 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertainty-Driven Radar-Inertial Fusion for Instantaneous 3D Ego-Velocity Estimation
Jun 17, 2025We present a method for estimating ego-velocity in autonomous navigation by integrating high-resolution imaging radar with an inertial measurement unit. The proposed approach addresses the limitations of traditional radar-based ego-motion estimation techniques by employing a neural network to process complex-valued raw radar data and estimate instantaneous linear ego-velocity along with its associated uncertainty. This uncertainty-aware velocity estimate is then integrated with inertial measurement unit data using an Extended Kalman Filter. The filter leverages the network-predicted uncertainty to refine the inertial sensor's noise and bias parameters, improving the overall robustness and accuracy of the ego-motion estimation. We evaluated the proposed method on the publicly available ColoRadar dataset. Our approach achieves significantly lower error compared to the closest publicly available method and also outperforms both instantaneous and scan matching-based techniques.
Safe Control using Occupancy Grid Map-based Control Barrier Function
May 17, 2024Safe navigation in unknown environments stands as a significant challenge in the field of robotics. Control Barrier Function (CBF) is a strong mathematical tool to guarantee safety requirements. However, a common assumption in many works is that the CBF is already known and obstacles have predefined shapes. In this letter, we present a novel method called Occupancy Grid Map-based Control Barrier Function (OGM-CBF), which defines Control Barrier Function based on Occupancy Grid Maps. This enables generalization to unknown environments while generating online local or global maps of the environment using onboard perception sensors such as LiDAR or camera. With this method, the system guarantees safety via a single, continuously differentiable CBF per time step, which can be represented as one constraint in the CBF-QP optimization formulation while having an arbitrary number of obstacles with unknown shapes in the environment. This enables practical real-time implementation of CBF in both unknown and known environments. The efficacy of OGM-CBF is demonstrated in the safe control of an autonomous car in the CARLA simulator and a real-world industrial mobile robot.
