 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertainty-Driven Radar-Inertial Fusion for Instantaneous 3D Ego-Velocity Estimation
Jun 17, 2025We present a method for estimating ego-velocity in autonomous navigation by integrating high-resolution imaging radar with an inertial measurement unit. The proposed approach addresses the limitations of traditional radar-based ego-motion estimation techniques by employing a neural network to process complex-valued raw radar data and estimate instantaneous linear ego-velocity along with its associated uncertainty. This uncertainty-aware velocity estimate is then integrated with inertial measurement unit data using an Extended Kalman Filter. The filter leverages the network-predicted uncertainty to refine the inertial sensor's noise and bias parameters, improving the overall robustness and accuracy of the ego-motion estimation. We evaluated the proposed method on the publicly available ColoRadar dataset. Our approach achieves significantly lower error compared to the closest publicly available method and also outperforms both instantaneous and scan matching-based techniques.
Evaluation and comparison of eight popular Lidar and Visual SLAM algorithms
Aug 03, 2022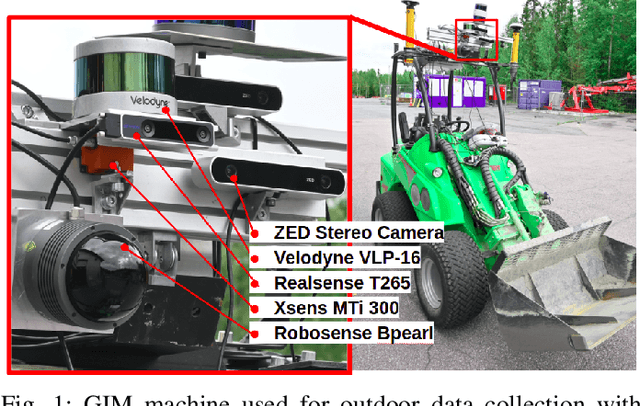
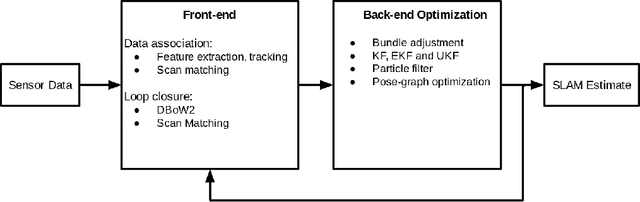

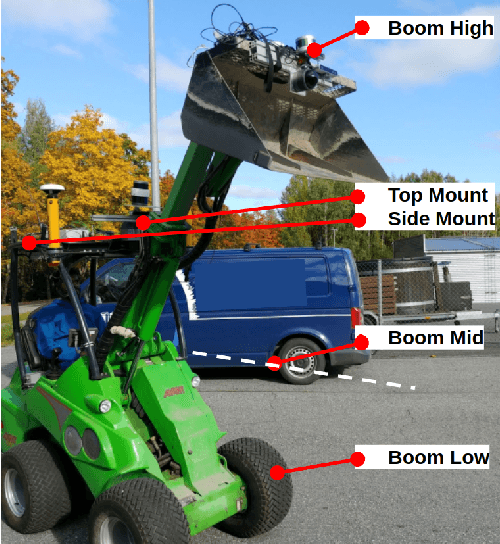
In this paper, we evaluate eight popular and open-source 3D Lidar and visual SLAM (Simultaneous Localization and Mapping) algorithms, namely LOAM, Lego LOAM, LIO SAM, HDL Graph, ORB SLAM3, Basalt VIO, and SVO2. We have devised experiments both indoor and outdoor to investigate the effect of the following items: i) effect of mounting positions of the sensors, ii) effect of terrain type and vibration, iii) effect of motion (variation in linear and angular speed). We compare their performance in terms of relative and absolute pose error. We also provide comparison on their required computational resources. We thoroughly analyse and discuss the results and identify the best performing system for the environment cases with our multi-camera and multi-Lidar indoor and outdoor datasets. We hope our findings help one to choose a sensor and the corresponding SLAM algorithm combination suiting their needs, based on their target environment.
