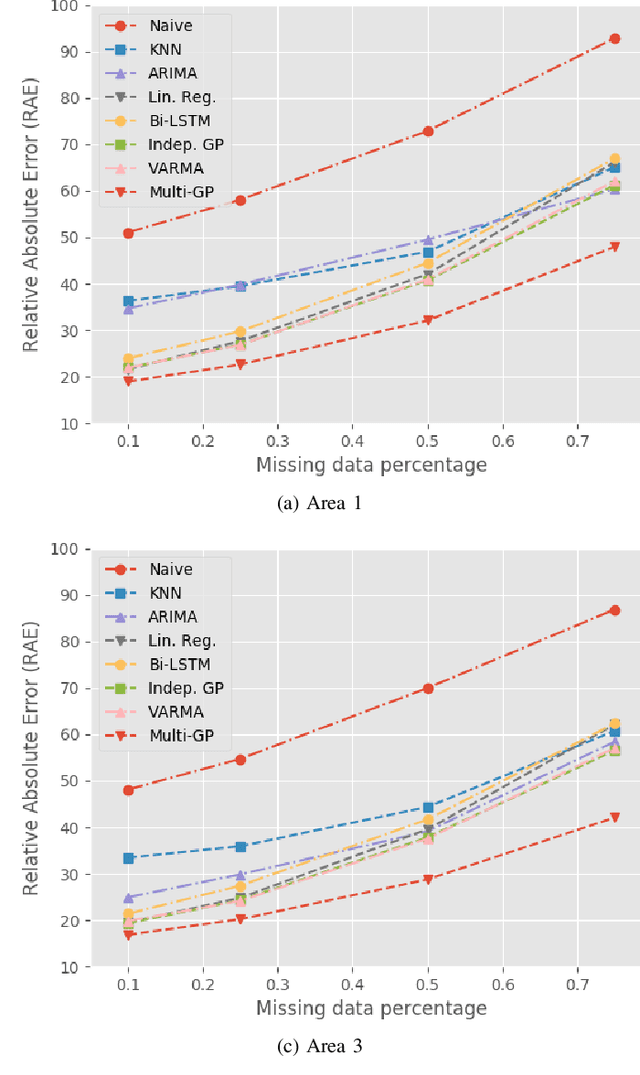

Traffic speed data imputation is a fundamental challenge for data-driven transport analysis. In recent years, with the ubiquity of GPS-enabled devices and the widespread use of crowdsourcing alternatives for the collection of traffic data, transportation professionals increasingly look to such user-generated data for many analysis, planning, and decision support applications. However, due to the mechanics of the data collection process, crowdsourced traffic data such as probe-vehicle data is highly prone to missing observations, making accurate imputation crucial for the success of any application that makes use of that type of data. In this article, we propose the use of multi-output Gaussian processes (GPs) to model the complex spatial and temporal patterns in crowdsourced traffic data. While the Bayesian nonparametric formalism of GPs allows us to model observation uncertainty, the multi-output extension based on convolution processes effectively enables us to capture complex spatial dependencies between nearby road segments. Using 6 months of crowdsourced traffic speed data or "probe vehicle data" for several locations in Copenhagen, the proposed approach is empirically shown to significantly outperform popular state-of-the-art imputation methods.
* 10 pages, IEEE Transactions on Intelligent Transportation Systems, 2018
High-Order Graph Convolutional Recurrent Neural Network: A Deep Learning Framework for Network-Scale Traffic Learning and Forecasting
Feb 20, 2018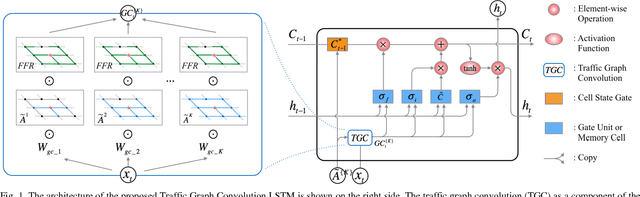
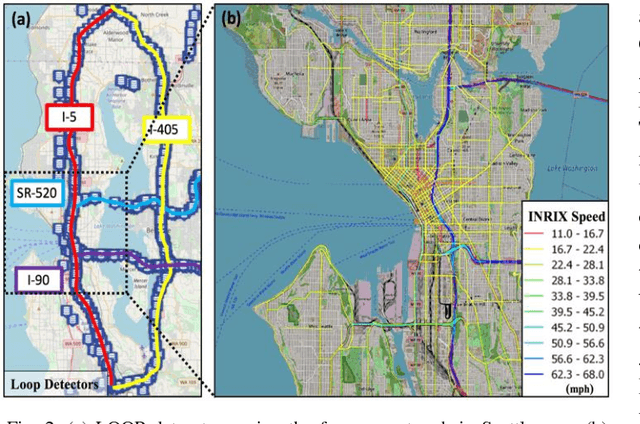
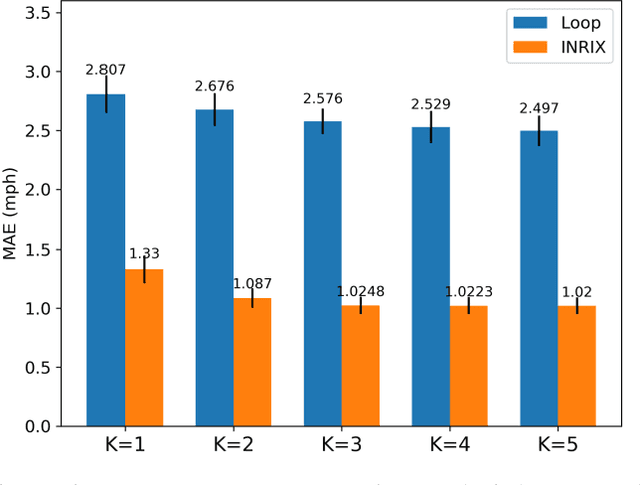
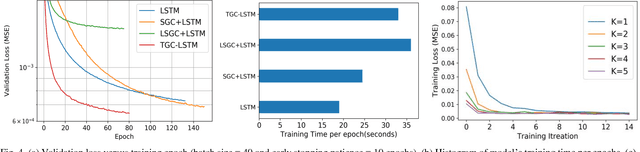
Traffic forecasting is a challenging task, due to the complicated spatial dependencies on roadway networks and the time-varying traffic patterns. To address this challenge, we learn the traffic network as a graph and propose a novel deep learning framework, High-Order Graph Convolutional Long Short-Term Memory Neural Network (HGC-LSTM), to learn the interactions between links in the traffic network and forecast the network-wide traffic state. We define the high-order traffic graph convolution based on the physical network topology. The proposed framework employs L1-norms on the graph convolution weights and L2-norms on the graph convolution features to identify the most influential links in the traffic network. We propose a novel Real-Time Branching Learning (RTBL) algorithm for the HGC-LSTM framework to accelerate the training process for spatio-temporal data. Experiments show that our HGC-LSTM network is able to capture the complex spatio-temporal dependencies efficiently present in the traffic network and consistently outperforms state-of-the-art baseline methods on two heterogeneous real-world traffic datasets. The visualization of graph convolution weights shows that the proposed framework can accurately recognize the most influential roadway segments in real-world traffic networks.