Motion-based extrinsic sensor-to-sensor calibration: Effect of reference frame selection for new and existing methods
Mar 06, 2023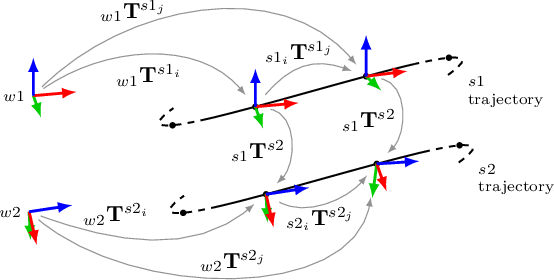
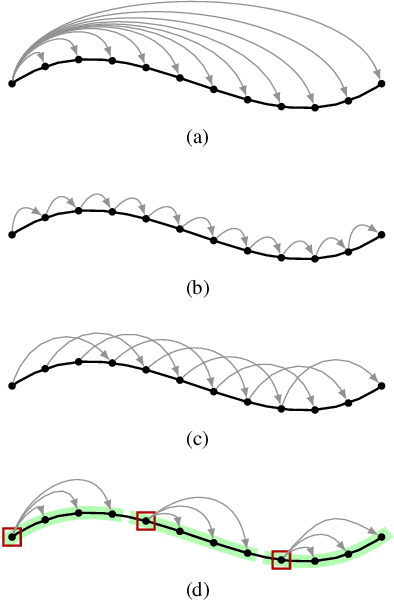
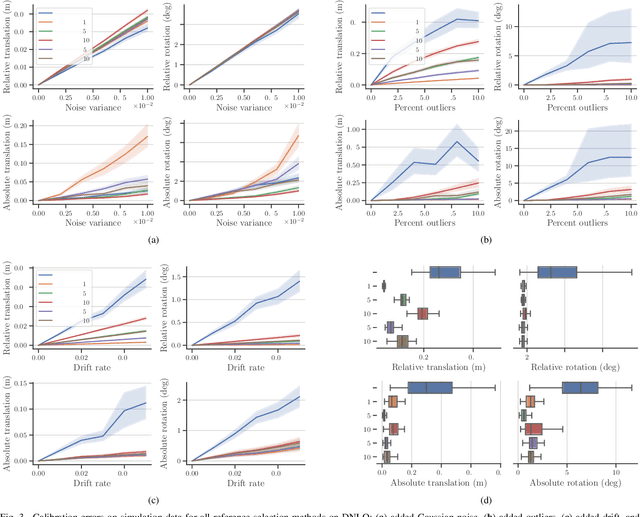

This paper studies the effect of reference frame selection in sensor-to-sensor extrinsic calibration when formulated as a motion-based hand-eye calibration problem. Different reference selection options are tested under varying noise conditions in simulation, and the findings are validated with real data from the KITTI dataset. We propose two nonlinear cost functions for optimization and compare them with four state-of-the-art methods. One of the proposed cost functions incorporates outlier rejection to improve calibration performance and was shown to significantly improve performance in the presence of outliers, and either match or outperform the other algorithms in other noise conditions. However, the performance gain from reference frame selection was deemed larger than that from algorithm selection. In addition, we show that with realistic noise, the reference frame selection method commonly used in literature is inferior to other tested options, and that relative error metrics are not reliable for telling which method achieves best calibration performance.
Evaluation and comparison of eight popular Lidar and Visual SLAM algorithms
Aug 03, 2022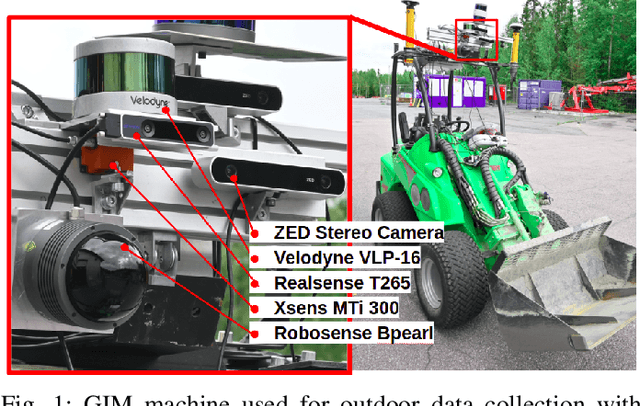
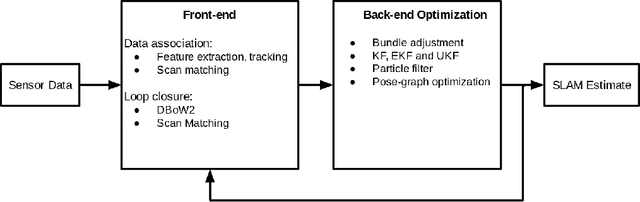

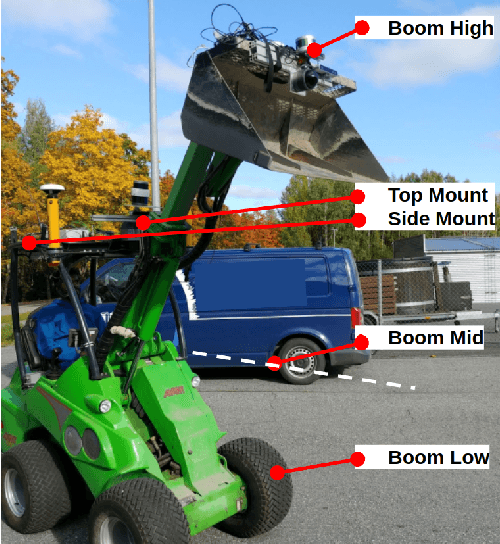
In this paper, we evaluate eight popular and open-source 3D Lidar and visual SLAM (Simultaneous Localization and Mapping) algorithms, namely LOAM, Lego LOAM, LIO SAM, HDL Graph, ORB SLAM3, Basalt VIO, and SVO2. We have devised experiments both indoor and outdoor to investigate the effect of the following items: i) effect of mounting positions of the sensors, ii) effect of terrain type and vibration, iii) effect of motion (variation in linear and angular speed). We compare their performance in terms of relative and absolute pose error. We also provide comparison on their required computational resources. We thoroughly analyse and discuss the results and identify the best performing system for the environment cases with our multi-camera and multi-Lidar indoor and outdoor datasets. We hope our findings help one to choose a sensor and the corresponding SLAM algorithm combination suiting their needs, based on their target environment.
