 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMonolithic vs. hybrid controller for multi-objective Sim-to-Real learning
Aug 17, 2021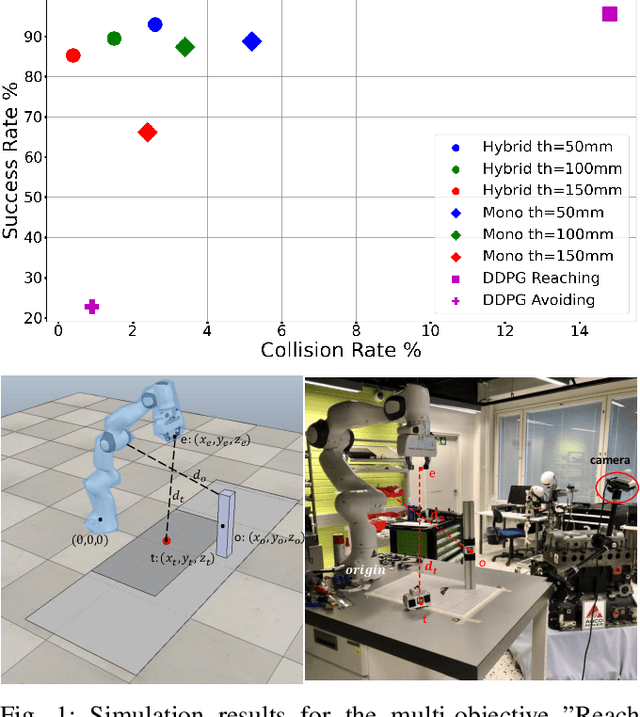
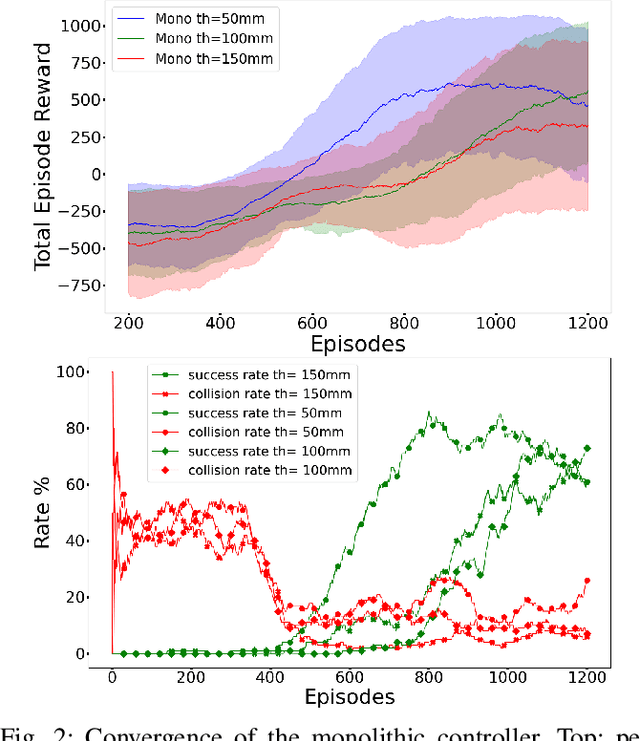
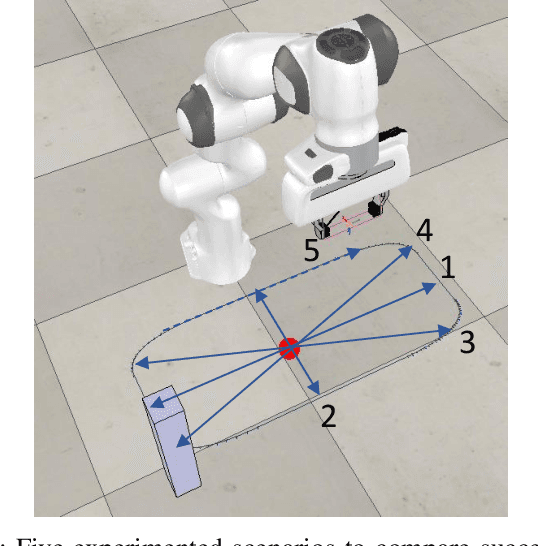
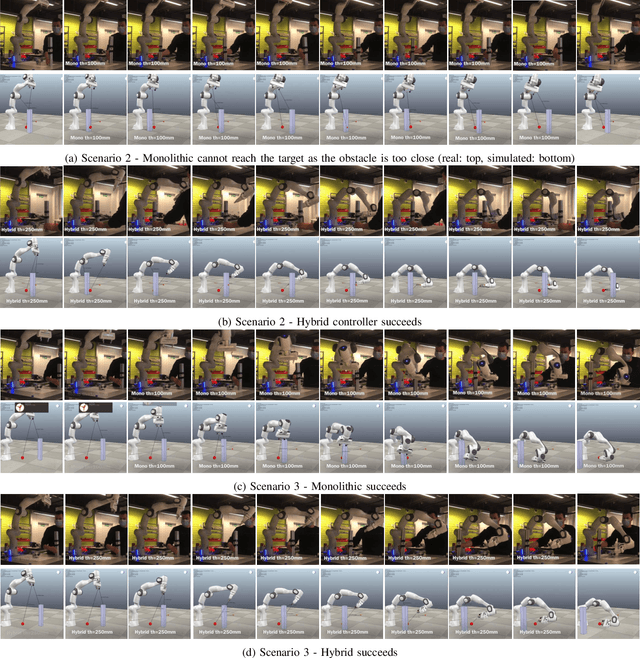
Simulation to real (Sim-to-Real) is an attractive approach to construct controllers for robotic tasks that are easier to simulate than to analytically solve. Working Sim-to-Real solutions have been demonstrated for tasks with a clear single objective such as "reach the target". Real world applications, however, often consist of multiple simultaneous objectives such as "reach the target" but "avoid obstacles". A straightforward solution in the context of reinforcement learning (RL) is to combine multiple objectives into a multi-term reward function and train a single