 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMotion-based extrinsic sensor-to-sensor calibration: Effect of reference frame selection for new and existing methods
Mar 06, 2023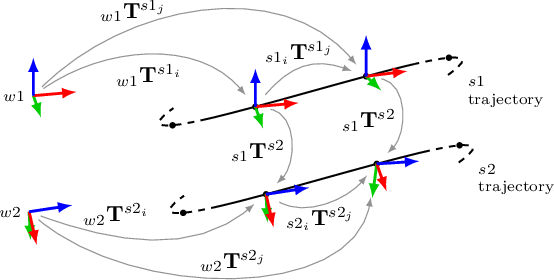
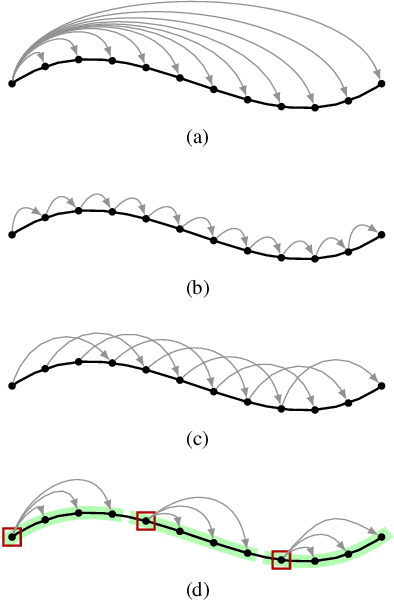
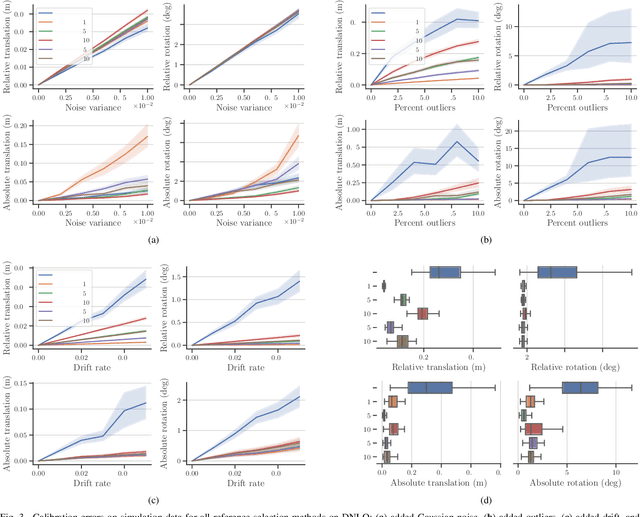

This paper studies the effect of reference frame selection in sensor-to-sensor extrinsic calibration when formulated as a motion-based hand-eye calibration problem. Different reference selection options are tested under varying noise conditions in simulation, and the findings are validated with real data from the KITTI dataset. We propose two nonlinear cost functions for optimization and compare them with four state-of-the-art methods. One of the proposed cost functions incorporates outlier rejection to improve calibration performance and was shown to significantly improve performance in the presence of outliers, and either match or outperform the other algorithms in other noise conditions. However, the performance gain from reference frame selection was deemed larger than that from algorithm selection. In addition, we show that with realistic noise, the reference frame selection method commonly used in literature is inferior to other tested options, and that relative error metrics are not reliable for telling which method achieves best calibration performance.
Evaluation and comparison of eight popular Lidar and Visual SLAM algorithms
Aug 03, 2022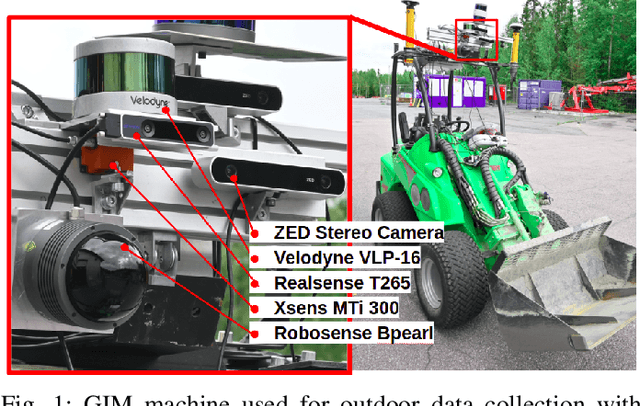
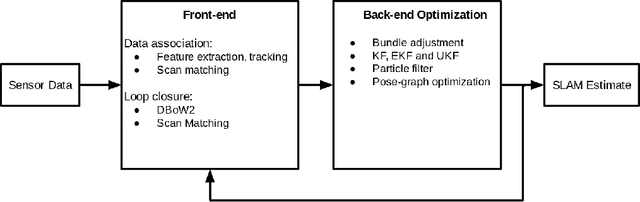

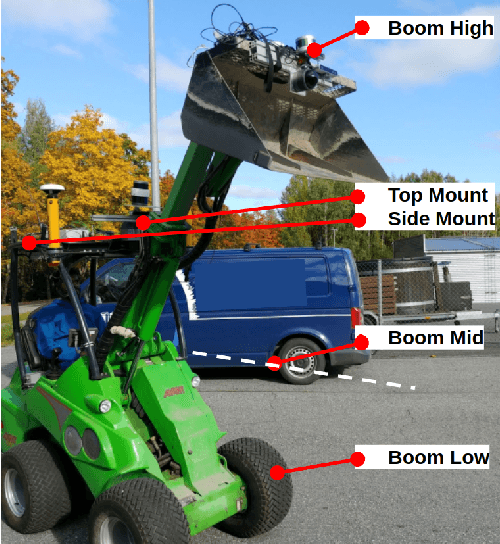
In this paper, we evaluate eight popular and open-source 3D Lidar and visual SLAM (Simultaneous Localization and Mapping) algorithms, namely LOAM, Lego LOAM, LIO SAM, HDL Graph, ORB SLAM3, Basalt VIO, and SVO2. We have devised experiments both indoor and outdoor to investigate the effect of the following items: i) effect of mounting positions of the sensors, ii) effect of terrain type and vibration, iii) effect of motion (variation in linear and angular speed). We compare their performance in terms of relative and absolute pose error. We also provide comparison on their required computational resources. We thoroughly analyse and discuss the results and identify the best performing system for the environment cases with our multi-camera and multi-Lidar indoor and outdoor datasets. We hope our findings help one to choose a sensor and the corresponding SLAM algorithm combination suiting their needs, based on their target environment.