GPU-Accelerated Policy Optimization via Batch Automatic Differentiation of Gaussian Processes for Real-World Control
Feb 28, 2022
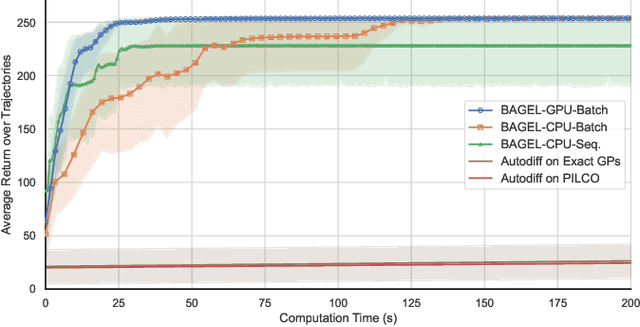
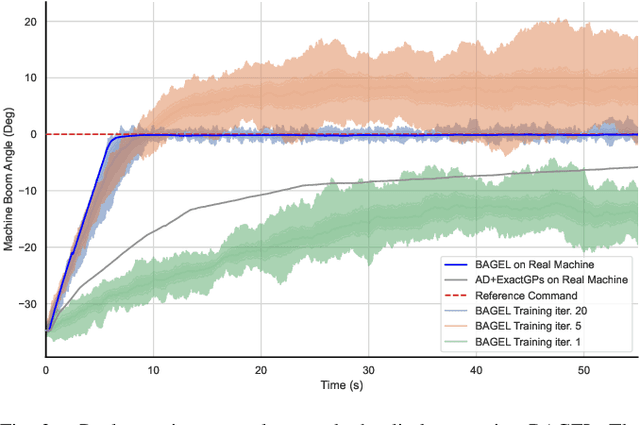
The ability of Gaussian processes (GPs) to predict the behavior of dynamical systems as a more sample-efficient alternative to parametric models seems promising for real-world robotics research. However, the computational complexity of GPs has made policy search a highly time and memory consuming process that has not been able to scale to larger problems. In this work, we develop a policy optimization method by leveraging fast predictive sampling methods to process batches of trajectories in every forward pass, and compute gradient updates over policy parameters by automatic differentiation of Monte Carlo evaluations, all on GPU. We demonstrate the effectiveness of our approach in training policies on a set of reference-tracking control experiments with a heavy-duty machine. Benchmark results show a significant speedup over exact methods and showcase the scalability of our method to larger policy networks, longer horizons, and up to thousands of trajectories with a sublinear drop in speed.
