 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Adaptive Predictive Control for Hook-Based Aerial Transportation Between Moving Platforms
May 04, 2026This paper presents a novel model predictive control (MPC) approach for autonomous pick-and-place between moving platforms with a hook-equipped aerial manipulator. First, for accurate and rapid modeling of the complex dynamics, a digital twin model of the quadcopter equipped with a hook-based gripper, implemented in MuJoCo, is constructed and used as the predictive model for the MPC. To handle uncertainties of the predictive model (e.g. due to aerodynamics and uncertain payloads), a robust adaptive MPC approach is proposed. By systematic integration of zero-order robust optimization (zoRO) based uncertainty propagation and an extended Kalman filter (EKF) for parameter estimation, the MPC algorithm ensures robust constraint satisfaction, high performance, and computational efficiency. The effectiveness of the proposed method is evaluated in complex simulated scenarios and in real-world flight experiments.
Learning Surrogate LPV State-Space Models with Uncertainty Quantification
Mar 31, 2026The Linear Parameter-Varying (LPV) framework enables the construction of surrogate models of complex nonlinear and high-dimensional systems, facilitating efficient stability and performance analysis together with controller design. Despite significant advances in data-driven LPV modelling, existing approaches do not quantify the uncertainty of the obtained LPV models. Consequently, assessing model reliability for analysis and control or detecting operation outside the training regime requires extensive validation and user expertise. This paper proposes a Bayesian approach for the joint estimation of LPV state-space models together with their scheduling, providing a characterization of model uncertainty and confidence bounds on the predicted model response directly from input-output data. Both aleatoric uncertainty due to measurement noise and epistemic uncertainty arising from limited training data and structural bias are considered. The resulting model preserves the LPV structure required for controller synthesis while enabling computationally efficient simulation and uncertainty propagation. The approach is demonstrated on the surrogate modelling of a two-dimensional nonlinear interconnection of mass-spring-damper systems.
Efficient identification of linear, parameter-varying, and nonlinear systems with noise models
Apr 16, 2025



We present a general system identification procedure capable of estimating of a broad spectrum of state-space dynamical models, including linear time-invariant (LTI), linear parameter-varying} (LPV), and nonlinear (NL) dynamics, along with rather general classes of noise models. Similar to the LTI case, we show that for this general class of model structures, including the NL case, the model dynamics can be separated into a deterministic process and a stochastic noise part, allowing to seamlessly tune the complexity of the combined model both in terms of nonlinearity and noise modeling. We parameterize the involved nonlinear functional relations by means of artificial neural-networks (ANNs), although alternative parametric nonlinear mappings can also be used. To estimate the resulting model structures, we optimize a prediction-error-based criterion using an efficient combination of a constrained quasi-Newton approach and automatic differentiation, achieving training times in the order of seconds compared to existing state-of-the-art ANN methods which may require hours for models of similar complexity. We formally establish the consistency guarantees for the proposed approach and demonstrate its superior estimation accuracy and computational efficiency on several benchmark LTI, LPV, and NL system identification problems.
Port-Hamiltonian Neural Networks with Output Error Noise Models
Feb 20, 2025



Hamiltonian neural networks (HNNs) represent a promising class of physics-informed deep learning methods that utilize Hamiltonian theory as foundational knowledge within neural networks. However, their direct application to engineering systems is often challenged by practical issues, including the presence of external inputs, dissipation, and noisy measurements. This paper introduces a novel framework that enhances the capabilities of HNNs to address these real-life factors. We integrate port-Hamiltonian theory into the neural network structure, allowing for the inclusion of external inputs and dissipation, while mitigating the impact of measurement noise through an output-error (OE) model structure. The resulting output error port-Hamiltonian neural networks (OE-pHNNs) can be adapted to tackle modeling complex engineering systems with noisy measurements. Furthermore, we propose the identification of OE-pHNNs based on the subspace encoder approach (SUBNET), which efficiently approximates the complete simulation loss using subsections of the data and uses an encoder function to predict initial states. By integrating SUBNET with OE-pHNNs, we achieve consistent models of complex engineering systems under noisy measurements. In addition, we perform a consistency analysis to ensure the reliability of the proposed data-driven model learning method. We demonstrate the effectiveness of our approach on system identification benchmarks, showing its potential as a powerful tool for modeling dynamic systems in real-world applications.
