 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSeq2Seq Imitation Learning for Tactile Feedback-based Manipulation
Mar 05, 2023Robot control for tactile feedback-based manipulation can be difficult due to the modeling of physical contacts, partial observability of the environment, and noise in perception and control. This work focuses on solving partial observability of contact-rich manipulation tasks as a Sequence-to-Sequence (Seq2Seq)} Imitation Learning (IL) problem. The proposed Seq2Seq model produces a robot-environment interaction sequence to estimate the partially observable environment state variables. Then, the observed interaction sequence is transformed to a control sequence for the task itself. The proposed Seq2Seq IL for tactile feedback-based manipulation is experimentally validated on a door-open task in a simulated environment and a snap-on insertion task with a real robot. The model is able to learn both tasks from only 50 expert demonstrations, while state-of-the-art reinforcement learning and imitation learning methods fail.
Monolithic vs. hybrid controller for multi-objective Sim-to-Real learning
Aug 17, 2021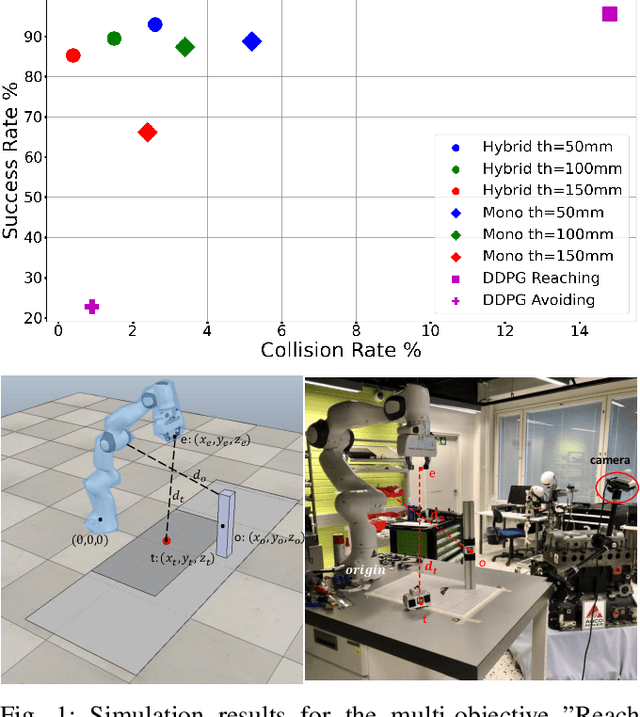
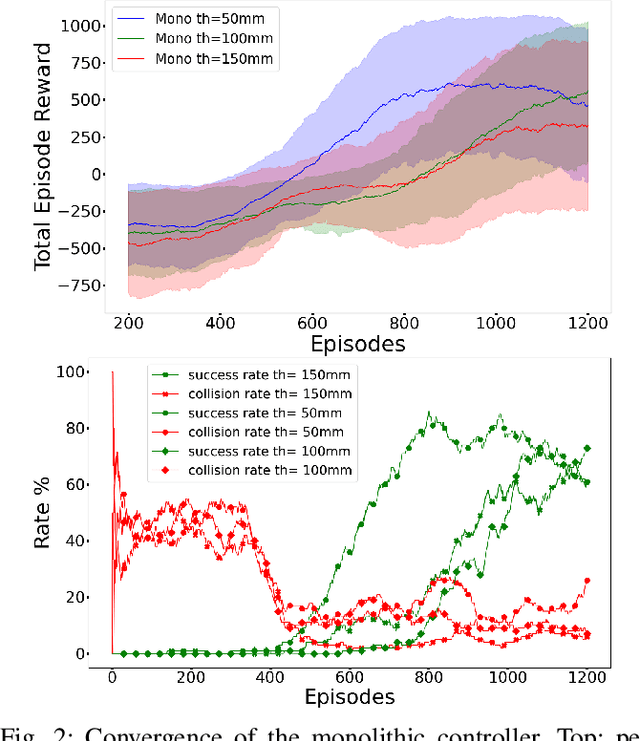
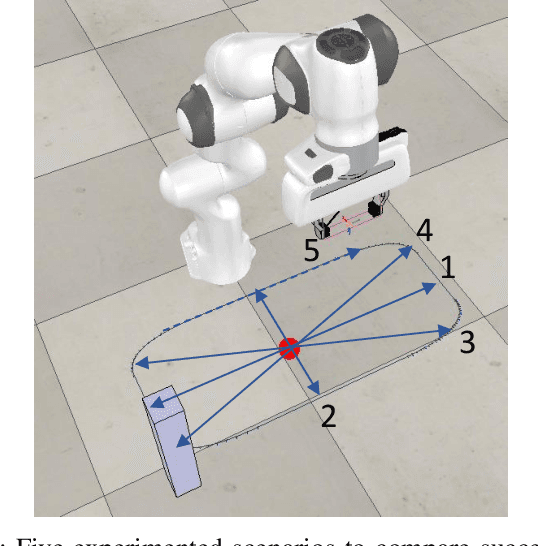
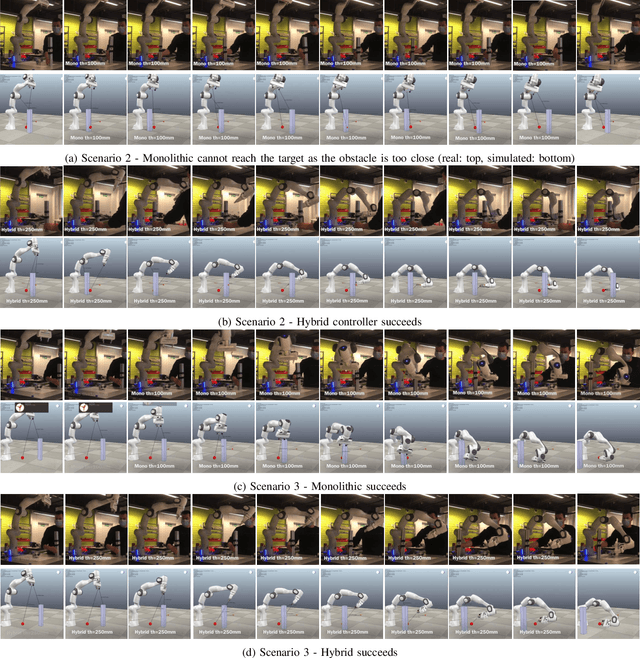
Simulation to real (Sim-to-Real) is an attractive approach to construct controllers for robotic tasks that are easier to simulate than to analytically solve. Working Sim-to-Real solutions have been demonstrated for tasks with a clear single objective such as "reach the target". Real world applications, however, often consist of multiple simultaneous objectives such as "reach the target" but "avoid obstacles". A straightforward solution in the context of reinforcement learning (RL) is to combine multiple objectives into a multi-term reward function and train a single monolithic controller. Recently, a hybrid solution based on pre-trained single objective controllers and a switching rule between them was proposed. In this work, we compare these two approaches in the multi-objective setting of a robot manipulator to reach a target while avoiding an obstacle. Our findings show that the training of a hybrid controller is easier and obtains a better success-failure trade-off than a monolithic controller. The controllers trained in simulator were verified by a real set-up.