 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimizing Gaze Direction in a Visual Navigation Task
Paper and Code
Feb 16, 2016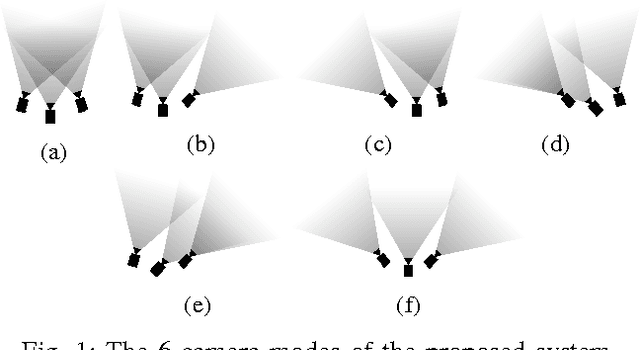
Navigation in an unknown environment consists of multiple separable subtasks, such as collecting information about the surroundings and navigating to the current goal. In the case of pure visual navigation, all these subtasks need to utilize the same vision system, and therefore a way to optimally control the direction of focus is needed. We present a case study, where we model the active sensing problem of directing the gaze of a mobile robot with three machine vision cameras as a partially observable Markov decision process (POMDP) using a mutual information (MI) based reward function. The key aspect of the solution is that the cameras are dynamically used either in monocular or stereo configuration. The benefits of using the proposed active sensing implementation are demonstrated with simulations and experiments on a real robot.