Monolithic vs. hybrid controller for multi-objective Sim-to-Real learning
Aug 17, 2021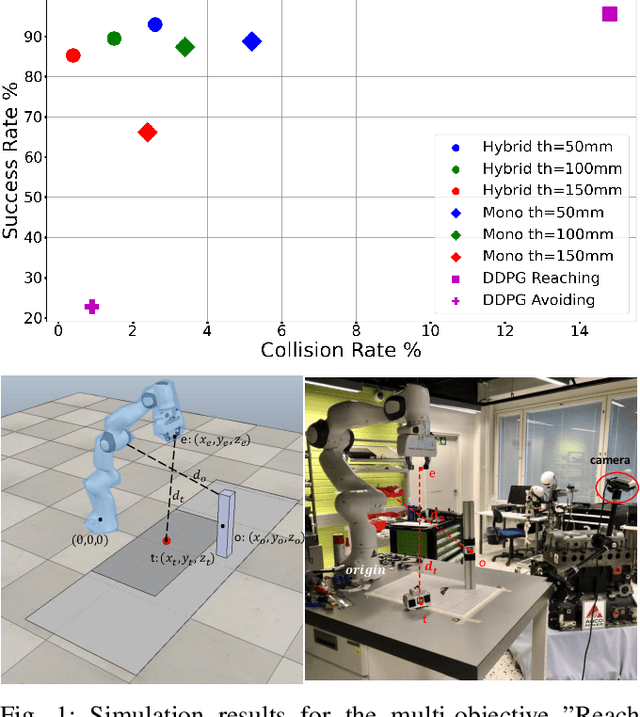
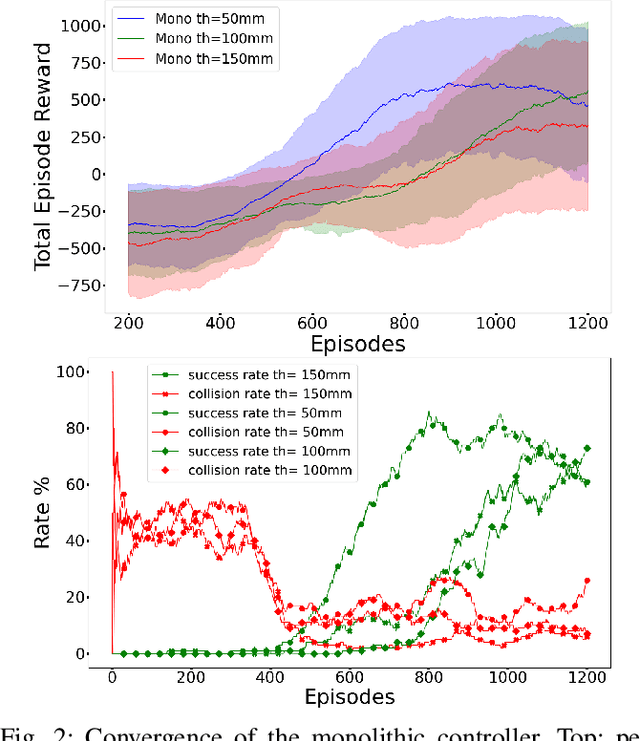
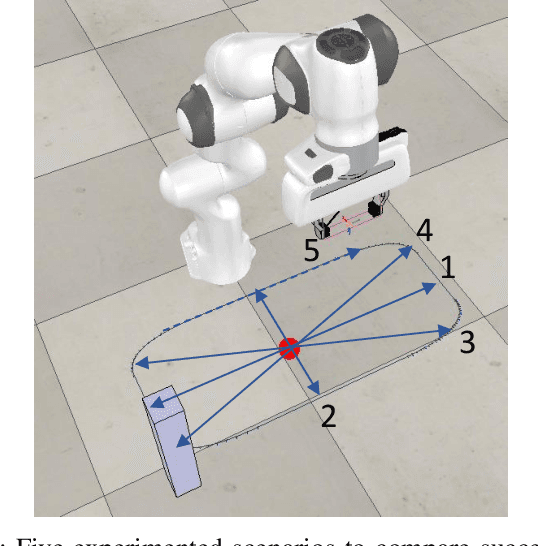
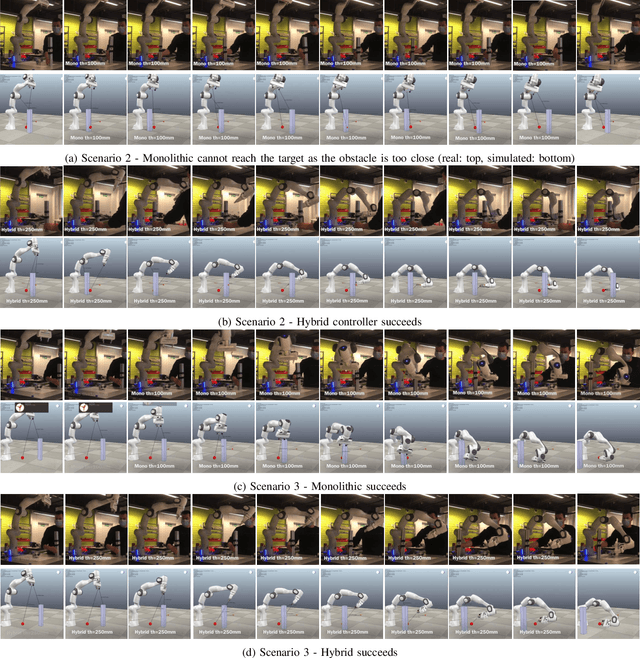
Simulation to real (Sim-to-Real) is an attractive approach to construct controllers for robotic tasks that are easier to simulate than to analytically solve. Working Sim-to-Real solutions have been demonstrated for tasks with a clear single objective such as "reach the target". Real world applications, however, often consist of multiple simultaneous objectives such as "reach the target" but "avoid obstacles". A straightforward solution in the context of reinforcement learning (RL) is to combine multiple objectives into a multi-term reward function and train a single monolithic controller. Recently, a hybrid solution based on pre-trained single objective controllers and a switching rule between them was proposed. In this work, we compare these two approaches in the multi-objective setting of a robot manipulator to reach a target while avoiding an obstacle. Our findings show that the training of a hybrid controller is easier and obtains a better success-failure trade-off than a monolithic controller. The controllers trained in simulator were verified by a real set-up.
