 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Network Controller for Autonomous Pile Loading Revised
Mar 23, 2021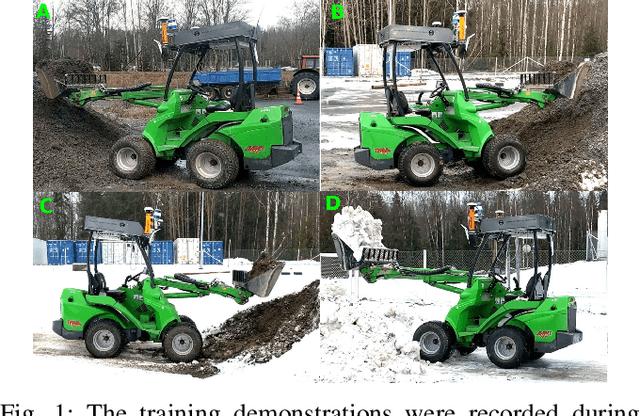
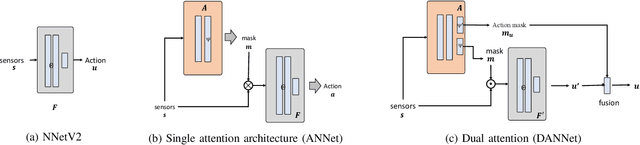
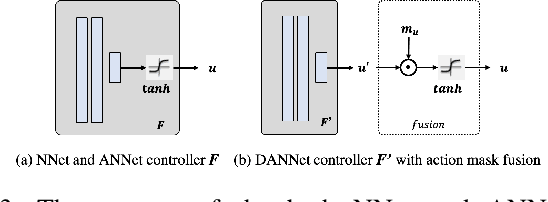
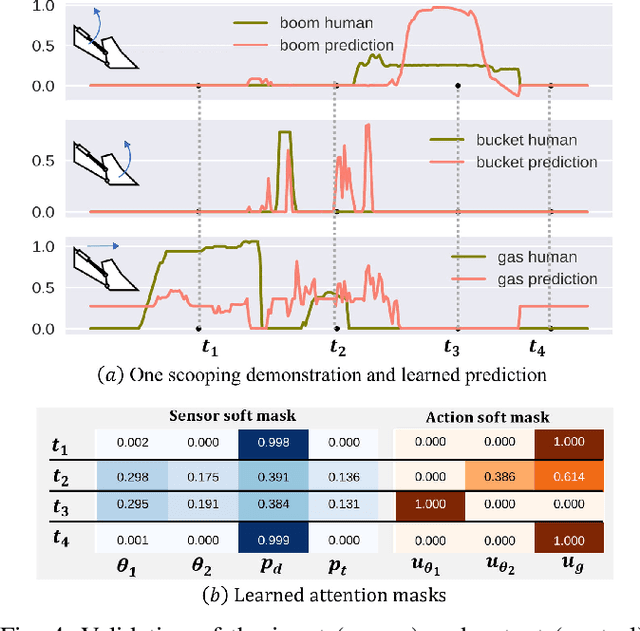
We have recently proposed two pile loading controllers that learn from human demonstrations: a neural network (NNet) [1] and a random forest (RF) controller [2]. In the field experiments the RF controller obtained clearly better success rates. In this work, the previous findings are drastically revised by experimenting summer time trained controllers in winter conditions. The winter experiments revealed a need for additional sensors, more training data, and a controller that can take advantage of these. Therefore, we propose a revised neural controller (NNetV2) which has a more expressive structure and uses a neural attention mechanism to focus on important parts of the sensor and control signals. Using the same data and sensors to train and test the three controllers, NNetV2 achieves better robustness against drastically changing conditions and superior success rate. To the best of our knowledge, this is the first work testing a learning-based controller for a heavy-duty machine in drastically varying outdoor conditions and delivering high success rate in winter, being trained in summer.
Reconfigurable Manipulator Simulation for Robotics and Multimodal Machine Learning Application: Aaria
Mar 01, 2018



This paper represents a systematic way for generation of Aaria, a simulated model for serial manipulators for the purpose of kinematic or dynamic analysis with a vast variety of structures based on Simulink SimMechanics. The proposed model can receive configuration parameters, for instance in accordance with modified Denavit-Hartenberg convention, or trajectories for its base or joints for structures with 1 to 6 degrees of freedom (DOF). The manipulator is equipped with artificial joint sensors as well as simulated Inertial Measurement Units (IMUs) on each link. The simulation output can be positions, velocities, torques, in the joint space or IMU outputs; angular velocity, linear acceleration, tool coordinates with respect to the inertial frame. This simulation model is a source of a dataset for virtual multimodal sensory data for automation of robot modeling and control designed for machine learning and deep learning approaches based on big data.