monolithic controller. Recently, a hybrid solution based on pre-trained single objective controllers and a switching rule between them was proposed. In this work, we compare these two approaches in the multi-objective setting of a robot manipulator to reach a target while avoiding an obstacle. Our findings show that the training of a hybrid controller is easier and obtains a better success-failure trade-off than a monolithic controller. The controllers trained in simulator were verified by a real set-up.
AR-based interaction for safe human-robot collaborative manufacturing
Sep 06, 2019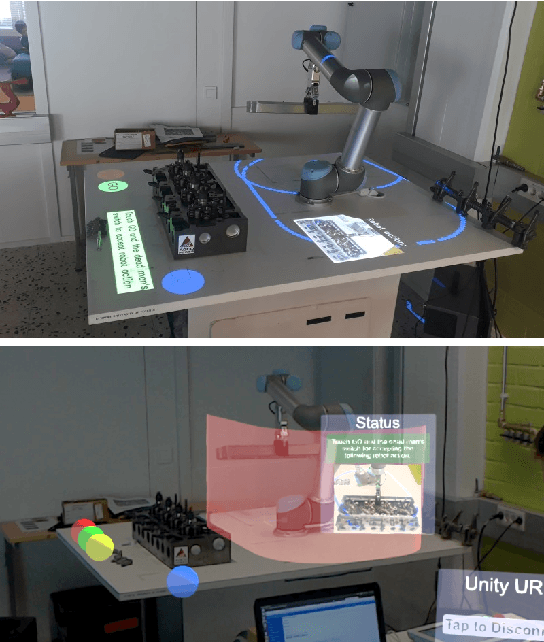
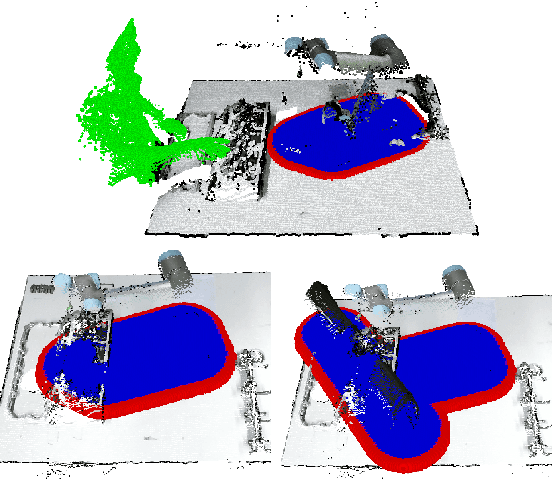
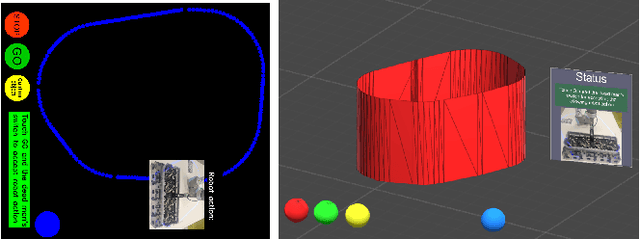
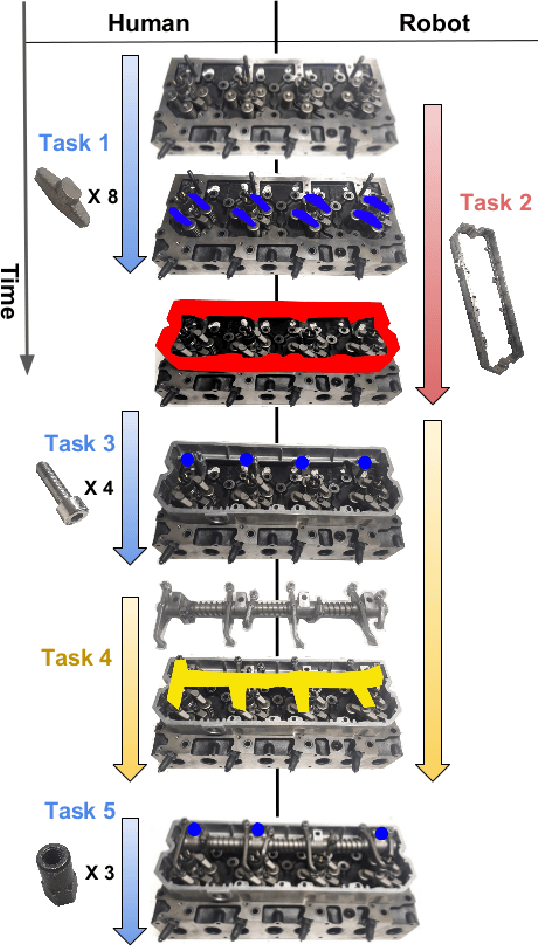
Industrial standards define safety requirements for Human-Robot Collaboration (HRC) in industrial manufacturing. The standards particularly require real-time monitoring and securing of the minimum protective distance between a robot and an operator. In this work, we propose a depth-sensor based model for workspace monitoring and an interactive Augmented Reality (AR) User Interface (UI) for safe HRC. The AR UI is implemented on two different hardware: a projector-mirror setup anda wearable AR gear (HoloLens). We experiment the workspace model and UIs for a realistic diesel motor assembly task. The AR-based interactive UIs provide 21-24% and 57-64% reduction in the task completion and robot idle time, respectively, as compared to a baseline without interaction and workspace sharing. However, subjective evaluations reveal that HoloLens based AR is not yet suitable for industrial manufacturing while the projector-mirror setup shows clear improvements in safety and work ergonomics.
