Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSurface Type Classification for Autonomous Robot Indoor Navigation
Paper and Code
May 01, 2019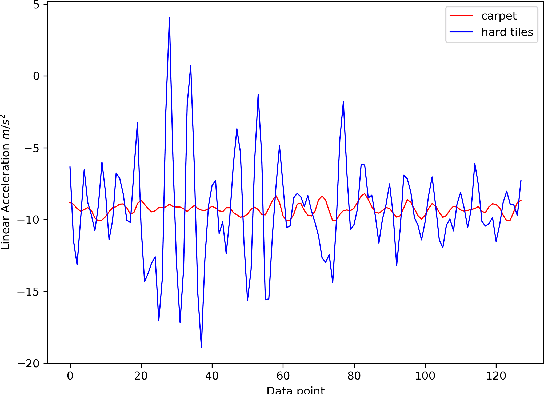
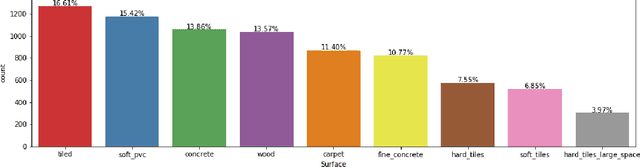
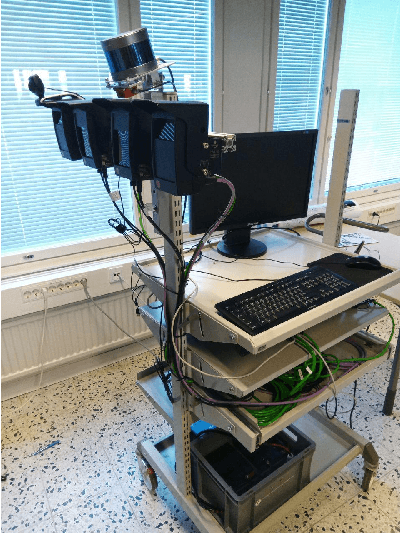
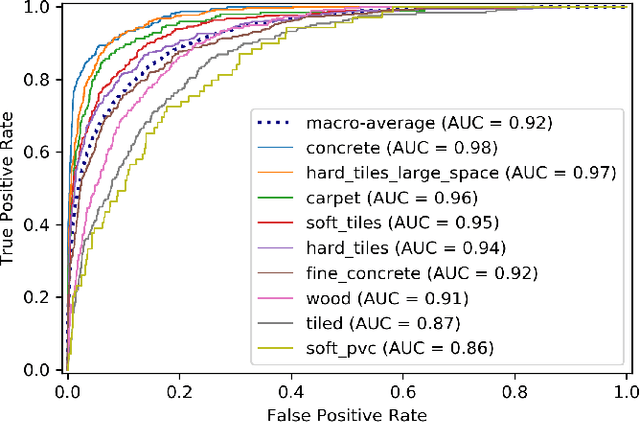
In this work we describe the preparation of a time series dataset of inertial measurements for determining the surface type under a wheeled robot. The data consists of over 7600 labeled time series samples, with the corresponding surface type annotation. This data was used in two public competitions with over 1500 participant in total. Additionally, we describe the performance of state-of-art deep learning models for time series classification, as well as propose a baseline model based on an ensemble of machine learning methods. The baseline achieves an accuracy of over 68% with our nine-category dataset.
View paper on