 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCHIME: A Compressive Framework for Holistic Interest Modeling
Apr 09, 2025Modeling holistic user interests is important for improving recommendation systems but is challenged by high computational cost and difficulty in handling diverse information with full behavior context. Existing search-based methods might lose critical signals during behavior selection. To overcome these limitations, we propose CHIME: A Compressive Framework for Holistic Interest Modeling. It uses adapted large language models to encode complete user behaviors with heterogeneous inputs. We introduce multi-granular contrastive learning objectives to capture both persistent and transient interest patterns and apply residual vector quantization to generate compact embeddings. CHIME demonstrates superior ranking performance across diverse datasets, establishing a robust solution for scalable holistic interest modeling in recommendation systems.
BBQRec: Behavior-Bind Quantization for Multi-Modal Sequential Recommendation
Apr 09, 2025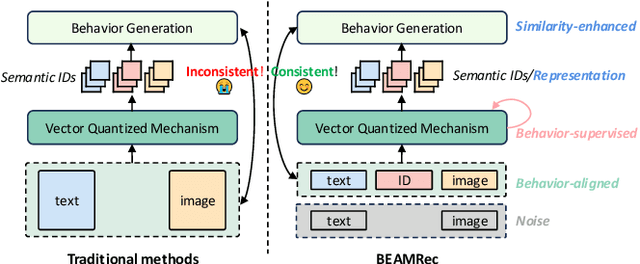
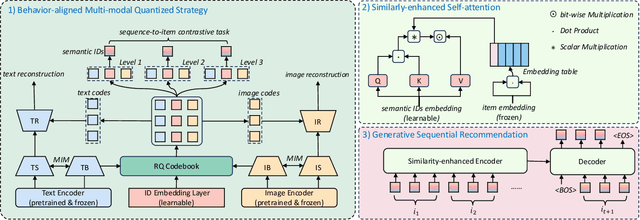
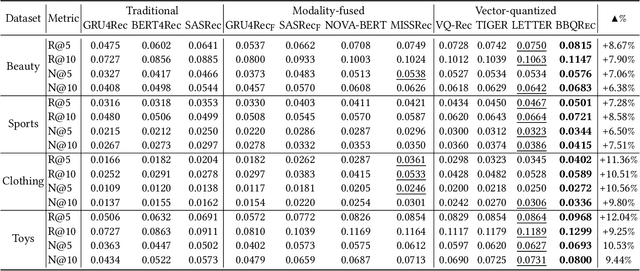
Multi-modal sequential recommendation systems leverage auxiliary signals (e.g., text, images) to alleviate data sparsity in user-item interactions. While recent methods exploit large language models to encode modalities into discrete semantic IDs for autoregressive prediction, we identify two critical limitations: (1) Existing approaches adopt fragmented quantization, where modalities are independently mapped to semantic spaces misaligned with behavioral objectives, and (2) Over-reliance on semantic IDs disrupts inter-modal semantic coherence, thereby weakening the expressive power of multi-modal representations for modeling diverse user preferences. To address these challenges, we propose a Behavior-Bind multi-modal Quantization for Sequential Recommendation (BBQRec for short) featuring dual-aligned quantization and semantics-aware sequence modeling. First, our behavior-semantic alignment module disentangles modality-agnostic behavioral patterns from noisy modality-specific features through contrastive codebook learning, ensuring semantic IDs are inherently tied to recommendation tasks. Second, we design a discretized similarity reweighting mechanism that dynamically adjusts self-attention scores using quantized semantic relationships, preserving multi-modal synergies while avoiding invasive modifications to the sequence modeling architecture. Extensive evaluations across four real-world benchmarks demonstrate BBQRec's superiority over the state-of-the-art baselines.