Gaussian-Process-based Adaptive Tracking Control with Dynamic Active Learning for Autonomous Ground Vehicles
Jan 24, 2025This article proposes an active-learning-based adaptive trajectory tracking control method for autonomous ground vehicles to compensate for modeling errors and unmodeled dynamics. The nominal vehicle model is decoupled into lateral and longitudinal subsystems, which are augmented with online Gaussian Processes (GPs), using measurement data. The estimated mean functions of the GPs are used to construct a feedback compensator, which, together with an LPV state feedback controller designed for the nominal system, gives the adaptive control structure. To assist exploration of the dynamics, the paper proposes a new, dynamic active learning method to collect the most informative samples to accelerate the training process. To analyze the performance of the overall learning tool-chain provided controller, a novel iterative, counterexample-based algorithm is proposed for calculating the induced L2 gain between the reference trajectory and the tracking error. The analysis can be executed for a set of possible realizations of the to-be-controlled system, giving robust performance certificate of the learning method under variation of the vehicle dynamics. The efficiency of the proposed control approach is shown on a high-fidelity physics simulator and in real experiments using a 1/10 scale F1TENTH electric car.
Orthogonal projection-based regularization for efficient model augmentation
Jan 10, 2025Deep-learning-based nonlinear system identification has shown the ability to produce reliable and highly accurate models in practice. However, these black-box models lack physical interpretability, and often a considerable part of the learning effort is spent on capturing already expected/known behavior due to first-principles-based understanding of some aspects of the system. A potential solution is to integrate prior physical knowledge directly into the model structure, combining the strengths of physics-based modeling and deep-learning-based identification. The most common approach is to use an additive model augmentation structure, where the physics-based and the machine-learning (ML) components are connected in parallel. However, such models are overparametrized, training them is challenging, potentially causing the physics-based part to lose interpretability. To overcome this challenge, this paper proposes an orthogonal projection-based regularization technique to enhance parameter learning, convergence, and even model accuracy in learning-based augmentation of nonlinear baseline models.
Hook-Based Aerial Payload Grasping from a Moving Platform
Sep 18, 2024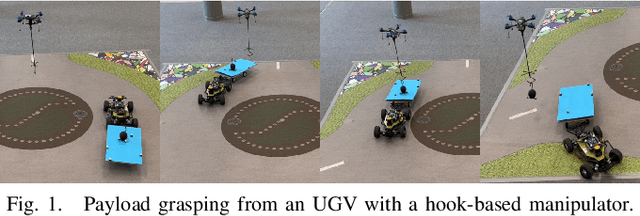
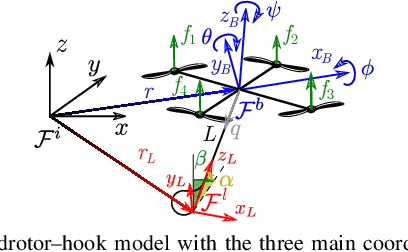
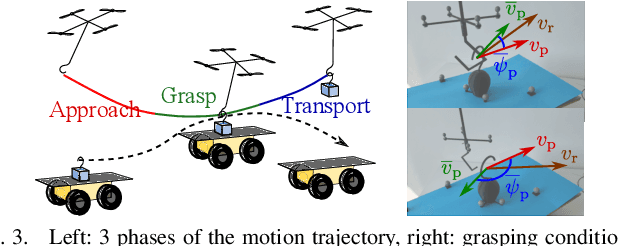
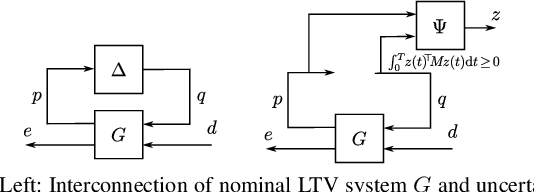
This paper investigates payload grasping from a moving platform using a hook-equipped aerial manipulator. First, a computationally efficient trajectory optimization based on complementarity constraints is proposed to determine the optimal grasping time. To enable application in complex, dynamically changing environments, the future motion of the payload is predicted using physics simulator-based models. The success of payload grasping under model uncertainties and external disturbances is formally verified through a robustness analysis method based on integral quadratic constraints. The proposed algorithms are evaluated in a high-fidelity physical simulator, and in real flight experiments using a custom-designed aerial manipulator platform.