Neural Network Controller for Autonomous Pile Loading Revised
Mar 23, 2021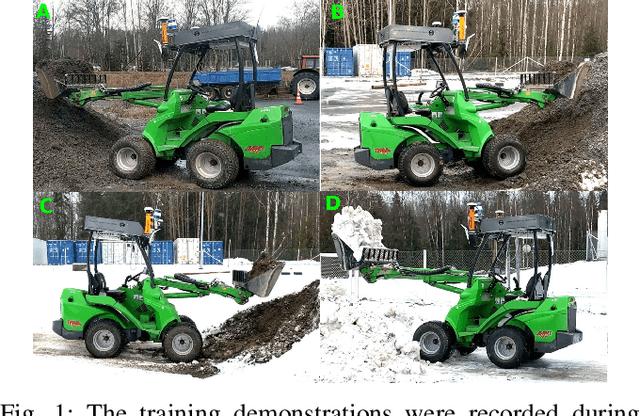
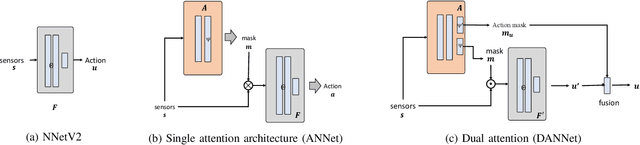
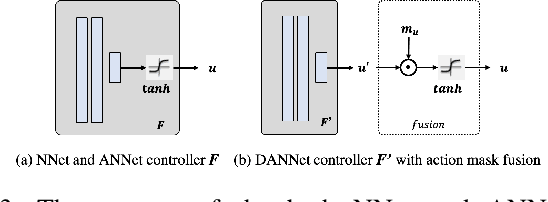
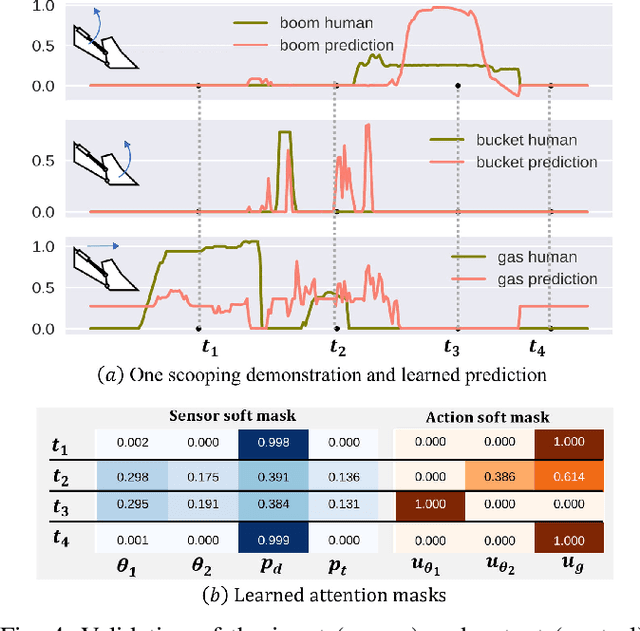
We have recently proposed two pile loading controllers that learn from human demonstrations: a neural network (NNet) [1] and a random forest (RF) controller [2]. In the field experiments the RF controller obtained clearly better success rates. In this work, the previous findings are drastically revised by experimenting summer time trained controllers in winter conditions. The winter experiments revealed a need for additional sensors, more training data, and a controller that can take advantage of these. Therefore, we propose a revised neural controller (NNetV2) which has a more expressive structure and uses a neural attention mechanism to focus on important parts of the sensor and control signals. Using the same data and sensors to train and test the three controllers, NNetV2 achieves better robustness against drastically changing conditions and superior success rate. To the best of our knowledge, this is the first work testing a learning-based controller for a heavy-duty machine in drastically varying outdoor conditions and delivering high success rate in winter, being trained in summer.