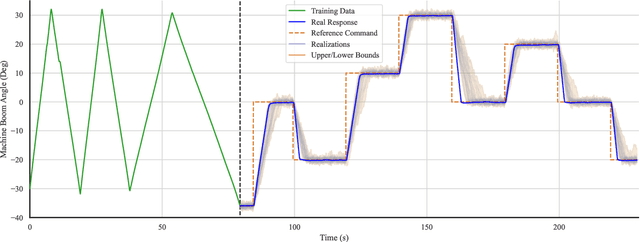
Neural Network Controller for Autonomous Pile Loading Revised
Mar 23, 2021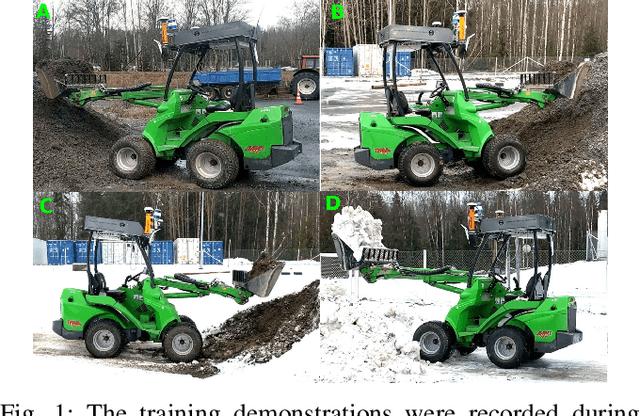
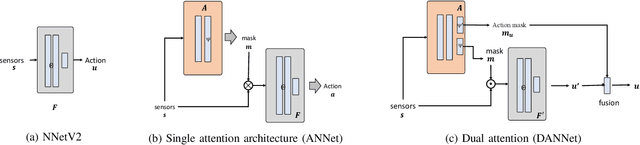
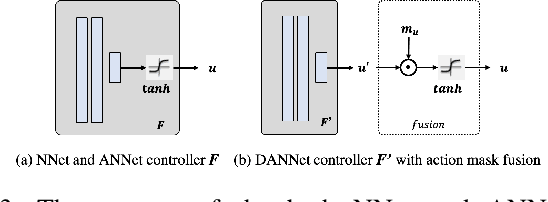
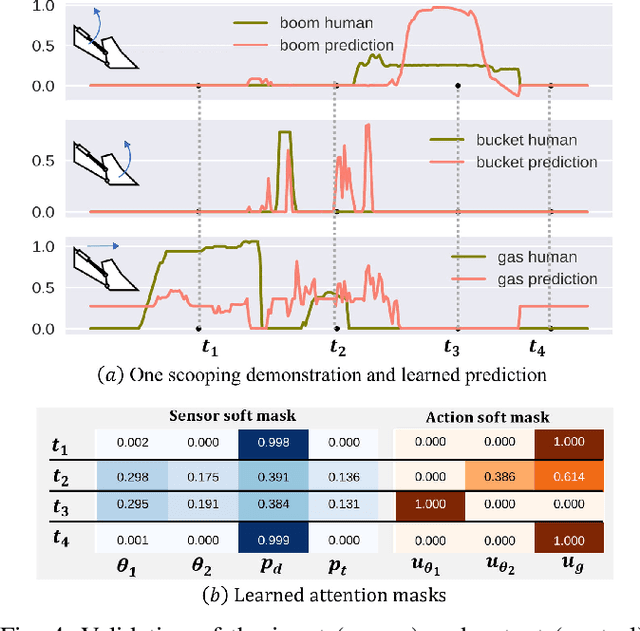
We have recently proposed two pile loading controllers that learn from human demonstrations: a neural network (NNet) [1] and a random forest (RF) controller [2]. In the field experiments the RF controller obtained clearly better success rates. In this work, the previous findings are drastically revised by experimenting summer time trained controllers in winter conditions. The winter experiments revealed a need for additional sensors, more training data, and a controller that can take advantage of these. Therefore, we propose a revised neural controller (NNetV2) which has a more expressive structure and uses a neural attention mechanism to focus on important parts of the sensor and control signals. Using the same data and sensors to train and test the three controllers, NNetV2 achieves better robustness against drastically changing conditions and superior success rate. To the best of our knowledge, this is the first work testing a learning-based controller for a heavy-duty machine in drastically varying outdoor conditions and delivering high success rate in winter, being trained in summer.
