 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePort-Hamiltonian Neural Networks with Output Error Noise Models
Feb 20, 2025Hamiltonian neural networks (HNNs) represent a promising class of physics-informed deep learning methods that utilize Hamiltonian theory as foundational knowledge within neural networks. However, their direct application to engineering systems is often challenged by practical issues, including the presence of external inputs, dissipation, and noisy measurements. This paper introduces a novel framework that enhances the capabilities of HNNs to address these real-life factors. We integrate port-Hamiltonian theory into the neural network structure, allowing for the inclusion of external inputs and dissipation, while mitigating the impact of measurement noise through an output-error (OE) model structure. The resulting output error port-Hamiltonian neural networks (OE-pHNNs) can be adapted to tackle modeling complex engineering systems with noisy measurements. Furthermore, we propose the identification of OE-pHNNs based on the subspace encoder approach (SUBNET), which efficiently approximates the complete simulation loss using subsections of the data and uses an encoder function to predict initial states. By integrating SUBNET with OE-pHNNs, we achieve consistent models of complex engineering systems under noisy measurements. In addition, we perform a consistency analysis to ensure the reliability of the proposed data-driven model learning method. We demonstrate the effectiveness of our approach on system identification benchmarks, showing its potential as a powerful tool for modeling dynamic systems in real-world applications.
Baseline Results for Selected Nonlinear System Identification Benchmarks
May 17, 2024

Nonlinear system identification remains an important open challenge across research and academia. Large numbers of novel approaches are seen published each year, each presenting improvements or extensions to existing methods. It is natural, therefore, to consider how one might choose between these competing models. Benchmark datasets provide one clear way to approach this question. However, to make meaningful inference based on benchmark performance it is important to understand how well a new method performs comparatively to results available with well-established methods. This paper presents a set of ten baseline techniques and their relative performances on five popular benchmarks. The aim of this contribution is to stimulate thought and discussion regarding objective comparison of identification methodologies.
State Derivative Normalization for Continuous-Time Deep Neural Networks
Jan 05, 2024The importance of proper data normalization for deep neural networks is well known. However, in continuous-time state-space model estimation, it has been observed that improper normalization of either the hidden state or hidden state derivative of the model estimate, or even of the time interval can lead to numerical and optimization challenges with deep learning based methods. This results in a reduced model quality. In this contribution, we show that these three normalization tasks are inherently coupled. Due to the existence of this coupling, we propose a solution to all three normalization challenges by introducing a normalization constant at the state derivative level. We show that the appropriate choice of the normalization constant is related to the dynamics of the to-be-identified system and we derive multiple methods of obtaining an effective normalization constant. We compare and discuss all the normalization strategies on a benchmark problem based on experimental data from a cascaded tanks system and compare our results with other methods of the identification literature.
Initialization Approach for Nonlinear State-Space Identification via the Subspace Encoder Approach
Apr 06, 2023The SUBNET neural network architecture has been developed to identify nonlinear state-space models from input-output data. To achieve this, it combines the rolled-out nonlinear state-space equations and a state encoder function, both parameterised as neural networks The encoder function is introduced to reconstruct the current state from past input-output data. Hence, it enables the forward simulation of the rolled-out state-space model. While this approach has shown to provide high-accuracy and consistent model estimation, its convergence can be significantly improved by efficient initialization of the training process. This paper focuses on such an initialisation of the subspace encoder approach using the Best Linear Approximation (BLA). Using the BLA provided state-space matrices and its associated reconstructability map, both the state-transition part of the network and the encoder are initialized. The performance of the improved initialisation scheme is evaluated on a Wiener-Hammerstein simulation example and a benchmark dataset. The results show that for a weakly nonlinear system, the proposed initialisation based on the linear reconstructability map results in a faster convergence and a better model quality.
Deep Subspace Encoders for Nonlinear System Identification
Oct 26, 2022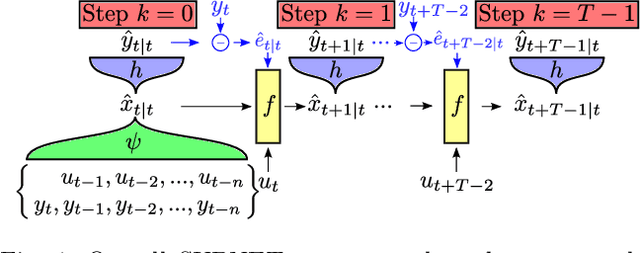
Using Artificial Neural Networks (ANN) for nonlinear system identification has proven to be a promising approach, but despite of all recent research efforts, many practical and theoretical problems still remain open. Specifically, noise handling and models, issues of consistency and reliable estimation under minimisation of the prediction error are the most severe problems. The latter comes with numerous practical challenges such as explosion of the computational cost in terms of the number of data samples and the occurrence of instabilities during optimization. In this paper, we aim to overcome these issues by proposing a method which uses a truncated prediction loss and a subspace encoder for state estimation. The truncated prediction loss is computed by selecting multiple truncated subsections from the time series and computing the average prediction loss. To obtain a computationally efficient estimation method that minimizes the truncated prediction loss, a subspace encoder represented by an artificial neural network is introduced. This encoder aims to approximate the state reconstructability map of the estimated model to provide an initial state for each truncated subsection given past inputs and outputs. By theoretical analysis, we show that, under mild conditions, the proposed method is locally consistent, increases optimization stability, and achieves increased data efficiency by allowing for overlap between the subsections. Lastly, we provide practical insights and user guidelines employing a numerical example and state-of-the-art benchmark results.