 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKinematics and Dynamic Modeling of a Planar Hydraulic Elastomer Actuator
Jun 13, 2018
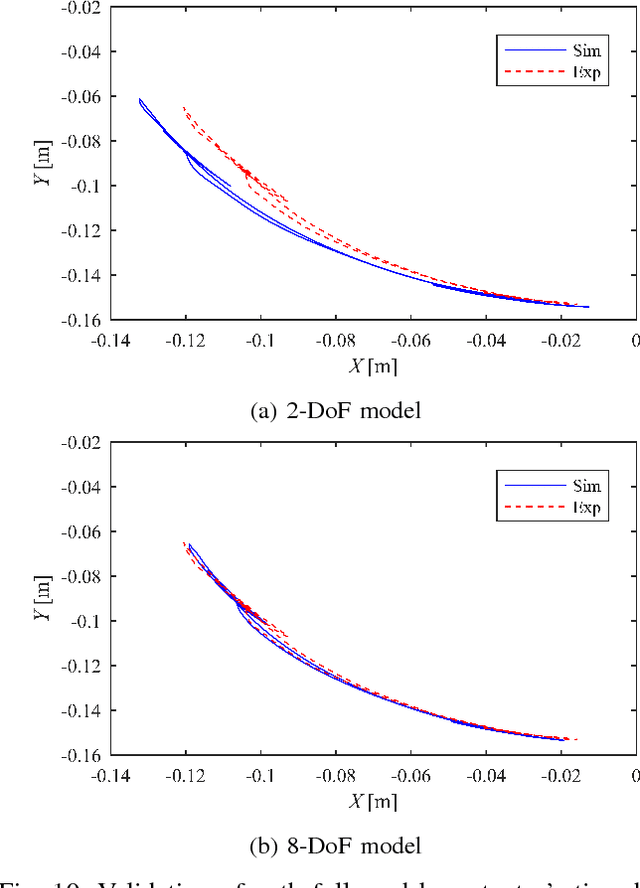

This paper presents modeling of a compliant 2D manipulator, a so called soft hydraulic/fluidic elastomer actuator. Our focus is on fiber-Reinforced Fluidic Elastomer Actuators (RFEA) driven by a constant pressure hydraulic supply and modulated on/off valves. We present a model that not only provides the dynamics behavior of the system but also the kinematics of the actuator. In addition to that, the relation between the applied hydraulic pressure and the bending angle of the soft actuator and thus, its tip position is formulated in a systematic way. We also present a steady state model that calculates the bending angle given the fluid pressure which can be beneficial to find out the initial values of the parameters during the system identification process. Our experimental results verify and validate the performance of the proposed modeling approach both in transition and steady states. Due to its inherent simplicity, this model shall also be used in real-time control of the soft actuators.