 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGaussian-Process-based Adaptive Tracking Control with Dynamic Active Learning for Autonomous Ground Vehicles
Jan 24, 2025This article proposes an active-learning-based adaptive trajectory tracking control method for autonomous ground vehicles to compensate for modeling errors and unmodeled dynamics. The nominal vehicle model is decoupled into lateral and longitudinal subsystems, which are augmented with online Gaussian Processes (GPs), using measurement data. The estimated mean functions of the GPs are used to construct a feedback compensator, which, together with an LPV state feedback controller designed for the nominal system, gives the adaptive control structure. To assist exploration of the dynamics, the paper proposes a new, dynamic active learning method to collect the most informative samples to accelerate the training process. To analyze the performance of the overall learning tool-chain provided controller, a novel iterative, counterexample-based algorithm is proposed for calculating the induced L2 gain between the reference trajectory and the tracking error. The analysis can be executed for a set of possible realizations of the to-be-controlled system, giving robust performance certificate of the learning method under variation of the vehicle dynamics. The efficiency of the proposed control approach is shown on a high-fidelity physics simulator and in real experiments using a 1/10 scale F1TENTH electric car.
Orthogonal projection-based regularization for efficient model augmentation
Jan 10, 2025Deep-learning-based nonlinear system identification has shown the ability to produce reliable and highly accurate models in practice. However, these black-box models lack physical interpretability, and often a considerable part of the learning effort is spent on capturing already expected/known behavior due to first-principles-based understanding of some aspects of the system. A potential solution is to integrate prior physical knowledge directly into the model structure, combining the strengths of physics-based modeling and deep-learning-based identification. The most common approach is to use an additive model augmentation structure, where the physics-based and the machine-learning (ML) components are connected in parallel. However, such models are overparametrized, training them is challenging, potentially causing the physics-based part to lose interpretability. To overcome this challenge, this paper proposes an orthogonal projection-based regularization technique to enhance parameter learning, convergence, and even model accuracy in learning-based augmentation of nonlinear baseline models.
Hook-Based Aerial Payload Grasping from a Moving Platform
Sep 18, 2024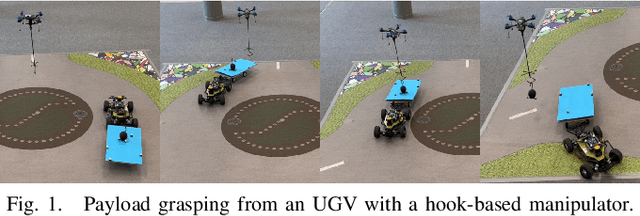
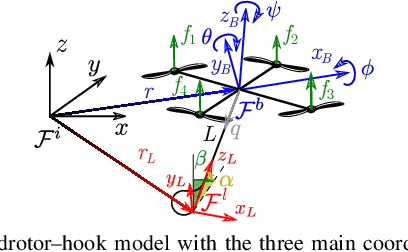
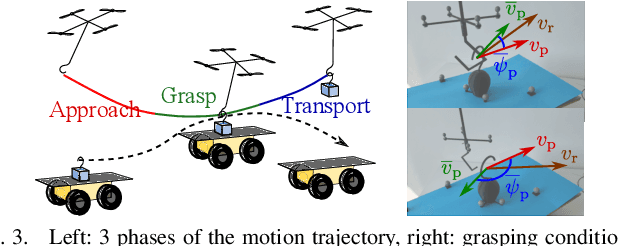
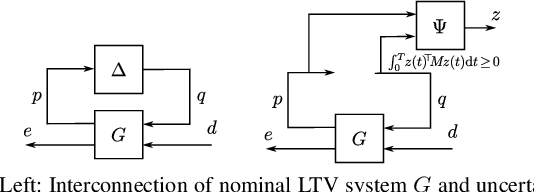
This paper investigates payload grasping from a moving platform using a hook-equipped aerial manipulator. First, a computationally efficient trajectory optimization based on complementarity constraints is proposed to determine the optimal grasping time. To enable application in complex, dynamically changing environments, the future motion of the payload is predicted using physics simulator-based models. The success of payload grasping under model uncertainties and external disturbances is formally verified through a robustness analysis method based on integral quadratic constraints. The proposed algorithms are evaluated in a high-fidelity physical simulator, and in real flight experiments using a custom-designed aerial manipulator platform.