A Dual Iterative Refinement Method for Non-rigid Shape Matching
Jul 26, 2020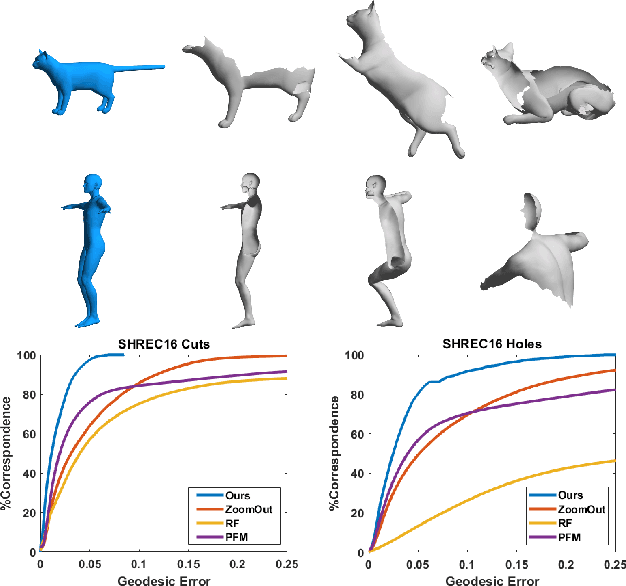
In this work, a simple and efficient dual iterative refinement (DIR) method is proposed for dense correspondence between two nearly isometric shapes. The key idea is to use dual information, such as spatial and spectral, or local and global features, in a complementary and effective way, and extract more accurate information from current iteration to use for the next iteration. In each DIR iteration, starting from current correspondence, a zoom-in process at each point is used to select well matched anchor pairs by a local mapping distortion criterion. These selected anchor pairs are then used to align spectral features (or other appropriate global features) whose dimension adaptively matches the capacity of the selected anchor pairs. Thanks to the effective combination of complementary information in a data-adaptive way, DIR is not only efficient but also robust to render accurate results within a few iterations. By choosing appropriate dual features, DIR has the flexibility to handle patch and partial matching as well. Extensive experiments on various data sets demonstrate the superiority of DIR over other state-of-the-art methods in terms of both accuracy and efficiency.
Efficient and Robust Shape Correspondence via Sparsity-Enforced Quadratic Assignment
Mar 20, 2020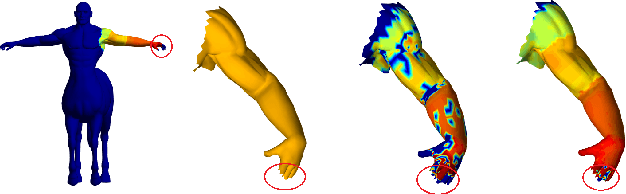
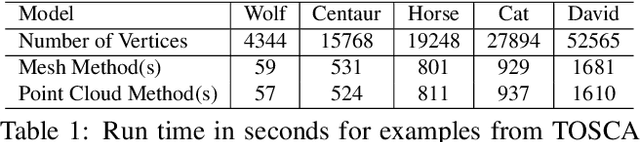
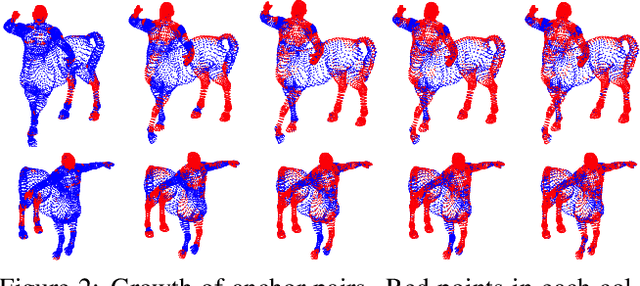
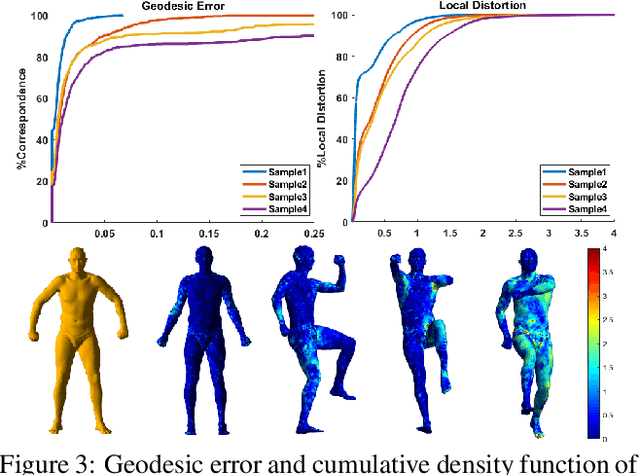
