 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBM4D-PC: nonlocal volumetric denoising of principal components of diffusion-weighted MR images
Dec 19, 2025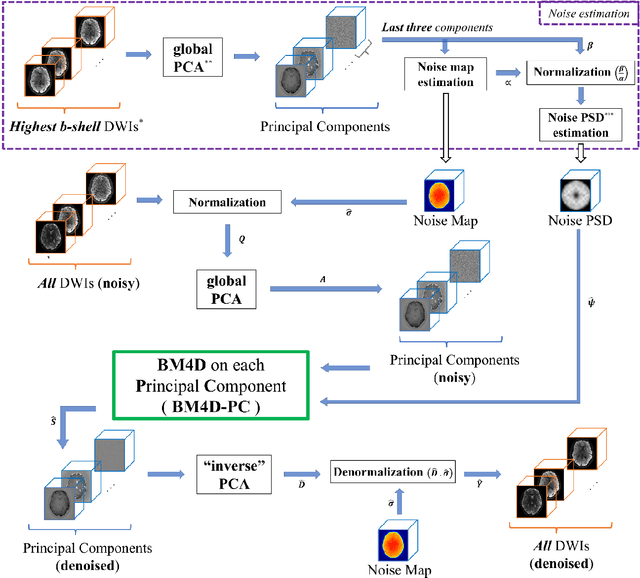
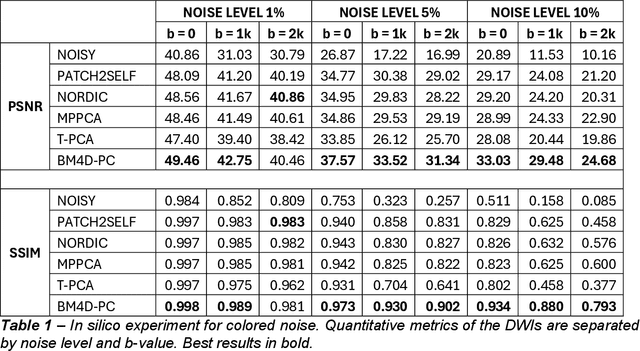
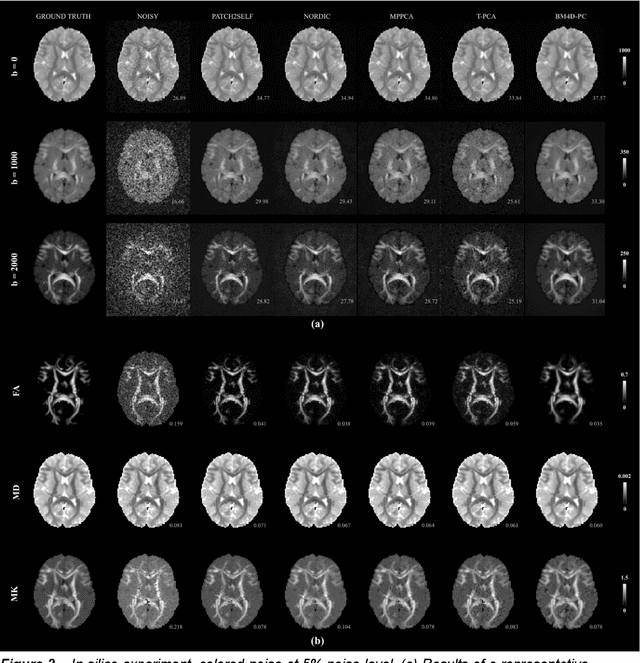
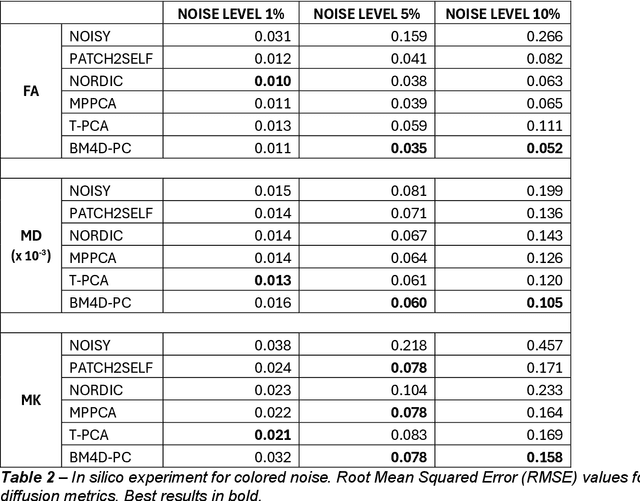
Purpose: Noise in diffusion-weighted MRI (dMRI) is often spatially correlated due to different acquisition and reconstruction strategies, which is not fully accounted for in current denoising strategies. Thus, we propose a novel model-based denoising method for dMRI that effectively accounts for the different noise characteristics of data. Methods: We propose a denoising strategy that incorporates full noise statistics, including the noise power spectral density (PSD), by leveraging the BM4D algorithm. Furthermore, to exploit redundancy across the diffusion MRI dataset, BM4D is applied to principal components (PC) of diffusion-weighted images (DWI) obtained through principal component analysis (PCA) decomposition of the entire DWI dataset, an approach we refer to as BM4D-PC. Importantly, our method also allows for direct estimation of both the noise map and PSD. We evaluated BM4D-PC against four existing state-of-the-art methods using in-silico and in vivo datasets, including high-resolution human and marmoset