Surface Type Classification for Autonomous Robot Indoor Navigation
May 01, 2019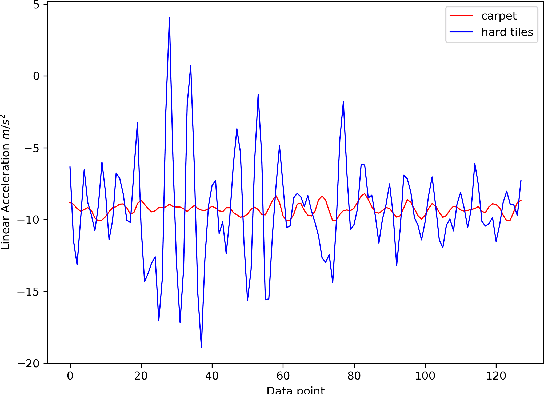
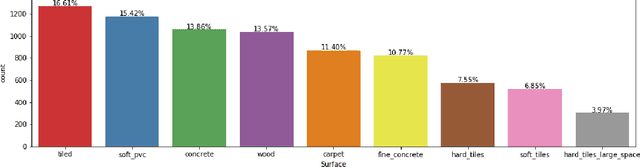
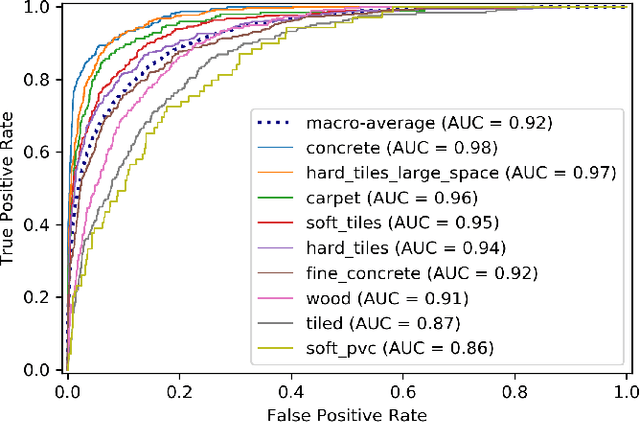
In this work we describe the preparation of a time series dataset of inertial measurements for determining the surface type under a wheeled robot. The data consists of over 7600 labeled time series samples, with the corresponding surface type annotation. This data was used in two public competitions with over 1500 participant in total. Additionally, we describe the performance of state-of-art deep learning models for time series classification, as well as propose a baseline model based on an ensemble of machine learning methods. The baseline achieves an accuracy of over 68% with our nine-category dataset.
Inducing Multi-Convexity in Path Constrained Trajectory Optimization for Mobile Manipulators
Apr 22, 2019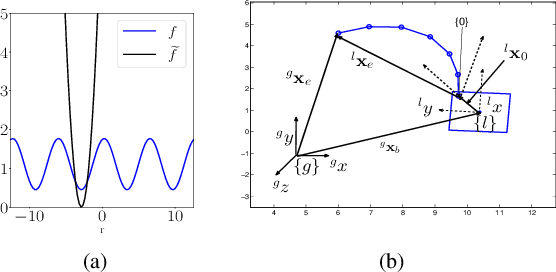
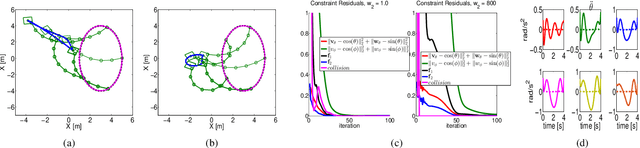
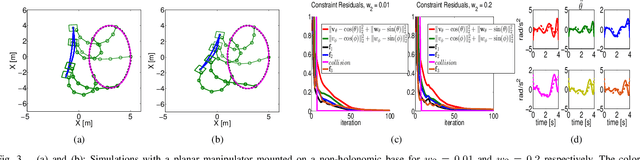
In this paper, we propose a novel trajectory optimization algorithm for mobile manipulators under end-effector path, collision avoidance and various kinematic constraints. Our key contribution lies in showing how this highly non-linear and non-convex problem can be solved as a sequence of convex unconstrained quadratic programs (QPs). This is achieved by reformulating the non-linear constraints that arise out of manipulator kinematics and its coupling with the mobile base in a multi-affine form. We then use techniques from Alternating Direction Method of Multipliers (ADMM) to formulate and solve the trajectory optimization problem. The proposed ADMM has two similar non-convex steps. Importantly, a convex surrogate can be derived for each of them. We show how large parts of our optimization can be solved in parallel providing the possibility of exploiting multi-core CPUs/GPUs. We validate our trajectory optimization on different benchmark examples. Specifically, we highlight how it solves the cyclicity bottleneck and provides a holistic approach where diverse set of trajectories can be obtained by trading-off different aspects of manipulator and mobile base motion.