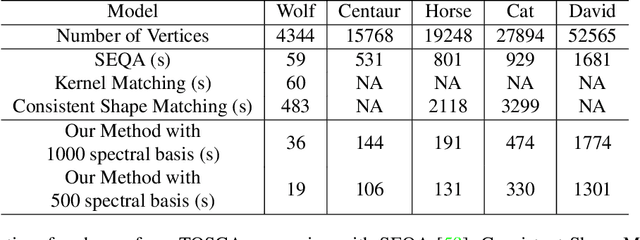
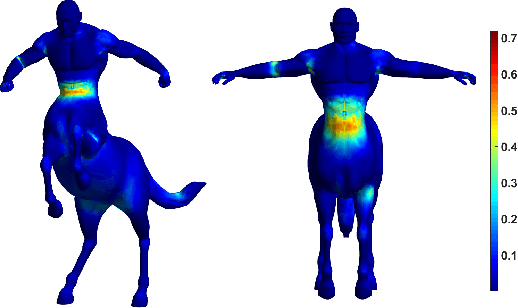
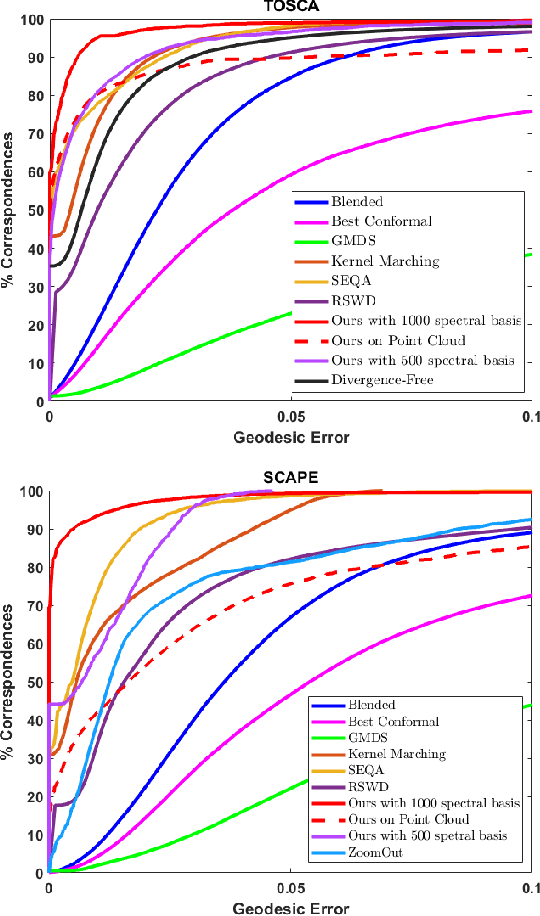
In this work, we introduce a novel local pairwise descriptor and then develop a simple, effective iterative method to solve the resulting quadratic assignment through sparsity control for shape correspondence between two approximate isometric surfaces. Our pairwise descriptor is based on the stiffness and mass matrix of finite element approximation of the Laplace-Beltrami differential operator, which is local in space, sparse to represent, and extremely easy to compute while containing global information. It allows us to deal with open surfaces, partial matching, and topological perturbations robustly. To solve the resulting quadratic assignment problem efficiently, the two key ideas of our iterative algorithm are: 1) select pairs with good (approximate) correspondence as anchor points, 2) solve a regularized quadratic assignment problem only in the neighborhood of selected anchor points through sparsity control. These two ingredients can improve and increase the number of anchor points quickly while reducing the computation cost in each quadratic assignment iteration significantly. With enough high-quality anchor points, one may use various pointwise global features with reference to these anchor points to further improve the dense shape correspondence. We use various experiments to show the efficiency, quality, and versatility of our method on large data sets, patches, and point clouds (without global meshes).
