 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHook-Based Aerial Payload Grasping from a Moving Platform
Paper and Code
Sep 18, 2024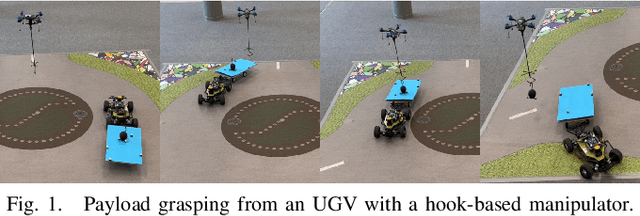
This paper investigates payload grasping from a moving platform using a hook-equipped aerial manipulator. First, a computationally efficient trajectory optimization based on complementarity constraints is proposed to determine the optimal grasping time. To enable application in complex, dynamically changing environments, the future motion of the payload is predicted using physics simulator-based models. The success of payload grasping under model uncertainties and external disturbances is formally verified through a robustness analysis method based on integral quadratic constraints. The proposed algorithms are evaluated in a high-fidelity physical simulator, and in real flight experiments using a custom-designed aerial manipulator platform.