Baseline Results for Selected Nonlinear System Identification Benchmarks
May 17, 2024

Nonlinear system identification remains an important open challenge across research and academia. Large numbers of novel approaches are seen published each year, each presenting improvements or extensions to existing methods. It is natural, therefore, to consider how one might choose between these competing models. Benchmark datasets provide one clear way to approach this question. However, to make meaningful inference based on benchmark performance it is important to understand how well a new method performs comparatively to results available with well-established methods. This paper presents a set of ten baseline techniques and their relative performances on five popular benchmarks. The aim of this contribution is to stimulate thought and discussion regarding objective comparison of identification methodologies.
State Derivative Normalization for Continuous-Time Deep Neural Networks
Jan 05, 2024
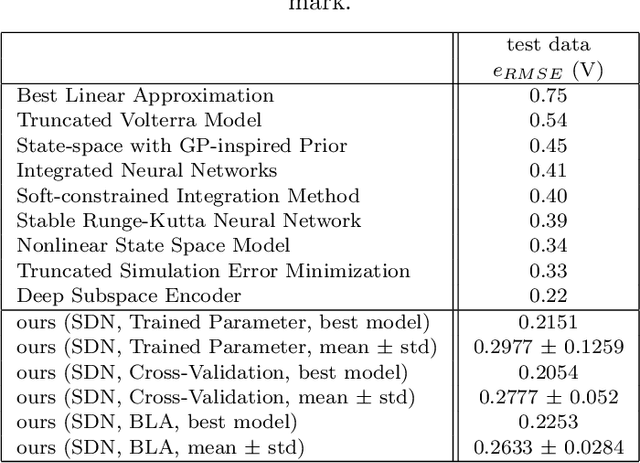


The importance of proper data normalization for deep neural networks is well known. However, in continuous-time state-space model estimation, it has been observed that improper normalization of either the hidden state or hidden state derivative of the model estimate, or even of the time interval can lead to numerical and optimization challenges with deep learning based methods. This results in a reduced model quality. In this contribution, we show that these three normalization tasks are inherently coupled. Due to the existence of this coupling, we propose a solution to all three normalization challenges by introducing a normalization constant at the state derivative level. We show that the appropriate choice of the normalization constant is related to the dynamics of the to-be-identified system and we derive multiple methods of obtaining an effective normalization constant. We compare and discuss all the normalization strategies on a benchmark problem based on experimental data from a cascaded tanks system and compare our results with other methods of the identification literature.
Modelling, identification and geometric control of autonomous quadcopters for agile maneuvering
Jun 16, 2023This paper presents a multi-step procedure to construct the dynamic motion model of an autonomous quadcopter, identify the model parameters, and design a model-based nonlinear trajectory tracking controller. The aim of the proposed method is to speed up the commissioning of a new quadcopter design, i.e., to enable the drone to perform agile maneuvers with high precision in the shortest time possible. After a brief introduction to the theoretical background of the modelling and control design, the steps of the proposed method are presented using the example of a self-developed quadcopter platform. The performance of the method is tested and evaluated by real flight experiments.