 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComponent-Aware Pruning Framework for Neural Network Controllers via Gradient-Based Importance Estimation
Jan 27, 2026The transition from monolithic to multi-component neural architectures in advanced neural network controllers poses substantial challenges due to the high computational complexity of the latter. Conventional model compression techniques for complexity reduction, such as structured pruning based on norm-based metrics to estimate the relative importance of distinct parameter groups, often fail to capture functional significance. This paper introduces a component-aware pruning framework that utilizes gradient information to compute three distinct importance metrics during training: Gradient Accumulation, Fisher Information, and Bayesian Uncertainty. Experimental results with an autoencoder and a TD-MPC agent demonstrate that the proposed framework reveals critical structural dependencies and dynamic shifts in importance that static heuristics often miss, supporting more informed compression decisions.
COMponent-Aware Pruning for Accelerated Control Tasks in Latent Space Models
Aug 11, 2025



The rapid growth of resource-constrained mobile platforms, including mobile robots, wearable systems, and Internet-of-Things devices, has increased the demand for computationally efficient neural network controllers (NNCs) that can operate within strict hardware limitations. While deep neural networks (DNNs) demonstrate superior performance in control applications, their substantial computational complexity and memory requirements present significant barriers to practical deployment on edge devices. This paper introduces a comprehensive model compression methodology that leverages component-aware structured pruning to determine the optimal pruning magnitude for each pruning group, ensuring a balance between compression and stability for NNC deployment. Our approach is rigorously evaluated on Temporal Difference Model Predictive Control (TD-MPC), a state-of-the-art model-based reinforcement learning algorithm, with a systematic integration of mathematical stability guarantee properties, specifically Lyapunov criteria. The key contribution of this work lies in providing a principled framework for determining the theoretical limits of model compression while preserving controller stability. Experimental validation demonstrates that our methodology successfully reduces model complexity while maintaining requisite control performance and stability characteristics. Furthermore, our approach establishes a quantitative boundary for safe compression ratios, enabling practitioners to systematically determine the maximum permissible model reduction before violating critical stability properties, thereby facilitating the confident deployment of compressed NNCs in resource-limited environments.
Enhanced Pruning Strategy for Multi-Component Neural Architectures Using Component-Aware Graph Analysis
Apr 17, 2025


Deep neural networks (DNNs) deliver outstanding performance, but their complexity often prohibits deployment in resource-constrained settings. Comprehensive structured pruning frameworks based on parameter dependency analysis reduce model size with specific regard to computational performance. When applying them to Multi-Component Neural Architectures (MCNAs), they risk network integrity by removing large parameter groups. We introduce a component-aware pruning strategy, extending dependency graphs to isolate individual components and inter-component flows. This creates smaller, targeted pruning groups that conserve functional integrity. Demonstrated effectively on a control task, our approach achieves greater sparsity and reduced performance degradation, opening a path for optimizing complex, multi-component DNNs efficiently.
State Derivative Normalization for Continuous-Time Deep Neural Networks
Jan 05, 2024
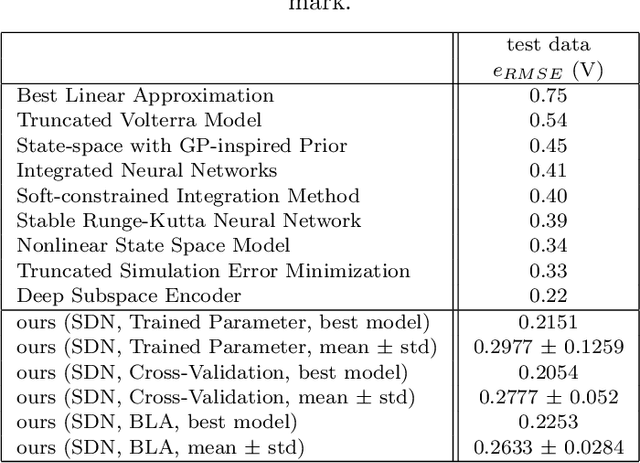


The importance of proper data normalization for deep neural networks is well known. However, in continuous-time state-space model estimation, it has been observed that improper normalization of either the hidden state or hidden state derivative of the model estimate, or even of the time interval can lead to numerical and optimization challenges with deep learning based methods. This results in a reduced model quality. In this contribution, we show that these three normalization tasks are inherently coupled. Due to the existence of this coupling, we propose a solution to all three normalization challenges by introducing a normalization constant at the state derivative level. We show that the appropriate choice of the normalization constant is related to the dynamics of the to-be-identified system and we derive multiple methods of obtaining an effective normalization constant. We compare and discuss all the normalization strategies on a benchmark problem based on experimental data from a cascaded tanks system and compare our results with other methods of the identification literature.