3dDepthNet: Point Cloud Guided Depth Completion Network for Sparse Depth and Single Color Image
Mar 20, 2020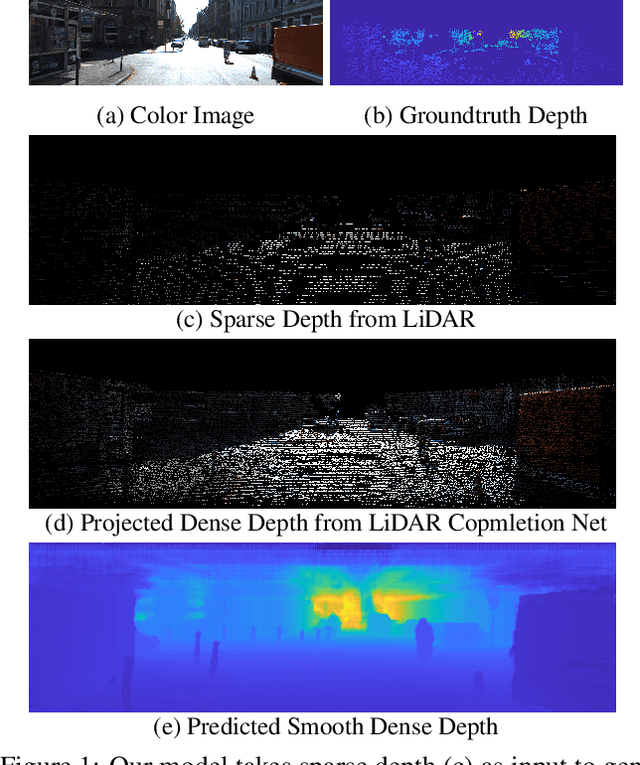
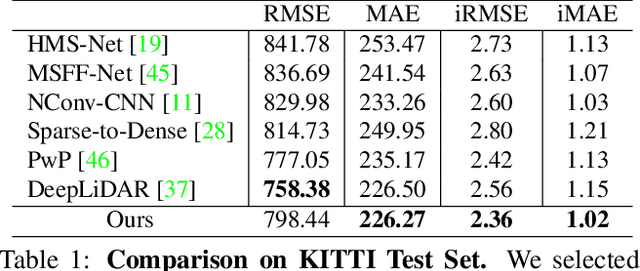

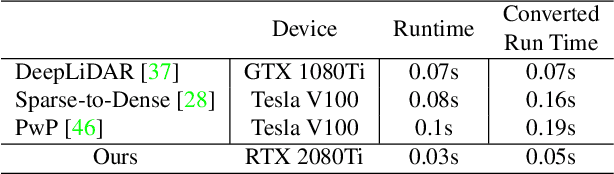
In this paper, we propose an end-to-end deep learning network named 3dDepthNet, which produces an accurate dense depth image from a single pair of sparse LiDAR depth and color image for robotics and autonomous driving tasks. Based on the dimensional nature of depth images, our network offers a novel 3D-to-2D coarse-to-fine dual densification design that is both accurate and lightweight. Depth densification is first performed in 3D space via point cloud completion, followed by a specially designed encoder-decoder structure that utilizes the projected dense depth from 3D completion and the original RGB-D images to perform 2D image completion. Experiments on the KITTI dataset show our network achieves state-of-art accuracy while being more efficient. Ablation and generalization tests prove that each module in our network has positive influences on the final results, and furthermore, our network is resilient to even sparser depth.