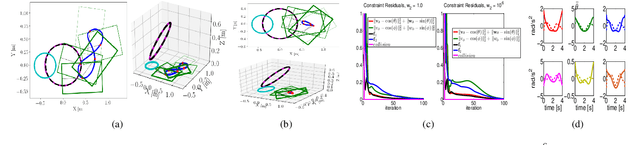
Kinematics and Dynamic Modeling of a Planar Hydraulic Elastomer Actuator
Jun 13, 2018
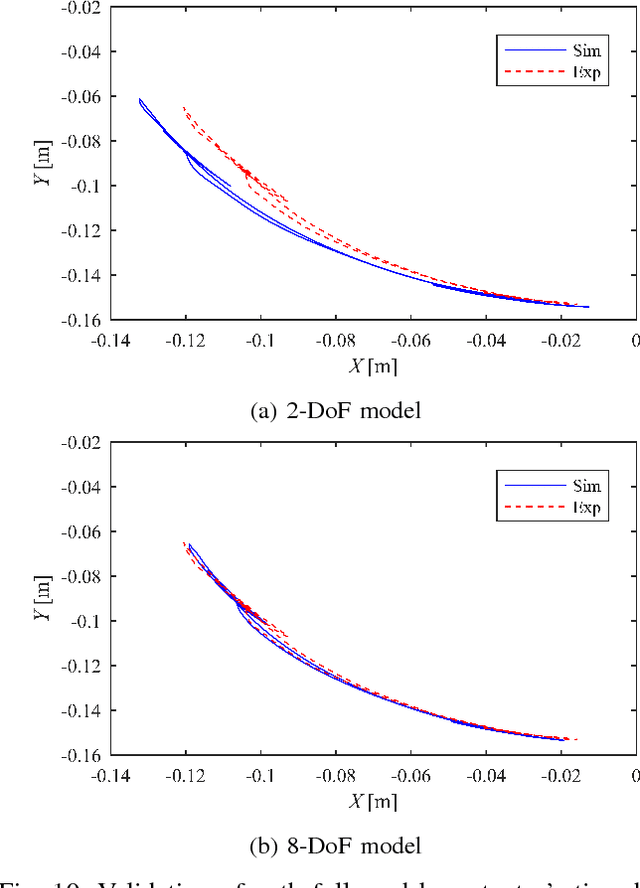

This paper presents modeling of a compliant 2D manipulator, a so called soft hydraulic/fluidic elastomer actuator. Our focus is on fiber-Reinforced Fluidic Elastomer Actuators (RFEA) driven by a constant pressure hydraulic supply and modulated on/off valves. We present a model that not only provides the dynamics behavior of the system but also the kinematics of the actuator. In addition to that, the relation between the applied hydraulic pressure and the bending angle of the soft actuator and thus, its tip position is formulated in a systematic way. We also present a steady state model that calculates the bending angle given the fluid pressure which can be beneficial to find out the initial values of the parameters during the system identification process. Our experimental results verify and validate the performance of the proposed modeling approach both in transition and steady states. Due to its inherent simplicity, this model shall also be used in real-time control of the soft actuators.