Modelling, identification and geometric control of autonomous quadcopters for agile maneuvering
Jun 16, 2023This paper presents a multi-step procedure to construct the dynamic motion model of an autonomous quadcopter, identify the model parameters, and design a model-based nonlinear trajectory tracking controller. The aim of the proposed method is to speed up the commissioning of a new quadcopter design, i.e., to enable the drone to perform agile maneuvers with high precision in the shortest time possible. After a brief introduction to the theoretical background of the modelling and control design, the steps of the proposed method are presented using the example of a self-developed quadcopter platform. The performance of the method is tested and evaluated by real flight experiments.
Payload Grasping and Transportation by a Quadrotor with a Hook-Based Manipulator
Apr 05, 2023The paper proposes an efficient trajectory planning and control approach for payload grasping and transportation using an aerial manipulator. The proposed manipulator structure consists of a hook attached to a quadrotor using a 1 DoF revolute joint. To perform payload grasping, transportation, and release, first, time-optimal reference trajectories are designed through specific waypoints to ensure the fast and reliable execution of the tasks. Then, a two-stage motion control approach is developed based on a robust geometric controller for precise and reliable reference tracking and a linear--quadratic payload regulator for rapid setpoint stabilization of the payload swing. The proposed control architecture and design are evaluated in a high-fidelity physical simulator with external disturbances and also in real flight experiments.
Backflipping with Miniature Quadcopters by Gaussian Process Based Control and Planning
Sep 29, 2022
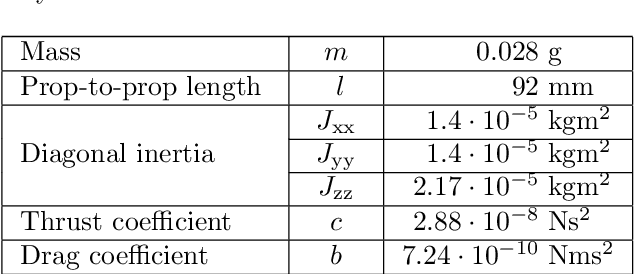

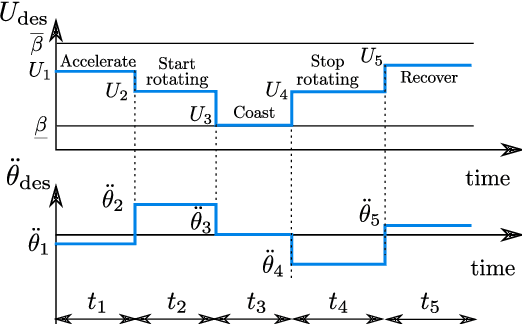
The paper proposes two control methods for performing a backflip maneuver with miniature quadcopters. First, an existing feedforward control strategy designed specifically for backflipping is revised and improved. Bayesian optimization with surrogate Gaussian Process model is applied to find the optimal sequence of motion primitives by performing the flip maneuver repeatedly in a simulation environment. The second method is based on closed-loop control and it consists of two main steps: first a novel robust, adaptive controller is designed to provide reliable reference tracking even in the case of model uncertainties. The controller is constructed by augmenting the nominal model of the drone with a Gaussian Process that is tuned by measurement data. Second, an efficient trajectory planning algorithm is proposed, which designs feasible trajectories for the backflip maneuver by using only quadratic programming. The two approaches are analyzed in simulations and in real experiments using Bitcraze Crazyflie 2.1 quadcopters.