 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMotion-based extrinsic sensor-to-sensor calibration: Effect of reference frame selection for new and existing methods
Mar 06, 2023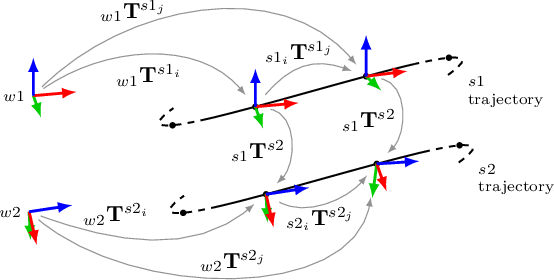
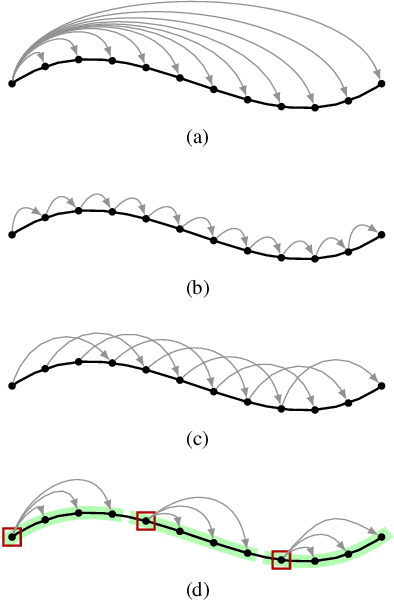
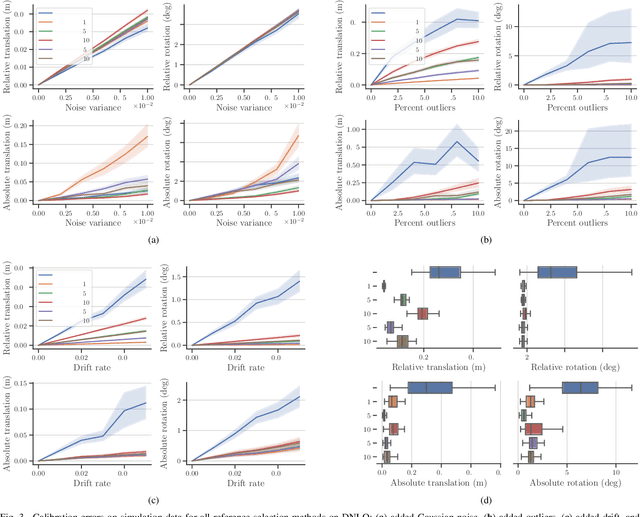

This paper studies the effect of reference frame selection in sensor-to-sensor extrinsic calibration when formulated as a motion-based hand-eye calibration problem. Different reference selection options are tested under varying noise conditions in simulation, and the findings are validated with real data from the KITTI dataset. We propose two nonlinear cost functions for optimization and compare them with four state-of-the-art methods. One of the proposed cost functions incorporates outlier rejection to improve calibration performance and was shown to significantly improve performance in the presence of outliers, and either match or outperform the other algorithms in other noise conditions. However, the performance gain from reference frame selection was deemed larger than that from algorithm selection. In addition, we show that with realistic noise, the reference frame selection method commonly used in literature is inferior to other tested options, and that relative error metrics are not reliable for telling which method achieves best calibration performance.
