 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Adaptive Predictive Control for Hook-Based Aerial Transportation Between Moving Platforms
May 04, 2026This paper presents a novel model predictive control (MPC) approach for autonomous pick-and-place between moving platforms with a hook-equipped aerial manipulator. First, for accurate and rapid modeling of the complex dynamics, a digital twin model of the quadcopter equipped with a hook-based gripper, implemented in MuJoCo, is constructed and used as the predictive model for the MPC. To handle uncertainties of the predictive model (e.g. due to aerodynamics and uncertain payloads), a robust adaptive MPC approach is proposed. By systematic integration of zero-order robust optimization (zoRO) based uncertainty propagation and an extended Kalman filter (EKF) for parameter estimation, the MPC algorithm ensures robust constraint satisfaction, high performance, and computational efficiency. The effectiveness of the proposed method is evaluated in complex simulated scenarios and in real-world flight experiments.
DTI-GP: Bayesian operations for drug-target interactions using deep kernel Gaussian processes
Dec 31, 2025Precise probabilistic information about drug-target interaction (DTI) predictions is vital for understanding limitations and boosting predictive performance. Gaussian processes (GP) offer a scalable framework to integrate state-of-the-art DTI representations and Bayesian inference, enabling novel operations, such as Bayesian classification with rejection, top-$K$ selection, and ranking. We propose a deep kernel learning-based GP architecture (DTI-GP), which incorporates a combined neural embedding module for chemical compounds and protein targets, and a GP module. The workflow continues with sampling from the predictive distribution to estimate a Bayesian precedence matrix, which is used in fast and accurate selection and ranking operations. DTI-GP outperforms state-of-the-art solutions, and it allows (1) the construction of a Bayesian accuracy-confidence enrichment score, (2) rejection schemes for improved enrichment, and (3) estimation and search for top-$K$ selections and ranking with high expected utility.
BandiK: Efficient Multi-Task Decomposition Using a Multi-Bandit Framework
Dec 31, 2025The challenge of effectively transferring knowledge across multiple tasks is of critical importance and is also present in downstream tasks with foundation models. However, the nature of transfer, its transitive-intransitive nature, is still an open problem, and negative transfer remains a significant obstacle. Selection of beneficial auxiliary task sets in multi-task learning is frequently hindered by the high computational cost of their evaluation, the high number of plausible candidate auxiliary sets, and the varying complexity of selection across target tasks. To address these constraints, we introduce BandiK, a novel three-stage multi-task auxiliary task subset selection method using multi-bandits, where each arm pull evaluates candidate auxiliary sets by training and testing a multiple output neural network on a single random train-test dataset split. Firstly, BandiK estimates the pairwise transfers between tasks, which helps in identifying which tasks are likely to benefit from joint learning. In the second stage, it constructs a linear number of candidate sets of auxiliary tasks (in the number of all tasks) for each target task based on the initial estimations, significantly reducing the exponential number of potential auxiliary task sets. Thirdly, it employs a Multi-Armed Bandit (MAB) framework for each task, where the arms correspond to the performance of candidate auxiliary sets realized as multiple output neural networks over train-test data set splits. To enhance efficiency, BandiK integrates these individual task-specific MABs into a multi-bandit structure. The proposed multi-bandit solution exploits that the same neural network realizes multiple arms of different individual bandits corresponding to a given candidate set. This semi-overlapping arm property defines a novel multi-bandit cost/reward structure utilized in BandiK.
Characterization of Transfer Using Multi-task Learning Curves
Dec 31, 2025Transfer effects manifest themselves both during training using a fixed data set and in inductive inference using accumulating data. We hypothesize that perturbing the data set by including more samples, instead of perturbing the model by gradient updates, provides a complementary and more fundamental characterization of transfer effects. To capture this phenomenon, we quantitatively model transfer effects using multi-task learning curves approximating the inductive performance over varying sample sizes. We describe an efficient method to approximate multi-task learning curves analogous to the Task Affinity Grouping method applied during training. We compare the statistical and computational approaches to transfer, which indicates considerably higher compute costs for the previous but better power and broader applicability. Evaluations are performed using a benchmark drug-target interaction data set. Our results show that learning curves can better capture the effects of multi-task learning and their multi-task extensions can delineate pairwise and contextual transfer effects in foundation models.
Semi-overlapping Multi-bandit Best Arm Identification for Sequential Support Network Learning
Dec 31, 2025Many modern AI and ML problems require evaluating partners' contributions through shared yet asymmetric, computationally intensive processes and the simultaneous selection of the most beneficial candidates. Sequential approaches to these problems can be unified under a new framework, Sequential Support Network Learning (SSNL), in which the goal is to select the most beneficial candidate set of partners for all participants using trials; that is, to learn a directed graph that represents the highest-performing contributions. We demonstrate that a new pure-exploration model, the semi-overlapping multi-(multi-armed) bandit (SOMMAB), in which a single evaluation provides distinct feedback to multiple bandits due to structural overlap among their arms, can be used to learn a support network from sparse candidate lists efficiently. We develop a generalized GapE algorithm for SOMMABs and derive new exponential error bounds that improve the best known constant in the exponent for multi-bandit best-arm identification. The bounds scale linearly with the degree of overlap, revealing significant sample-complexity gains arising from shared evaluations. From an application point of view, this work provides a theoretical foundation and improved performance guarantees for sequential learning tools for identifying support networks from sparse candidates in multiple learning problems, such as in multi-task learning (MTL), auxiliary task learning (ATL), federated learning (FL), and in multi-agent systems (MAS).