Benchmarking 6D Object Pose Estimation for Robotics
Jun 06, 2019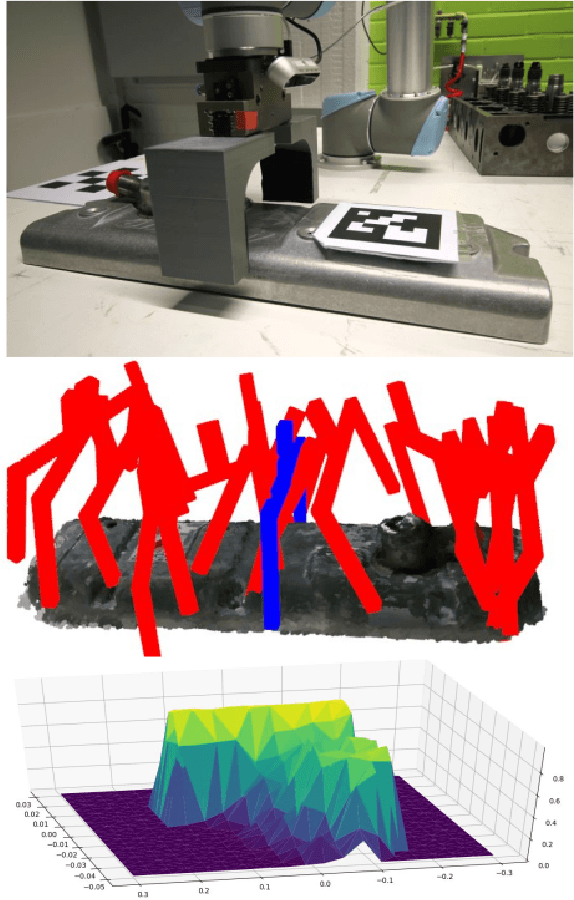
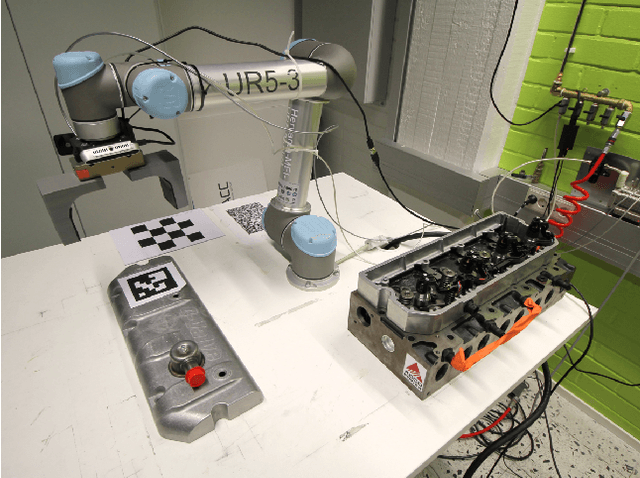
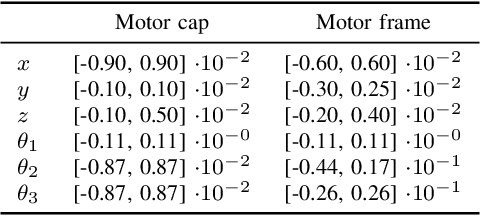
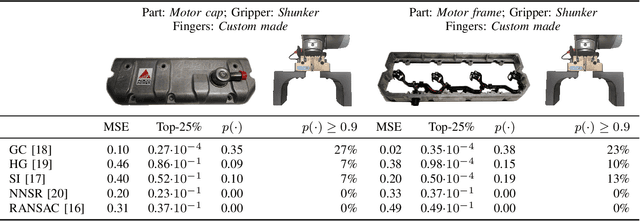
Benchmarking 6D object pose estimation for robotics is not straightforward as sufficient accuracy depends on many factors, e.g., the selected gripper, dimensions, weight and material of an object, grasping point, and the robot task itself. We formulate the problem as a successful grasp, i.e. for a fixed set of factors affecting the task, will the given pose estimate provide sufficiently good grasp to complete the task. The successful grasp is modelled in a probabilistic framework by sampling in the pose error space and executing the task and automatically detecting success or failure. Hours of sampling and thousands of samples are used to construct a non-parametric probability of a successful grasp given the pose residual. The framework is experimentally validated with real objects and assembly tasks and comparison of several state-of-the-art point cloud based 3D pose estimation methods.