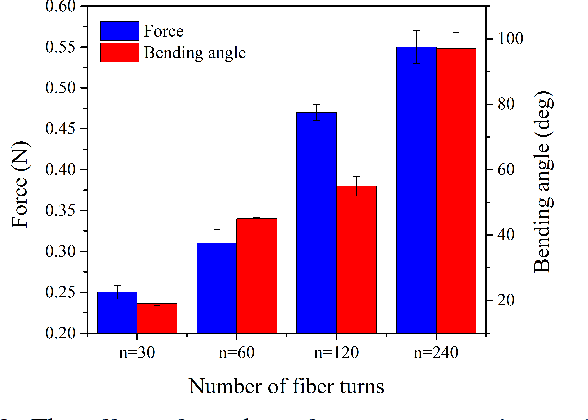
Design, Fabrication and Control of an Hydraulic Elastomer Actuator
Jun 13, 2018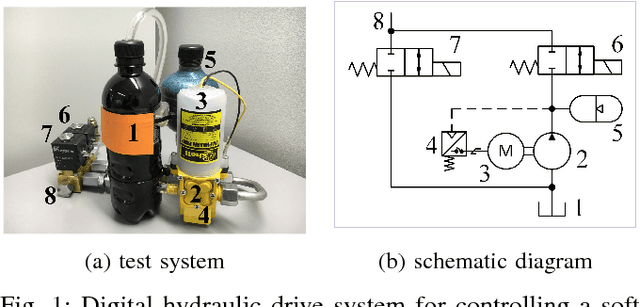
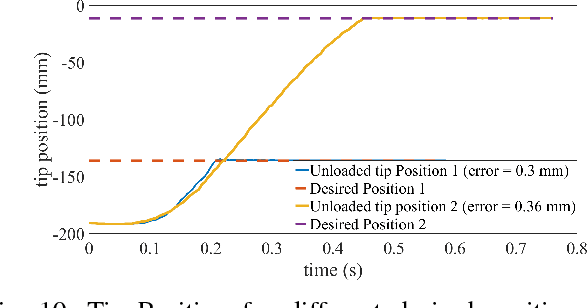
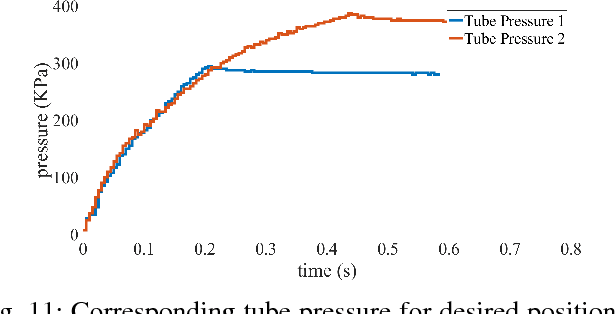
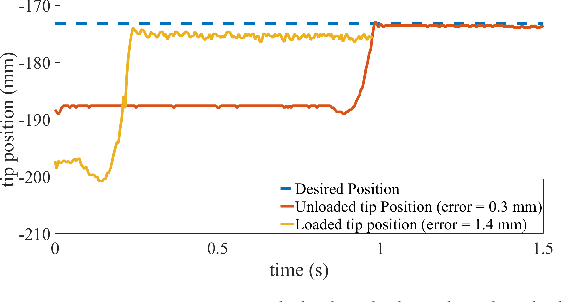
This paper presents design, fabrication and control of a compliant 2D manipulator, a so called soft actuator. Our focus is on fiber-reinforced elastomer actuators driven by a constant pressure hydraulic supply and modulated on/off valves. For a given diameters, we study the effect of four different elastomer materials and that of number of reinforcement fiber turns on forces generated by the actuator and maximum bending angles. For the rest of the study, we use polydimethylosiloxane (PDMS) with 240 fiber turns per 170mm length of actuator which withstand highest pressures and forces in our experiments. For the rest of the paper, we introduce two control methodologies. Firstly, we show that is possible to reasonably accurately control the pressure inside tube without measuring the pressure incorporating a simple linear tube model. This can be used, for example, in an inner-outer loop configuration with a PI position control to achieve high performance without the need for pressure measurement. Secondly, we experimentally show that a switching position control exhibits very good steady state accuracy and acceptable transient. Actuator tip position is measured using an external vision system. Our experiments included performance analysis of our soft manipulator while freely moving as well as when carrying a load.