Hook-Based Aerial Payload Grasping from a Moving Platform
Sep 18, 2024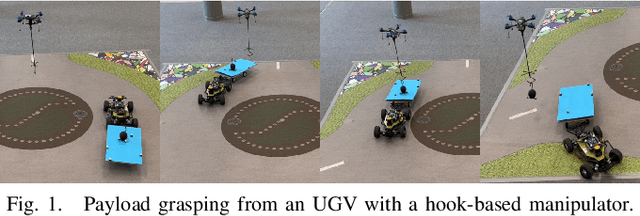
This paper investigates payload grasping from a moving platform using a hook-equipped aerial manipulator. First, a computationally efficient trajectory optimization based on complementarity constraints is proposed to determine the optimal grasping time. To enable application in complex, dynamically changing environments, the future motion of the payload is predicted using physics simulator-based models. The success of payload grasping under model uncertainties and external disturbances is formally verified through a robustness analysis method based on integral quadratic constraints. The proposed algorithms are evaluated in a high-fidelity physical simulator, and in real flight experiments using a custom-designed aerial manipulator platform.
Modelling, identification and geometric control of autonomous quadcopters for agile maneuvering
Jun 16, 2023This paper presents a multi-step procedure to construct the dynamic motion model of an autonomous quadcopter, identify the model parameters, and design a model-based nonlinear trajectory tracking controller. The aim of the proposed method is to speed up the commissioning of a new quadcopter design, i.e., to enable the drone to perform agile maneuvers with high precision in the shortest time possible. After a brief introduction to the theoretical background of the modelling and control design, the steps of the proposed method are presented using the example of a self-developed quadcopter platform. The performance of the method is tested and evaluated by real flight experiments.
Payload Grasping and Transportation by a Quadrotor with a Hook-Based Manipulator
Apr 05, 2023The paper proposes an efficient trajectory planning and control approach for payload grasping and transportation using an aerial manipulator. The proposed manipulator structure consists of a hook attached to a quadrotor using a 1 DoF revolute joint. To perform payload grasping, transportation, and release, first, time-optimal reference trajectories are designed through specific waypoints to ensure the fast and reliable execution of the tasks. Then, a two-stage motion control approach is developed based on a robust geometric controller for precise and reliable reference tracking and a linear--quadratic payload regulator for rapid setpoint stabilization of the payload swing. The proposed control architecture and design are evaluated in a high-fidelity physical simulator with external disturbances and also in real flight experiments.
Backflipping with Miniature Quadcopters by Gaussian Process Based Control and Planning
Sep 29, 2022
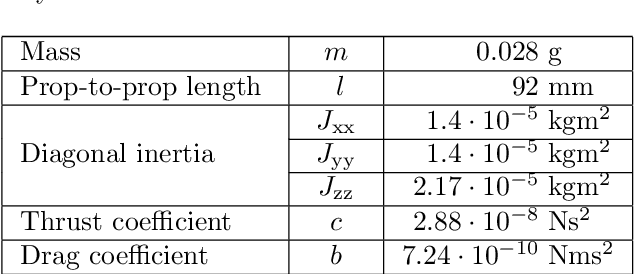

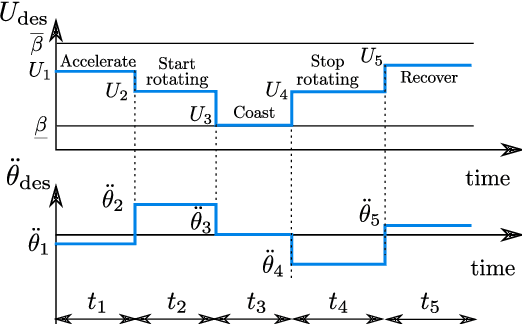
The paper proposes two control methods for performing a backflip maneuver with miniature quadcopters. First, an existing feedforward control strategy designed specifically for backflipping is revised and improved. Bayesian optimization with surrogate Gaussian Process model is applied to find the optimal sequence of motion primitives by performing the flip maneuver repeatedly in a simulation environment. The second method is based on closed-loop control and it consists of two main steps: first a novel robust, adaptive controller is designed to provide reliable reference tracking even in the case of model uncertainties. The controller is constructed by augmenting the nominal model of the drone with a Gaussian Process that is tuned by measurement data. Second, an efficient trajectory planning algorithm is proposed, which designs feasible trajectories for the backflip maneuver by using only quadratic programming. The two approaches are analyzed in simulations and in real experiments using Bitcraze Crazyflie 2.1 quadcopters.