Optimizing Gaze Direction in a Visual Navigation Task
Feb 16, 2016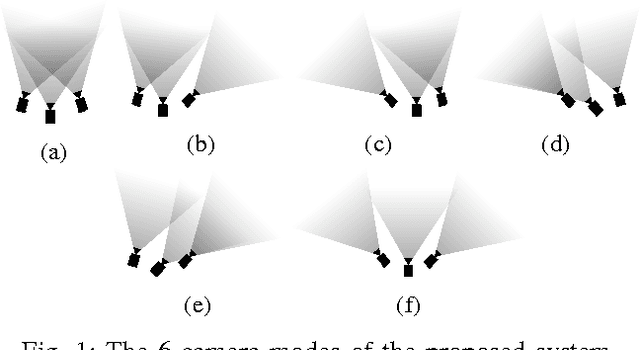
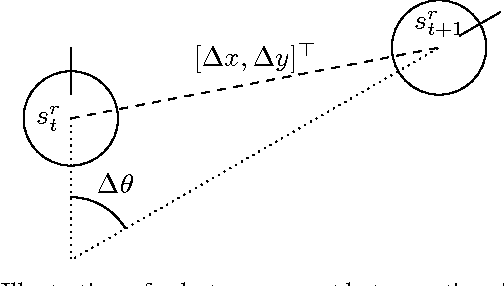
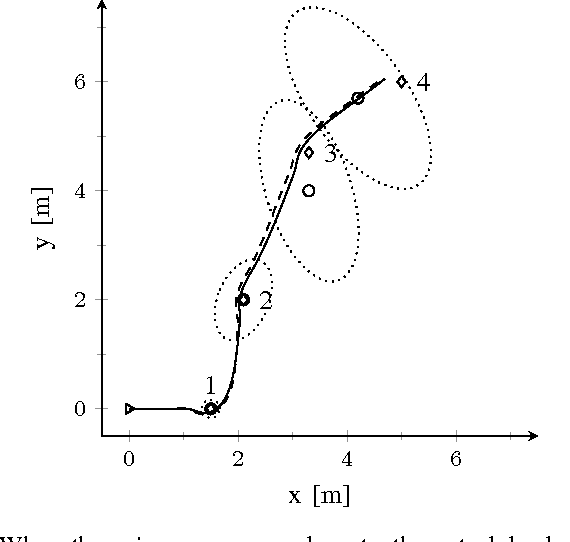
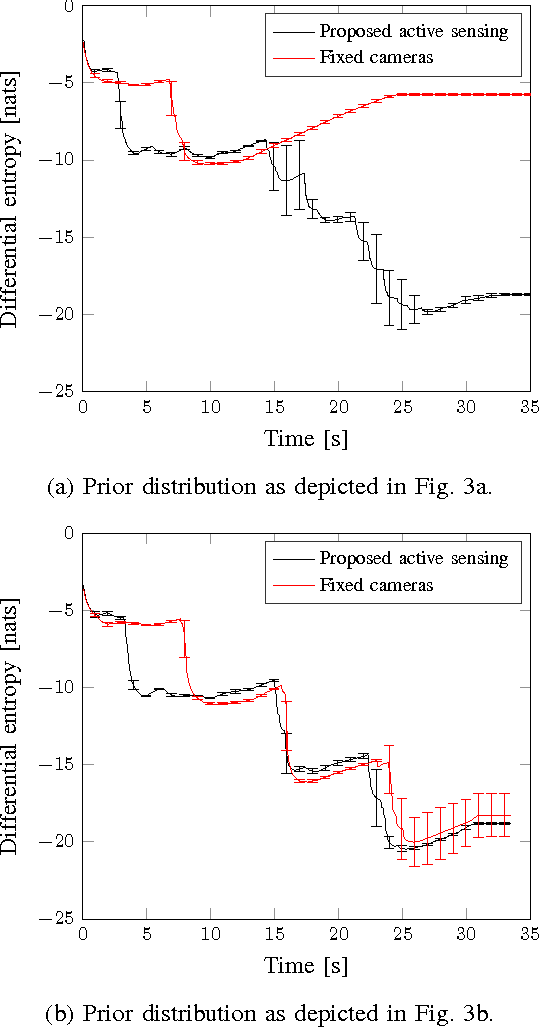
Navigation in an unknown environment consists of multiple separable subtasks, such as collecting information about the surroundings and navigating to the current goal. In the case of pure visual navigation, all these subtasks need to utilize the same vision system, and therefore a way to optimally control the direction of focus is needed. We present a case study, where we model the active sensing problem of directing the gaze of a mobile robot with three machine vision cameras as a partially observable Markov decision process (POMDP) using a mutual information (MI) based reward function. The key aspect of the solution is that the cameras are dynamically used either in monocular or stereo configuration. The benefits of using the proposed active sensing implementation are demonstrated with simulations and experiments on a real robot.