acquisitions. Results: Overall, BM4D-PC presented the best results for the metrics PSNR, SSIM and RMSE on the in-silico experiments. The in-vivo studies also showed that BM4D-PC dramatically enhanced the image quality of raw DWIs, outperforming existing denoising methods in terms of noise suppression and detail preservation, leading to improved quality of diffusion metrics. Conclusion: The proposed BM4D-PC method demonstrated state-of-the-art denoising results for dMRI using datasets from various acquisition strategies and image resolutions, potentially supporting future advances in neuroscience research.
Benchmarking 6D Object Pose Estimation for Robotics
Jun 06, 2019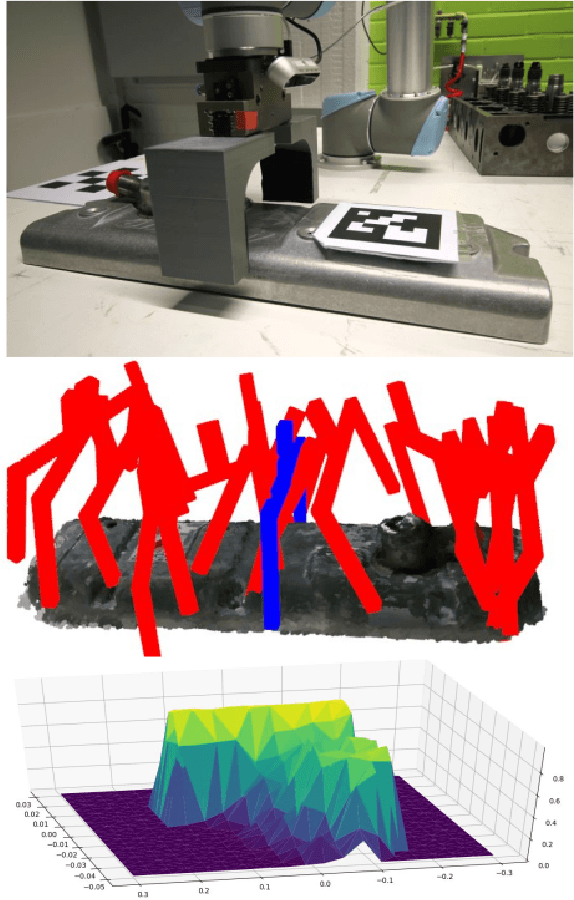
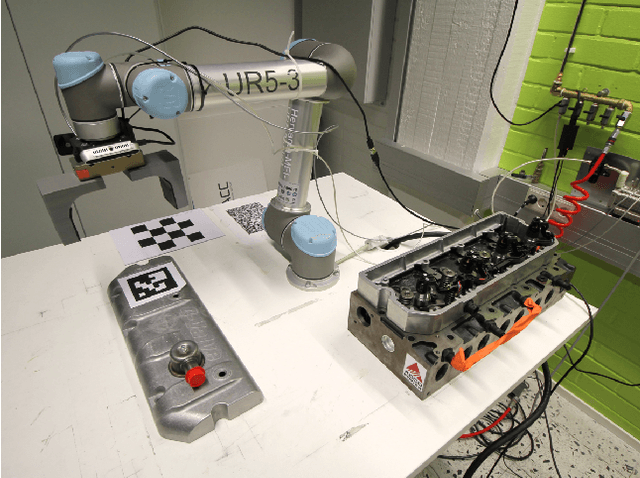
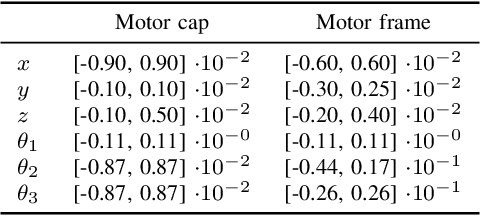
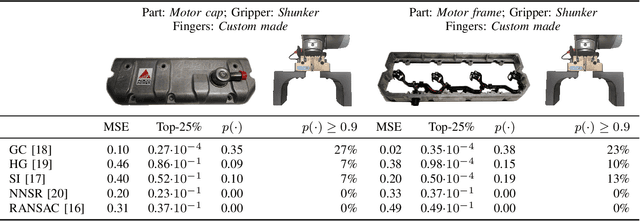
Benchmarking 6D object pose estimation for robotics is not straightforward as sufficient accuracy depends on many factors, e.g., the selected gripper, dimensions, weight and material of an object, grasping point, and the robot task itself. We formulate the problem as a successful grasp, i.e. for a fixed set of factors affecting the task, will the given pose estimate provide sufficiently good grasp to complete the task. The successful grasp is modelled in a probabilistic framework by sampling in the pose error space and