 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeState Derivative Normalization for Continuous-Time Deep Neural Networks
Jan 05, 2024
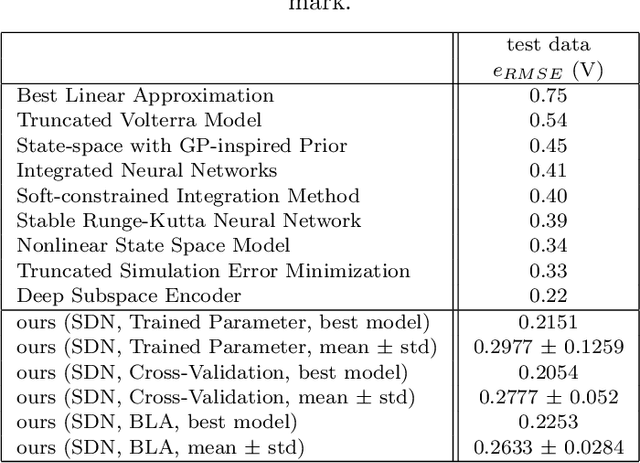


The importance of proper data normalization for deep neural networks is well known. However, in continuous-time state-space model estimation, it has been observed that improper normalization of either the hidden state or hidden state derivative of the model estimate, or even of the time interval can lead to numerical and optimization challenges with deep learning based methods. This results in a reduced model quality. In this contribution, we show that these three normalization tasks are inherently coupled. Due to the existence of this coupling, we propose a solution to all three normalization challenges by introducing a normalization constant at the state derivative level. We show that the appropriate choice of the normalization constant is related to the dynamics of the to-be-identified system and we derive multiple methods of obtaining an effective normalization constant. We compare and discuss all the normalization strategies on a benchmark problem based on experimental data from a cascaded tanks system and compare our results with other methods of the identification literature.
Flatness Based Control of an Industrial Robot Joint Using Secondary Encoders
Jan 13, 2021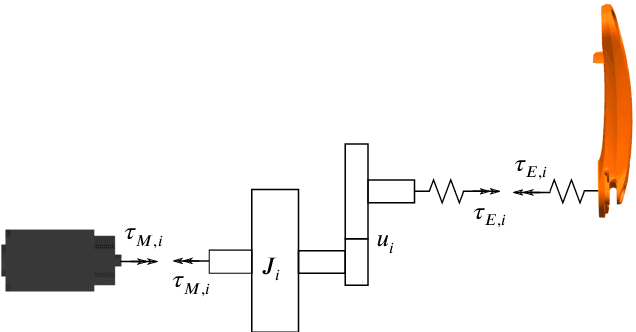
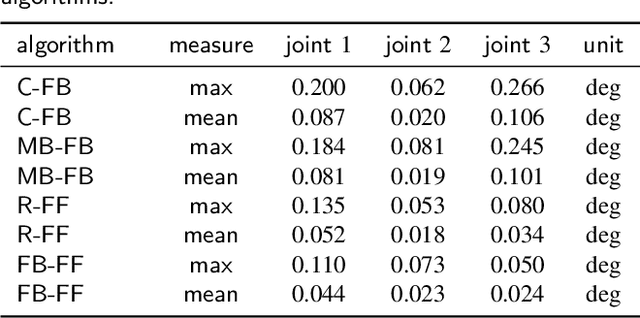
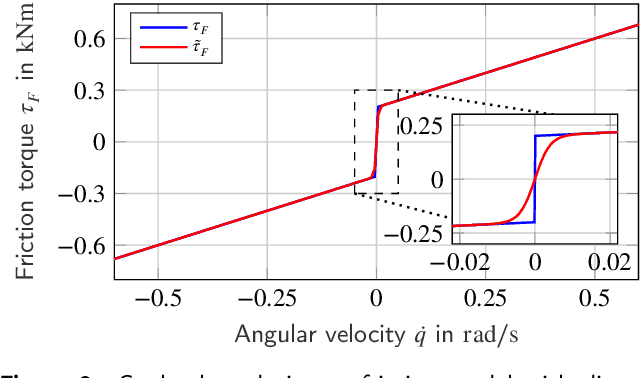
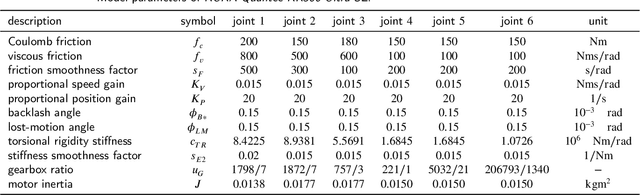
Due to their compliant structure, industrial robots without precision-enhancing measures are only to a limited extent suitable for machining applications. Apart from structural, thermal and bearing deformations, the main cause for compliant structure is backlash of transmission drives. This paper proposes a method to improve trajectory tracking accuracy by using secondary encoders and applying a feedback and a flatness based feed forward control strategy. For this purpose, a novel nonlinear, continuously differentiable dynamical model of a flexible robot joint is presented. The robot joint is modeled as a two-mass oscillator with pose-dependent inertia, nonlinear friction and nonlinear stiffness, including backlash. A flatness based feed forward control is designed to improve the guiding behaviour and a feedback controller, based on secondary encoders, is implemented for disturbance compensation. Using Automatic Differentiation, the nonlinear feed forward controller can be computed in a few microseconds online. Finally, the proposed algorithms are evaluated in simulations and experimentally on a real KUKA Quantec KR300 Ultra SE.