executing the task and automatically detecting success or failure. Hours of sampling and thousands of samples are used to construct a non-parametric probability of a successful grasp given the pose residual. The framework is experimentally validated with real objects and assembly tasks and comparison of several state-of-the-art point cloud based 3D pose estimation methods.
Nonlocality-Reinforced Convolutional Neural Networks for Image Denoising
Jun 21, 2018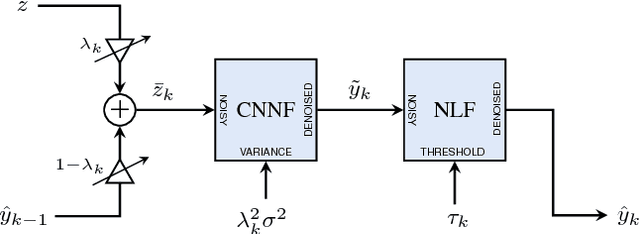


We introduce a paradigm for nonlocal sparsity reinforced deep convolutional neural network denoising. It is a combination of a local multiscale denoising by a convolutional neural network (CNN) based denoiser and a nonlocal denoising based on a nonlocal filter (NLF) exploiting the mutual similarities between groups of patches. CNN models are leveraged with noise levels that progressively decrease at every iteration of our framework, while their output is regularized by a nonlocal prior implicit within the NLF. Unlike complicated neural networks that embed the nonlocality prior within the layers of the network, our framework is modular, it uses standard pre-trained CNNs together with standard nonlocal filters. An instance of the proposed framework, called NN3D, is evaluated over large grayscale image datasets showing state-of-the-art performance.